1
Изобретение относится к технологическому оборудованию нроизводства крупногабаритных кинескопов и предназначено для автоматизации операций перегрузки кинескопов и их полуфабрикатов в процессе изготовления и сборки.
Известен манипулятор но авт. св. № 441141, содержащий механическую руку с плавающим захватным органом, который может перемещаться по четырем степеням свободы: перемещение по вертикали, перемещение по горизонтали, поворот вокруг вертикальной и горизонтальной осей.
Недостатком манипулятора является возможность разворота изделий относительно корпуса руки в процессе перемещения захватного органа, особенно при повороте руки вокруг горизонтальной осн, что снижает надежность манипулятора.
С целью повышения надежности манипулятора за счет предотвращения разворота захватного органа относительно корпуса руки в предлагаемом манипуляторе захватный орган выполнен с хвостовиком, имеющим плоскую в направлении его осп поверхность, сопрягающуюся с пластиной, установленной на ползуне, смонтированном в корпусе руки, причем захватный орган связан с ползуном посредством пружины.
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - разрез по А-А на фиг. 1; на фиг. 3 - разрез но Б-Б на фиг. 2. Манипулятор состоит из тележки 1, смонтированной на монорельсе 2, механической руки 3 с захватным органом 4 и механнзма 5 поворота рукп вокруг вертикальной и горизонтальной осей. Тележка 1 имеет колеса 6 и боковые ограничительиые ролики для качения
но монорельсу. На тележке смонтнрованы привод 7 горизонтального перемещения тележки и привод 8 вертикального перемещения руки. Механизм 5 поворота руки вокруг вертикальной и горизонтальиой осей обеспечнвает вращение механической руки 3 вокруг вертикальной осп 9 и вокруг горизонтальной оси вала 10.
Механическая рука 3 связана с валом 10 механизма поворота и состоит из корпуса 11
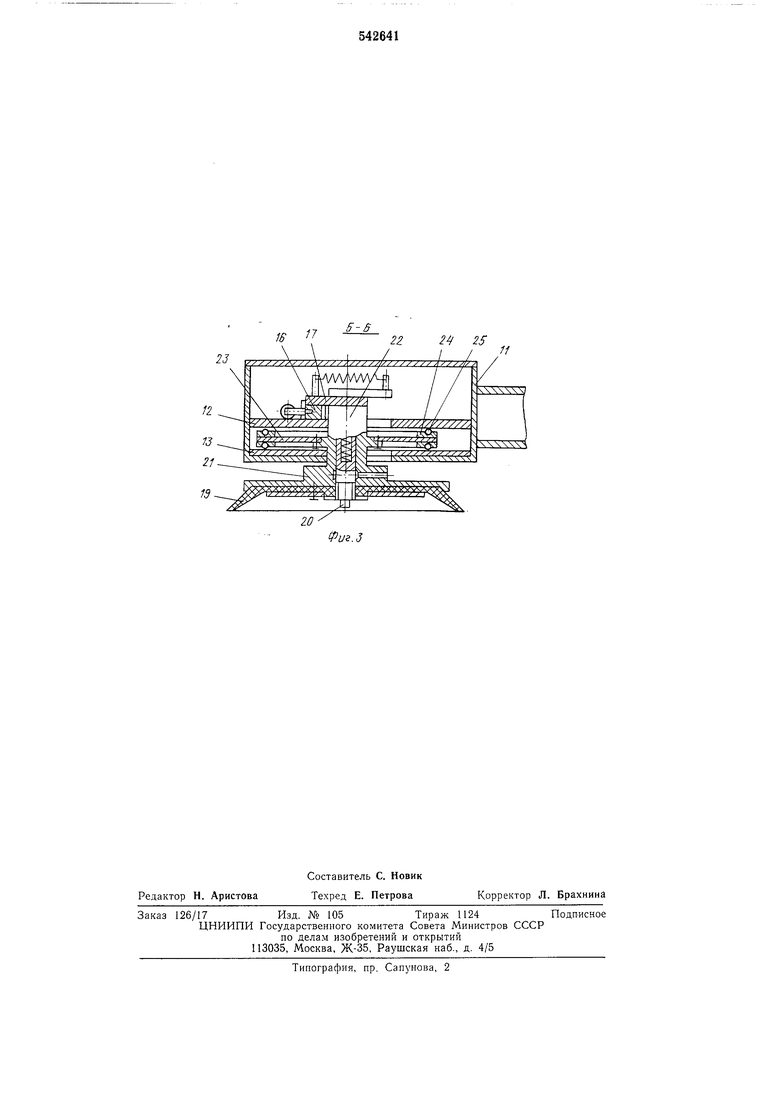
руки и захватного органа 4. В корпусе руки смонтированы направляющие 12 и 13 с окнами и направляющпе 14 п 15, в которых перемещается ползун 16 с закрепленной на нем пластиной 17. Ползуи 16 связан пружиной 18
с корпусом 11 руки.
Захватный орган 4 состоит из вакуумиого присоса 19, золотника 20, корпуса 21 с хвостовнком 22, закрепленного на корпусе 21 диска 23 с сепараторами 24 и щариками 25. Хвостовик 22 расположен внутри окон в нанравляющих 12 и 13 и имеет плоскую в направлении его оси поверхность Д, сопрягающуюся с возможностью перемещения с плоской поверхностью пластины 17. Хвостовик 22 соединен с ползуном 16 пружиной 26. Таким образом хвостовик 22 прижимается к сторонам Г окон в направляющих 12 и 13 пружиной 18 через пластину 17, а к сторонам Д этих окон пружиной 26. Захватный орган 4 может перемещаться в двух направлениях в горизонтальной плоскости в пределах зазора а и б между стенками окон в направляющих 12 и 13 и хвостовиком 22. Этп зазоры выбираются в зависимости от возможной неточности расположения центра изделия, например экрана кинескопа (на фигурах не показан), относительно центра позиции технологической или транспортной машины. Изделие захватывается вакуумным присосом 19 и переносится манипулятором с использованием необходимых степеней свободы к позиции технологической или транспортной машины. При этом благодаря сопряжению хвостовика 22 с пластиной 17 по плоскости отсутствует поворот изделия относительно корпуса 11 руки. При взаимодействии изделия с центрирующими элементами позиции технологической или транспортной машины оно вместе с захватным органом 4 перемещается в двух взаимно-пернендикулярных направлениях: параллельно направлению перемещения ползуна 16 и в перпендикулярном направлении вдоль пластины 17. Перемещаясь параллельно направлению перемещения ползуна 16, хвостовик 22 корпуса 21 своей плоской поверхностью Д давит на плоскую поверхность пластины 17, и последняя перемещается вместе с ползуном 16 в направляющих 14 и 15, растягивая пружину 18. При перемещении в периендикулярном направлении хвостовик 22 своей плоской поверхностью Д сопрягается с пластиной 17, установленной нг ползуне 16, растягивая пружину 26. Перемещение захватного органа в дву взаимно-перпендикулярныхнаправлениях обеспечивает совпаденне центра изделия г центром позиции технологической или транспортной машины. При отключении вакуума изделие остается в позиции технологической транспортной машнны, захватный орган 4 возвращается в крайнее положение под действием пружин 18 и 26, а манипулятор возвра щается в исходное положение. Таким образом, благодаря тому, что захватный орган 4 выполнен с хвостовиком 22, имеющим плоскую в нанравлении его оси поверхность, сопрягающуюся с пластиной 17, установленной на ползуне 16, смонтированном в корпусе 11 руки, а захватный орган 4 связаг с нолзуном 16 посредством пружины 26, по вышается надежность за счет предотвраще ния разворота захватного органа 4 OTHOCIтельно корпуса руки. Формула изобретения 1. Манипулятор по авт. св. № 441141, отличающийся тем, что, с целью повышения надежности за счет предотвращения разворс та захватного органа относительно корпуса руки, захватный орган выполнен с хвостовиком, имеющим плоскую в направлении его оси поверхность, сопрягающуюся с пластиной, установленной на ползуне, смонтированном в корпусе руки. 2. Манипулятор по п. 1, отличающийся тем, что захватный орган связан с ползуном посредством пружины. Источник информации, принятый во внимание при экспертизе. I. Авторское свидетельство СССР № 441141, М. Кл.2 В 25J 5/02, 1972.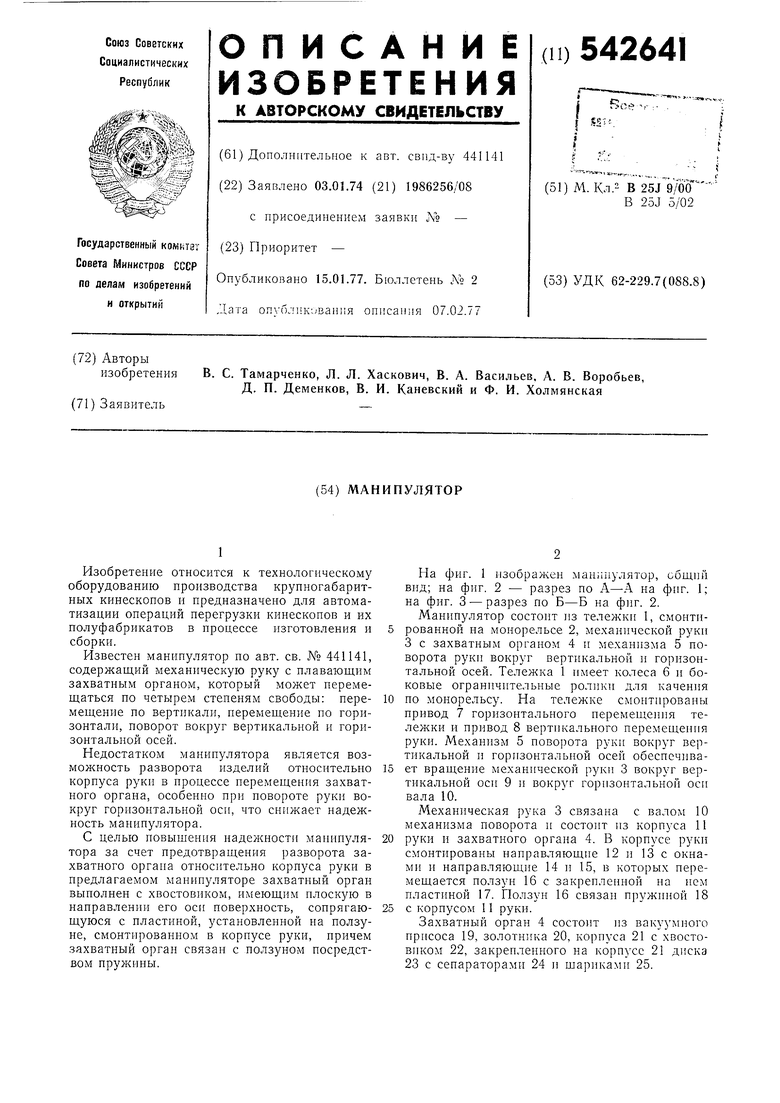
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1972 |
|
SU441141A1 |
| Манипулятор | 1990 |
|
SU1754435A1 |
| Автоматическая линия для транспортировки полуфабрикатов | 1973 |
|
SU653186A1 |
| Устройство для управления перемещением подвижных узлов,например, исполнительных механизмов работаманипулятора | 1974 |
|
SU515633A1 |
| Манипулятор | 1979 |
|
SU900093A1 |
| ТРАНСПОРТИРОВОЧНОЕ УСТРОЙСТВО | 2010 |
|
RU2558023C9 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Манипулятор | 1980 |
|
SU910409A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| МАНИПУЛЯТОР АВТОСЦЕПКИ | 2010 |
|
RU2434734C1 |

18
a
15
26
2Z2 25
