1
Изобретение относится к области систем автоматического управления и регулирования и может быть использовано при построении прецизионных двухканальных следящих приводов с силовым опорным каналом.
Известны двухканальные следящие приводы с силовым опорным каналом.
Двухканальный следящий привод содержит два канала: управляемый и опорный, каждый из которых состоит из последовательно включенных чувствительного элемента, сумматора, усилителя, двигателя. Выходы двигателей соединены с входами механического дифференциала, который через редуктор и нагрузку соединен с чувствительным элементом Щ .
Невысокая точность работы привода обусловлена отсутствием сигналов, пропорциональных производным от входной координаты, которые обеспечивали бы компенсацию составляющих ошибки следяшего привода.
Наиболее близким техническим решением к данному изобретению является двухканаль- ный следящий привод, содержащий последовательно соединенные первый чувствнтельный элемент, первый сумматор, один из входов которого соединен с выходом первого источника опорного сигнала, первый усилитель, первый двия атель и последовательно соединенные второй источник опорного сигнала, второй сумматор, второй усилитель второй двигатель. Выходы первого и второго двигателей соединены с входами дифференциала, выход которого через последовательно соединенные редуктор и нагрузочный элемент соединен с вторым входом чувствительного элемента 2.
Однако в таком приводе скорость двигателя опорного канала определяется результатом скорости двигателя управляемого канала, что отрицательно сказывается на плавности движения выходного вала дифференциала.
Целью изобретения является повышение точности и плавности работы двухканального следящего привода.
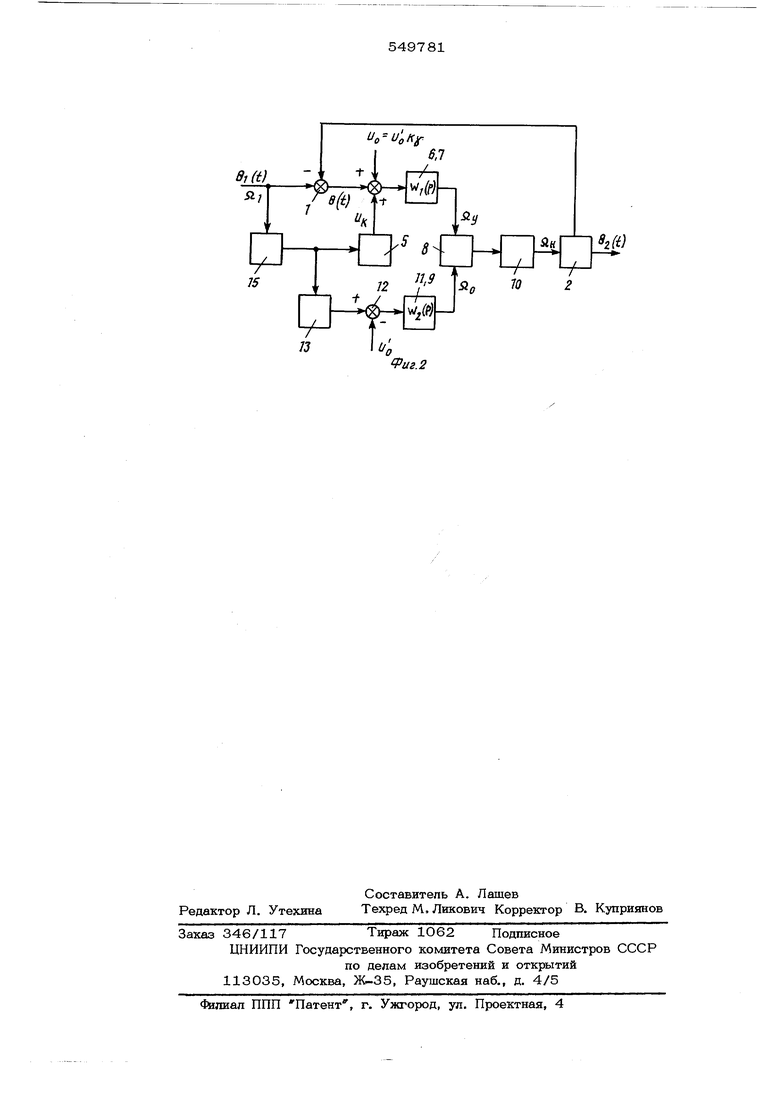
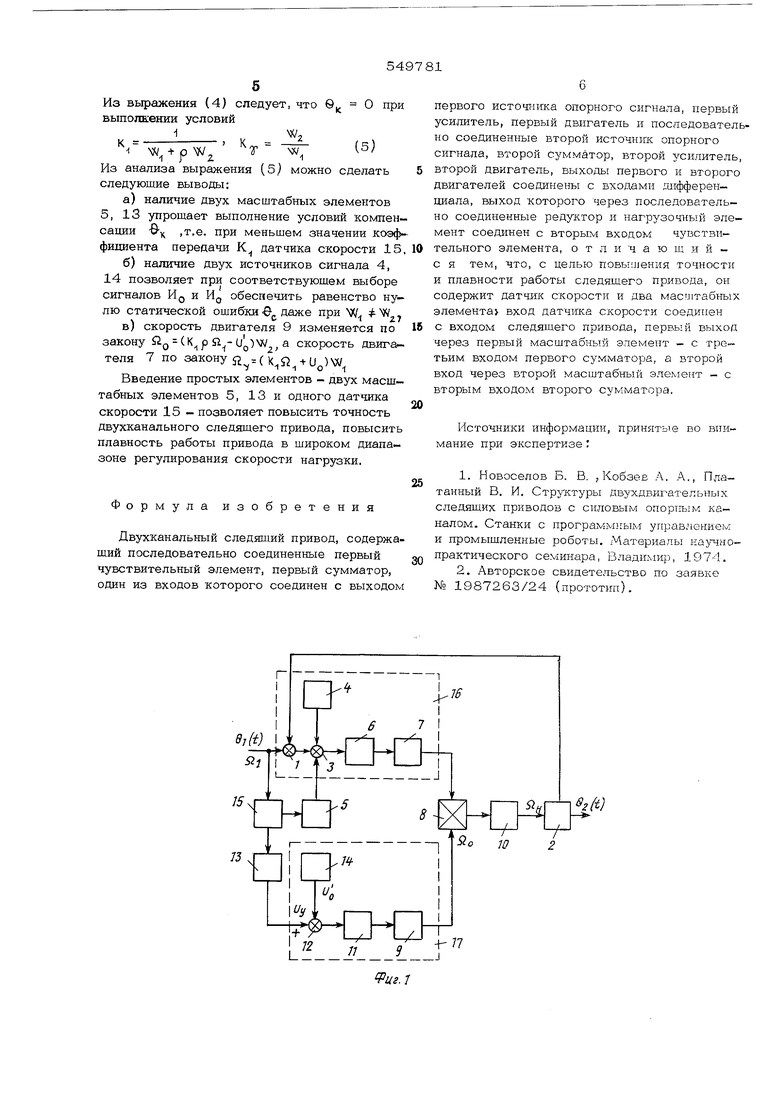
Эта цель достигается тем, что предложенный Двухканальный следящий привод содержит датчик скорости и два масштабных элемента. Вход датчика скорости соединен со входом следящего привода, первый выход через первый масштабный элемент - с третьим входом первого сумматора, а второй вход через второй масштабный элемент-со вторым входом второго сумматора. На фиг. 1 представлена блок-схема, на фиг. 2 - структурнаа схема двухканального следящего привода, где приняты следующие обозначения; 6(i) 82.Ctlj6jC-t) - соответственно входная и выходная величины и ощибка привода, Й(t),йу(-DjSgttjjS C-l).-скорости: задаваемая, управляемого и опорного каналов и нагрузки; и.,, и - соответственно компенсирующий и управляющий сигналы, снимаемые с выходов масштабных элементов;1(Р)Х2Ф), - передаточные функции СОответственно последовательно соединенных первого усилителя и первого двигателя,последовательно соединенных второго усилителя и второго двигателя ,датчика скорости,пер вого и второго масштабных элементов; К - коэффициент масштабирова ния опорного канала. Предлагаемая схема двухканального следящего привода (ДКСП) состоит из чувстви тельного элемента 1, на первый вход кото- рого поступает входная величина в (i) привода, а второй вход соединен с выходом нагрузочного элемента (нагрузки 2. Выход элемента 1 соединен с первым входом сумматора 3, второй вход которого соединен с выходом источника опорного канала 4, третий вход - с выходом масштабного элемента 5, а выход - со входом усилителя 6. Вы ход усилителя 6 соединен со входом двигателя 7, выход которого соединен с первым входом дифференциала 8. Второй вход дифференциала 8 соединен с выходом двигателя 9, а выход - со входом редуктора 10, выход которого соединен со входом нагрузки 2. Вход двигателя 9 соединен с выходом усилителя 11, вход которого соединен с вы ходом сумматора 12, первый вход которого соединен с выходом масштабного элемента 13, а второй вход - с выходом источника опорного сигнала 14. Вход элемента 5 соединен с первым выходом датчика скорости 15, второй выход которого соединен со вхо дом масштабного элемента 13, а вход со входом следящего привода. Элементы 1,3,4, 6 и 7 образуют управляемый канал 16, а элементы 14, 12, 11 и 9 - опорный канал 17. Привод работает следующим образом. При отсутствии сигнала 0- (-t) за счет сигналов UQ с источника 4 и HQ с исто ника 14 двигатели 7, 9 вращаются со ско. ростями52.,, о , равными по величине, но противоположными по знаку. Отходной вал дифференциала 8, а следовательно, и нагрузка 2 неподвижны. При изменении входного сигнала Q-(i) с постоянной скоростью Si датчик 15 вырабатывает сигнал, который, масштабируясь в масштабных элементах 5, 13, поступает на входы сумматоров 3, 12. Сигнал (J с элемента 5 компенсирует составляющую ошибки ©(i:) привода, пропорциональную скорости 51. Сигнал Uy с элемента 13 совместно с сигналом И с источника 14 так управляет двигателем 9, что при увеличении скорости Siy скорость йо уменьшается и наоборот. Такой закон управления двигателями 7, 9 обеспечивается тем, что сигналы Ид и Uj складываются, а сигналы И и U вычитаются. Рассмотрим условия, обеспечивающие компенсацию составляющей ошибки вЙ)следяще- го привода, и покажем необходимость ввода двух масштабных элементов 5, 13. Допустим, что дифференциал 8 осуществляет простое суммирование согласно структурной схеме (фиг. 2), имеем e-2(t)(,-9-pW(p)+U;3K W(p)(p),x (/2Ср)(р)П) Из выражения (1) получим зависимость для ошибки привода при условии, что К К о . - -UoKyW(p)-moW(p)(p)(p)3 1 vv Ср) Пустьw W, . я р -Тйтт; тогда из выражения (2) получим .)- K,p-Q, w,(-|.Tap .) p(i-V() ,KyO- TgpVW2(-i4T,pj(3) рО-т рХ1-т;р)Д4. При -9(i) 5i,,t т.е. при изменении входной величины &(-t)c постоянной скоростью, можно из выражения (3J определить составляющую в| ошибки в „ Я,-K,a,(W,p(/zVUoCW Kт-Wд) , . Из выражения (4) следует, что © О при выполкении условий W, + р W Из анализа выражения (5) можно сделать следующие выводы: а) наличие двух масштабных элементов 5, 13 упрощает выполнение условий кo /шeнсации -S- ,т,е. при меньшем значении коэффициента передачи К датчика скорости 15, б)наличие двух источников сигнала 4, 14 позволяет при соответствующем выборе сигналов Ид и HJ обеспечить равенство нулю статической ощибки & даже при W ,7 в)скорость двигателя 9 изменяется по закону Лд - СК р (JQ)W а скорость двигателя 7 по закону J()W Введение простых элементов - двух масштабных элементов 5, 13 и одного датчика скорости 15 - позволяет повысить точность двухканального следящего привода, повысить плавность работы привода в щироком диапазоне регулирования скорости нагрузки. Формула изобретени Двухканальный следящий привод, содержащий последовательно соединенные первый чувствительный элемент, первый сумматор, один из входов которого соединен с выходом первого источника опорного сигнала, первый усилитель, первый двигатель и последовательно соединенные второй источник опорного сигнала, второй сумматор, второй усилитель, второй двигатель, выходы первого и второго двигателей соединены с входами дифференциала, выход которого через последовательно соединенные редуктор и нагрузочный элемент соединен с вторым входом чувствительного элемента, отличающийс я тем, что, с целью повышения точности и плавности работы следящего привода, он содержит датчик скорости и два масштабных элемента} вход датчика скорости соединен с входом следящего привода, первьй выход через первый масщтабный элемент - с третьим входом первого сумматора, а второй вход через второй масштабный элемент - с вторым входом второго сумматора. Источники информации, принятые во внимание при экспертизе: 1.Новоселов Б. В. , Кобзев А. А., Платанный В. И. Структуры двухдвигательных следящих приводов с силовым опортгым каналом. Станки с программным управлением и промыщленные роботы. Материалы каучнопрактического сехаинара, Владимир, 1974. 2.Авторское свидетельство по заявке № 1987263/24 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухканальный следящий привод | 1975 |
|
SU572754A1 |
| Трехканальная следящая система | 1989 |
|
SU1716479A1 |
| Двухканальная следящая система комбинированного регулирования | 1974 |
|
SU498603A1 |
| Двухдвигательный следящий привод | 1975 |
|
SU742867A1 |
| Двухканальный следящий привод | 1975 |
|
SU809050A2 |
| Двухканальный следящий привод | 1974 |
|
SU515083A1 |
| Двухканальный следящий привод | 1975 |
|
SU661498A1 |
| Двухканальная следящая система | 1973 |
|
SU446027A1 |
| Следящий привод | 1974 |
|
SU641393A1 |
| Двухканальный следящий привод | 1973 |
|
SU497558A1 |