Изобретение относится к технологическому оборудованию для производства изделий радиоэлектронной техники и может быть использовано в установках для взаимной ориентации и совмещения деталей, например подложки и. крышки микросборки при герметизации.
Известно устройство для совмещения деталей, содержащее следящую систему взаимного ориентирования и двухкоординатный механизм (1. Однако это устройство не позволяет получить требуемой точности прилегания жестких деталей по поверхностям разъема.
Известно устройство для совмещения деталей, содержащее расположенный на основании манипулятор с ориентиром и измерительный микроскоп 2 Это устройство также не позволяет получить требуемой точности прилегания поверхностей сопрягаемых деталей.
Известно также устройство для совмещения деталей, содержащее механизм переноса детали, подпружиненную головку, снабженную площадкой для установки и закрепления детали, плавающий вкладыш, установленный в корпусе, механизмы перемещения детали в двух взанмно перпендикулярных направлениях, механизм , угловых перемещений детали 3.
Это устройство рещает задачу регулирования положения переносной детали в двух взаимно перпендикулярных направлениях и по углу. Однако оно не позволяет компенсировать отиосительные пространственные перекосы деталей из-за погрещностей изготовления как устр йства для совмещения, так и деталей. Поэтому при совмещении двух деталей не удается добиться равиомериого их прилегания по поверх ностям разъема, а именно это важио, иапршикр, при совмещении крЫщки и подложки микросборки при герметизации.
Цель изобретения - обеспечение точности прилегания совмещаемых деталей - достигает ся тем, что в устройстве для совмещения деталей, сод.;ржащем механизм переноса деталей, корпус, в котором раоюложены мехаииз перемещения детали в двух взаимио перпекди
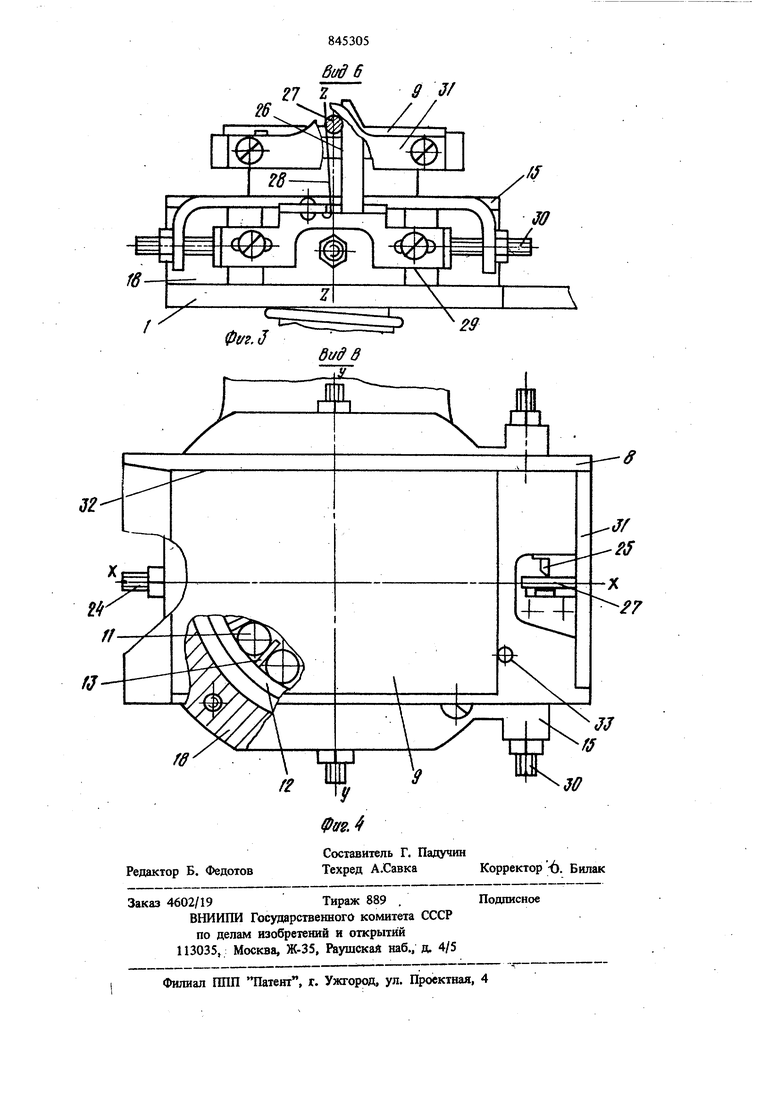
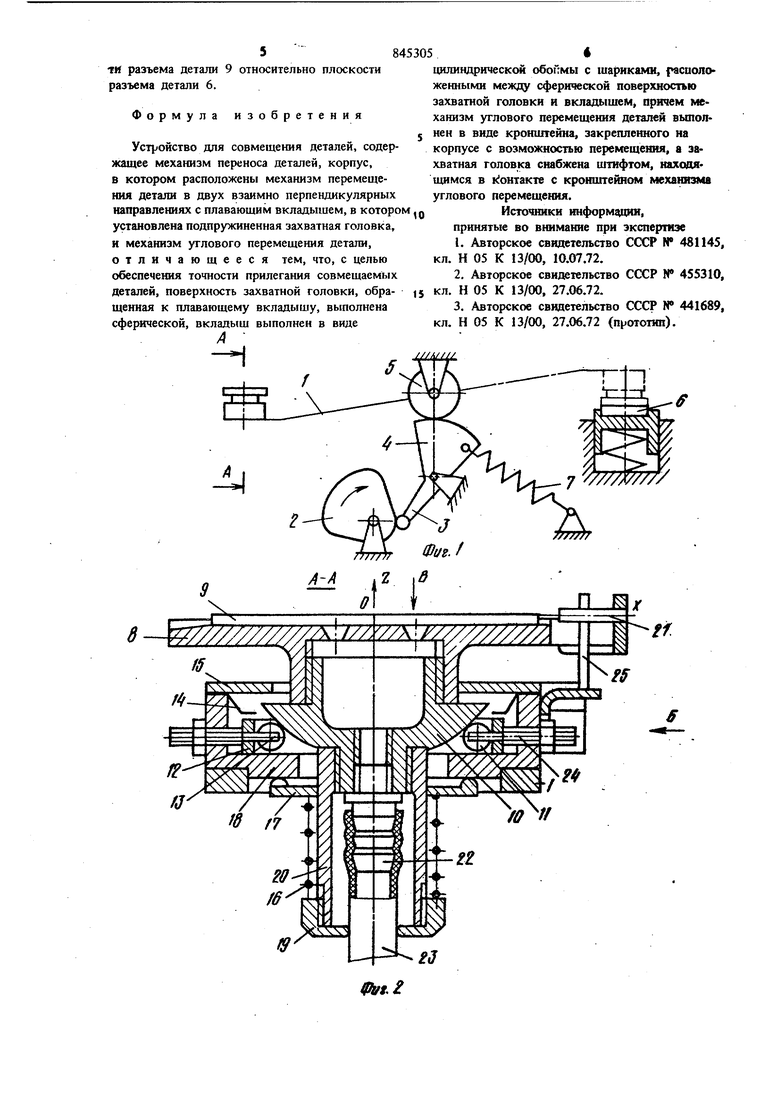
20 кулярных направлениях с плавающим вкладыщем, в котором устансшлены подпружкнешоя захватная головка и механизм углового перемещезшя детали. Поверхность захватной головкн. 3 обращенная к вкладышу, выполнена сферической, вкладыш вьтолнен в виде цилиндрической обоймы, с шариками, расположенными между сферической поверхностью захватной головки и вкладышем. Механизм углового перемешения детали выполнен в виде кронштейна, закрепленного на корпусе с возможностью перемещения, а захватная ,головка снабжена штифтом, находящимся в контакте с кронштейном механизма углового перемещения. На фиг. 1 изображена кинематическая схем механизма переноса; на фиг. 2 - устройство в разрезе; на фиг. 3 - вид устройства сбоку; на фиг. 4 - вид сверху. На рычаге 1 механизма переноса детали расположен ма1Шпулятор.Рычаг приводится в движение с помощью 1 лачка 2, толкателя и зубчатых колес 4, 5 для совмещения переносимой детали с деталью 6. Пружина 7 служит для возврата рычага 1 в исходное положе1ме. Манипулятор содержит захватную головку, которая состоит из плиты 8 для закрепления переносимой детали 9 и сферической детали 10, соединенных при помощи резьбы. Головка посредством шариков И установлена в плавающем вкладыше 12, который HMetT форму цилиндрической обоймы подшипника. оль сепаратора шариков 11 игр ют штифты 11. От вертикальных перемещений .вкладыш 12 зафиксирован пластинчатой пружи ной 14, которая крепится под крышкой 15. Пружина 16 посредством выступов диска 17 опирается на наружную поверхность корпуса is, а другам концом через гайку 19, втулку 20 прижимает сферическую деталь 10 к шарикам 11. Шарики опираются на внутреннюю поверхность корпуса 18 и плавающего вклады 12 и замыкают усилие пружины 16. Переносимая деталь 9 крепится вакуумными присосами 21 за счет отсоса воздуха из внутренней полости головки через щтуцер 22 и трубку 23. Вкладыш 12 зафиксирован во взаимно перпендикулярных направлениях двумя парами регулировочных винтов 24, образующих механизм п ремещения детали. От проворота головка зафиксирована регулируемым направляющим кронштейном 25, взаимодействующим своей направляющей поверхностью 26 со ийгифтом 27 при помощи пластинчатой пружшп 1 28, ко торая постоянно поджимает штифт 27, образу ющими механизм углового перемещения. Направляющий кронштейн 25 закреплен на корпусе 18 в пазах 29 и зафиксирован регулировочными винтами 30. Штифт 27 закреплен на головке при помощи планки ЗЬПереиосимая деталь 9 устанавливается до упора в бурт 32 и щтифт 33. Для совмещения предварительно сориентированных деталей одну из них переносят при вращении рычага 1. Настройка устройства для совмещения деталей осуществляется по эталонным деталям следующим образом. Переносимую -деталь 9 устанавливают на плите 8 и закрепляют вакуумными присосами 21, а затем совмещают с деталью 6 для ориен1ации.. Для ориентащ1и совмещенных деталей 6 и 9 в двух взаимно перпендикулярных направлениях вращают соответствующие пары винтов 24. При этом перемещается вкладыш 12, который через шарики И и сферическую деталь 10 сдвигает головку с деталью 9. Втулка 20 сдвигает диск 17, который скользит своими выступами по наружной поверхности корпуса 18. Ориентация совмещаемых деталей 6 и 9 по углу осуществляется направляющим кронштейном 25, который перемещают регулировочными винтами 30. Кронщтейн 25 своей направляющей поверхностью 26, контактирующей со штифтом 27, поворачивает головку вместе с переносимой деталью 9 вокруг вертикальной оси. Компенсация относительных пространствен ных перекосов плоскостей разъема совмещаемых деталей 6 и 9 для обеспечения их равномерного прилегания осуществляется в процессе работы устройства при совмещении каждой пары деталей. При этом втулка 20, поворачиваясь, сжимает пружину 16. Диск 17 охватывает втулку 20 с зазором, а следовательно, перемещаясь, скользит выступами по наружной поверхности корпуса 18 и не препятствует повороту втулки 20. Элементарные движения головки при этом можно рассматривать как вращение щтифта 27 вокруг оси Х-Х и враще1ше в плоскости, проходящей через ось щтифта 27, перпендикулярно плоскости разъема переносимой детали 9 (вокруг оси У-У). При этом штифт 27 поворачивается вокруг своей оси и перемещается по направляющей поверхности 26 направляющего кронштейна 25. Для того, чтобы в процессе компенсации перекосов не нарущалась взаимная ориентация деталей 6 и 9, ось щтифта 27 проходит через центр сфершЬской поверхности детали 10 и расположена в плоскости разъема детали 9, а направляющая поверхность 26 направляющего кронштейна 25 перпендикулярна шюскости разъема детали 9. Поэтому повороты головки вокруг Х-Х и У-У не вызывают как дополнительных поворотов головки в ПЛОСКОСТИ разъема детали 9 (вокруг оси Z-Z), так и ,допол1штельных линейных перемещений плоскоси разъема детали 9 относительно плоскости разъема детали 6.
Формула изобретения
,, ..
Устройство для совмещения деталей, содержащее механизм переноса деталей, корпус, в котором расположены механизм перемещения детали в двух взаимно перпендикулярных направлениях с плавающим вкладышем, в которо установлена подпружиненная захватная головка, и механизм углового перемещения детали, отличающееся тем, что, с цепью обеспечения точности прилегания совмещаемых деталей, поверхность захватной головки, обращениая к плавающему вкладышу, выполнена сферической, вкладыщ выполнен в виде А дщшиндрической обокмы с шариками, располсь женными между сферической поверхностью захватной головки и вкладыщем арнчем механизм углового перемещения деталей выполнен в виде крошитейна, закрепленного на корпусе с возможностью перемещения, а захватная головка снабжена штифтом, находящимся в Контакте с крошитейном механике углового перемещения.
Источники ниформадии, принятые во внимание при экспертизе
1.Авторское свидетельство СССР И 481145, кл. Н 05 К 13/00, 10.07.72.
2.Авторское свидетельство СССР N 455310, кл. Н 05 К 13/00, 27.06.72.
3.Авторское свидетельство СССР N 441689, кл. Н 05 К 13/00, 27.06.72 (прототип). ///. /////////л y/ f{{///// f5
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИНТОВОЙ МЕХАНИЗМ | 2002 |
|
RU2226246C2 |
| Устройство для контроля расположения пересекающихся осей отверстий в детали | 1987 |
|
SU1523887A2 |
| Направляющий механизм для цилиндра и цилиндр с направляющим механизмом | 2015 |
|
RU2679292C2 |
| Способ определения радиусов кривизны сферических поверхностей и устройство для его осуществления | 1988 |
|
SU1562691A1 |
| Схват | 1985 |
|
SU1289679A1 |
| Самоустанавливающаяся сборочная головка | 1986 |
|
SU1342658A1 |
| Манипулятор | 1985 |
|
SU1313691A1 |
| Адаптивная сборочная головка промышленного робота | 1988 |
|
SU1618561A1 |
| Устройство для обработки фасок на седлах клапанов | 1989 |
|
SU1741974A1 |
| Инструмент для обработки оптических деталей | 1983 |
|
SU1093500A2 |