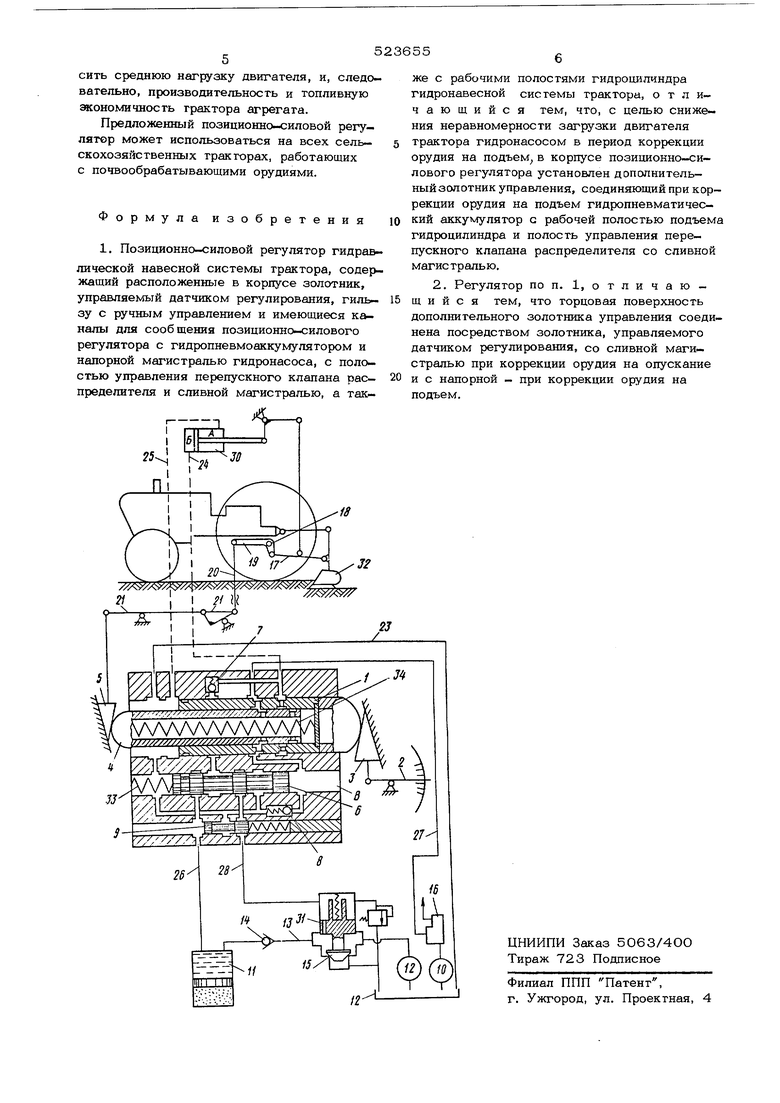
расположены обратный клапан 7 и предохранительные клапаны 8 и 9 гидронасоса 10 и гпдропневмоаккумулятора 11.
Блок питания позиционно-силового регулятора включает основной насос 12, пред- назначенный для подъема навесного орудия при ручном управлении и для подзарядки аккумулятора 11, соединенный с последним напорной магистралью 13 через обратный клапан 14 и со сливной магистралью - через перепускной клапан 15 распределителя; дополнительный насос 10 небольшой производительности с делителем потока 16, предназначенным для обслуживания гидроусилителя руля трактора и управления золотником 6 гидропневматического аккумулятора 11.
Силовой датчик с механизмом обратной связи позиционко-силового регулятора имеет привод от нижних тяг 17 и включает торсион 18 с рычагом 19, тягу 20 и рычаги 21 и 22.
Системой магистралей 23 - 28 позицион- но-силовой регулятор 5 соединен с масляным резервуаром 29, рабочими полостями опускания А и подъема Б гидроцилиндра 30 гидропневмоаккумулятором 11, делителем потока 16 и каналом управления 31 перепускного клапана 15. Магистраль 27 ( в показанном на чертеже положении золотника 4) одновременно соединена со сливом и торцовой полостью В золотника 6.
Позиционно-силовой регулятор при силово регулировании работает следующим образом.
Для опускания орудия 32 устанавливают рукоятку 2 в положение, соответствующее заданной глубине обработки почвы. Полости А и Б гидроцилиндра ЗО через магистрали 25 и 24, проточки и отверстия в гильзе 1 и золотник 4 регулятора соединяются со сливной магистралью 23, при этом орудие 32 опускается.
По мере заглубления орудия 32 в почву его возрастающее сопротивление воздейству ет через нижние тяги 17 на торсион 18, деформация которого передается на золотник 4 регулятора. Заглубление длится до тех пор, пока магистраль 24 пе перекроется золотником 4 регулятора от сливной ма- гистрали 23, а полость Б гидроцилиндра 30 не будет заперта (как показано на чертеже). Магистраль 27 в этом случае остается соединенной с резервуаром 29, золотник 4 будет находиться в нейтральном положении. Соединение магистрали 27 со сливом приводит к падению давления масла в полос ти В, в результате чего пружина 33 переместит золотник 6 в нейтральное положение, показанное на чертеже. Магистрали 26 и 28, соединяющие гидропневмоаккумулятор 11с гидроцилиндром 30 и канал управления 31 перепускного клапана 15 со сливом будут перекрыты. Перепускной клапан 15 закроется, а масло, нагнетаемое насосом 12 будет поступать в гидропневматический аккумулятор 11.
Для ограничения предельной величины зарядки гидропневматического аккумулятора 11 золотниковый предохранительный клапан 9 при достижении максимального давлвгния в аккумуляторе, соединит магистраль 28 со сливом, минуя золотник 6, перепускной клапан 15 поднимается, и масло от гидронасоса 12 пойдет на слив.
При уменьшении сопротивления орудия 32 золотник 4 под действием пружины 34 переместится влево, соединив полость Б гидроцилиндра 30 через магистраль 24 со сливом. Будет осуществляться коррекция на опускание орудия 32, а в случае необходимости и подзарядка гидропневмоаккумулятора 11, как и при нейтральном положении золотника 4 резгулятора.
При увеличении глубины обработки и сопротивления орудия 32 от заданного значения золотник 4 переместится вправо и перекроет магистраль 27 от сливной магистрали 23, давление масла в полости В резко возрастет, золотник 6 передвинется влево, масло от гидропневмоаккумулятора 11 через магистраль 26, каналы в корпусе регулятора обратный клапан 7 и магистраль 24 поступит в полость Б Гидроцилиндра 30. В результате этого произойдет коррекция на подъем орудия. Насос 12 в данныймомент времени, в отличие от известных гидросистем с силовым регулятором , работает вхолостую так как канал управления 31 соединен со сливом, а перепускной клапан 15 поднят.
Наличие золотника 6 управления аккумулятора позволяет осуществлять коррекцию на подъем орудия 32 за счет энергии гидропневмоаккумулятора 11 и одновременно при этом переводить работу гидронасоса 12 в режим безнапорного перепуска. Это исключает дополнительный расход энергии двигателя на работу гидронасоса 12 под нагрузкой при коррекции на подъем орудия 32 в момент, совпадающий по времени с возросшим сопротивлением последнего. Зарядка же гидропневмоаккумулятора 11 осуществляется при заданном положении орудия 32 или коррекции на его опускание, т. е. при некоторой недогрузке двигателя трактора. Все это наряду с уменьшением неравномерности загрузки двигателя позволяет повы
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлическая система управления сельскохозяйственными орудиями | 1986 |
|
SU1429959A1 |
| Гидравлическая система управления навесными сельскохозяйственными орудиями | 1975 |
|
SU668636A1 |
| Гидравлическая система управления сельскохозяйственными орудиями | 1988 |
|
SU1538909A2 |
| Гидросистема управления сельскохозяйственными орудиями | 1988 |
|
SU1618301A1 |
| Регулятор гидросистемы управления положением рабочего органа сельскохозяйственной машины | 1989 |
|
SU1701135A1 |
| Регулятор гидросистемы управления сельскохозяйственными орудиями | 1990 |
|
SU1764533A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ НАВЕСНЫМИ ОРУДИЯМИ СЕЛЬСКОХОЗЯЙСТВЕННОГО ТРАКТОРА | 1970 |
|
SU280074A1 |
| Гидравлическая система управления навесными сельскохозяйственными орудиями | 1973 |
|
SU441880A1 |
| Регулятор гидросистемы управления сельскохозяйственными орудиями | 1989 |
|
SU1681748A1 |
| Гидравлическая система управления навесными орудиями трактора | 1972 |
|
SU441881A1 |
