1
Изобретение относится к области систем автоматического регулирования.
Известна двухканальная следящая система комбинированного регулирования, содержащая силовой привод, состоящий из последовательно соединенных чувствительного элемента, сумматора, силового узла управляемого канала, дифференциала и нагрузочного элемента, связанного с измерителем рассогласования, источника опорного напряжения, силового узла и опорного капала, и корректирующий привод, состоящий из последовательно соединенных измерителя рассогласования, сумматора, усилителя, исполнительного двигателя, дифференциала, выход которого связан с измерителем рассогласования, и элемента сравнения.
В такой системе скорости перемещения валов дифференциала вычитаются и скорость перемещения нагрузки определяется их разпостью. Скорость опорного канала строго фиксирована и определяется значением напряжения с источника эталонного напряжения.
Для выработки компенсирующего сигнала по первой производной от входного сигнала системы применяется корректирующий привод, который выполпен по двухканальной структуре и состоит из управляемого канала, содержащего чувствительный элемент, сумматор, силовой узел управляемого канала, дифференциал, и опорного канала, содержащего источник эталонного напряжепия и силовой узел опорного канала. На выходах силовых узлов управляемого и опорного каналов устаповлены тахогенераторы, сигналы с которых вычитаются на сумматоре. Выработка компенсирующего сигнала с помощью корректирующей системы позволяет получить сигнал в щироком диапазоне изменения входной величины; использовать характеристики тахогеператоров на паилучщих их участках; обеспечить необходимую фильтрацию входной величины.
Однако наличие двух каналов в такой корректирующей системе усложняет ее техническую реализацию. Кроме того, изменение параметров силового привода не учитывается корректирующим приводом, что может привести к увеличению ощибки системы из-за ее недокомпенсации или перекомпенсации компенсирующим сигналом.
Целью изобретения является повьпнение точности работы системы.
Эта цель достигается тем, что в силовой привод введен тахогенератор, вход которого соединен с выходом силового узла опорного капала, механически связанного с одним из входов дифференциала корректирующего привода, а выход - с одним из входов сумматора корректирующего привода.
Это позволяет упростить реализацию корректирующего привода и иовысить точность работы системы при изменеиии внешних условий и параметров силового привода.
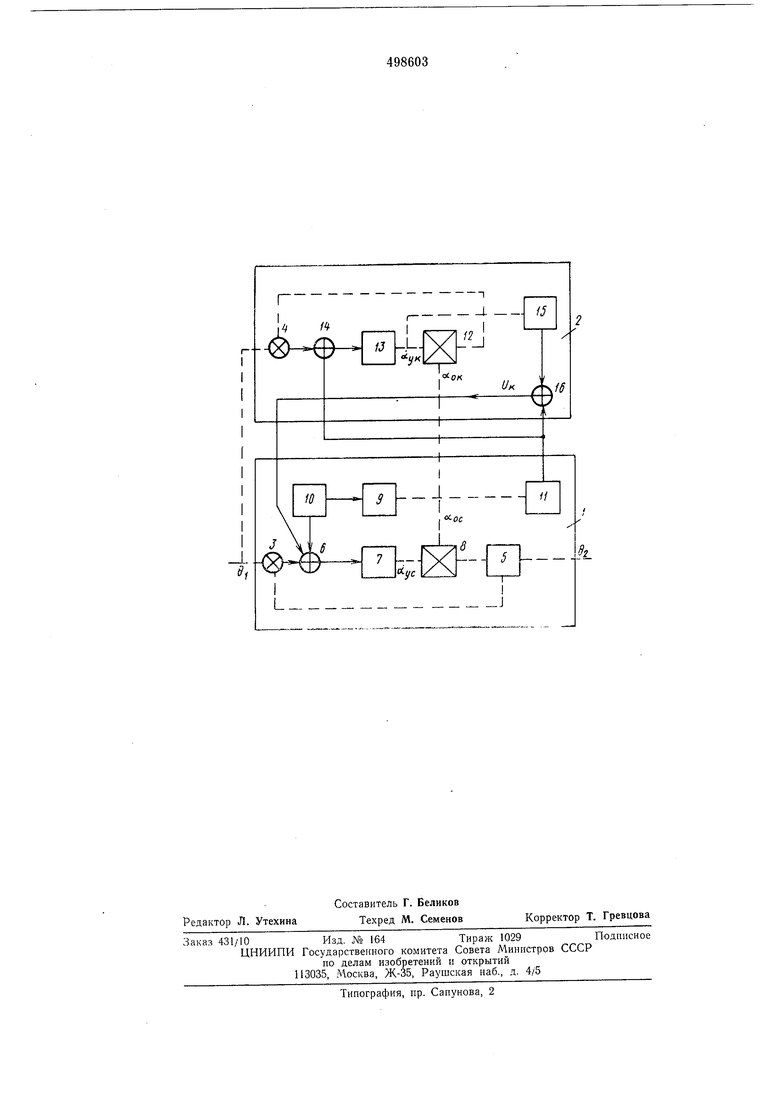
На чертеже представлена блок-схема предлагаемой системы, где обозначены вь ва - входная и выходная величины системы, соответственно; в - ошибка системы; UK - компенсирующий сигнал; аук, «ок-скорости вращения соответствующих входных валов дифференциала корректирующего привода и ,аус, ссос - скорости вращения соответствующих валов дифференциала силового привода.
Предлагаемая система состоит из силового 1 и корректирующего 2 приводов. На одни входы чувствительных элементов (элементов сравнения) 3, 4 силового 1 и корректирующего 2 приводов соответственно поступает входная величина вь Второй вход элемента 3 соединен с выходом нагрузочного элемента 5, а выход - с первым входом сумматора 6 привода 1. Выход сумматора 6 соединен со входом силового узла 7 управляемого канала (состоящего из усилителя и исполнительного двигателя) привода 1. Выход узла 7 соединен с одним из входов дифференциала 8 привода 1. Выход дифференциала 8 соединен со входом нагрузочного элемента 5. Второй вход дифференциала 8 соединен с выходом силового узла 9 опорного канала (состоящего из усилителя и исполнительного двигателя) привода 1. Вход узла 9 соединен с выходом источника опорного напряжения 10, второй выход которого соединен с одним из входов сумматора 6. Выход силового узла 9 соединен со входом тахогенератора 11 и одним из входов дифференциала 12 привода 2, второй вход которого соединен с выходом силового узла 13 привода 2. Вход силового узла 13 соединен свыходом сумматора 14, один вход которого соединен с выходом чувствительного элемента 4, а второй - с выходом тахогенератора И. Выход дифференциала 12 соединен с одним из входов чувствительного элемента 4. Выход силового узла 13 соединен со входом тахогенератора 15, выход которого соединен с одним из входов сумматора 16, второй вход которого соединен с выходом тахогенератора 11, а выход - с одним из входов сумматора 6.
Система работает следующим образом.
При отсутствии входного сигнала в, на входах элементов 3, 4 за счет сигнала с источника 10 двигатели силовых узлов 7, 9 вращаются с определенной скоростью, но в различных направлениях. Элемент 5 неподвижен. Один из валов дифференциала 12, соединенный с выходом узла 9, вращается с определенной скоростью в одном направлении, а второй вал за счет сигнала с тахогенератора И - в другом направлении. Выходной вал дифференциала 12 неподвижен. Тахогенераторы 15 и 11 вращаются с одинаковой скоростью, но в различных направлениях. Сигнал UK на выходе сумматора 16 отсутствует.
При подаче сигнала Oi на вход системы, т. е. на входы элементов 3, 4 скорости «хк и ttxc отличаются от скоростей аос и «р. Элемент 5 за счет разности скоростей (осус-(Хоо) начинает вращаться, а на выходе сумматора 16 появляется за счет разности скоростей тахогеиераторов 11 и 15 («ос - ссук) сигнал к, компенсирующий ошибку в привода 1.
Ф о р м у л а изобретен и я
Двухканальная следяи;ая система комбинированного регулирования, содержащая силовой привод, состоящий из последовательно соединенных чувствительного элемента, сумматора, силового узла управляемого канала, дифференциала и нагрузочного элемента, связанного с измерителем рассогласования, источника опорного напряжения, силового узла опорного канала, и корре стирующий привод, состоящий из последовательно соединенных измерителя рассогласования, сумматора, усилителя, исполнительного двигателя, дифференциала, выход которого связан с измерителем рассогласования, и элемента сравнения, от л ичающаяся тем, что, с целью повыщения точности работы, в силовой привод введен тахогенератор, вход которого соединен с выходом силового узла опорного канала, механически связанного с одним из входов дифференциала корректирующего привода, а выход - с одним из входов сумматора корректирующего привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухканальный следящий привод | 1973 |
|
SU497558A1 |
| Следящий привод | 1977 |
|
SU857924A1 |
| Двухканальная следящая система | 1973 |
|
SU446027A1 |
| Следящий привод | 1974 |
|
SU550630A1 |
| Двухканальный следящий привод | 1974 |
|
SU515083A1 |
| Двухканальный следящий привод | 1975 |
|
SU809050A2 |
| Двухканальный электромашинный следящий привод | 1973 |
|
SU492850A1 |
| Следящая система | 1980 |
|
SU885970A1 |
| Двухканальный следящий привод | 1975 |
|
SU549781A1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |