Изобретение относится к автоматике и предназначено для применения в системах автоматического регулирования (САР).
Известен способ коррекции нелинейной системы автоматического регулирования, основанный на выделении сигнала разности между сигналом ошибки системы и сглаженным сигналом этой ошибки с последующим формированием корректируюш,его импульса и суммированием его с сигналом ошибки.
Одна-ко этим способом коррекции невозможио устранить колебательные процессы нелинейной системы в установившемся режиме в интервалах между моментами выявления неравнозначности входного и выходного сигналов.
Как известно, колебательные процессы в установившемся режиме являются одним из основных источников динамической ошибки САР. Это ограничивает область применения САР.
Цель изобретения - увеличение точности и уменьшение колебательности системы автоматического регулирования.
Эта цель достигается тем, что начало корректирующего имлульса формируют в момент возникновения сигнала разности, измеряют скорость изменения сигнала разности, сравнивают величину полученной скорости с опорным напряжением, знак которого и знак кор2
ректирующего импульса устанавливают равным знаку скорости изменения сигнала рааности, и в момент равенства скорости измене.ния сигнала разности величине опорного напряжения заканчивают формирование корректирующего имлульса.
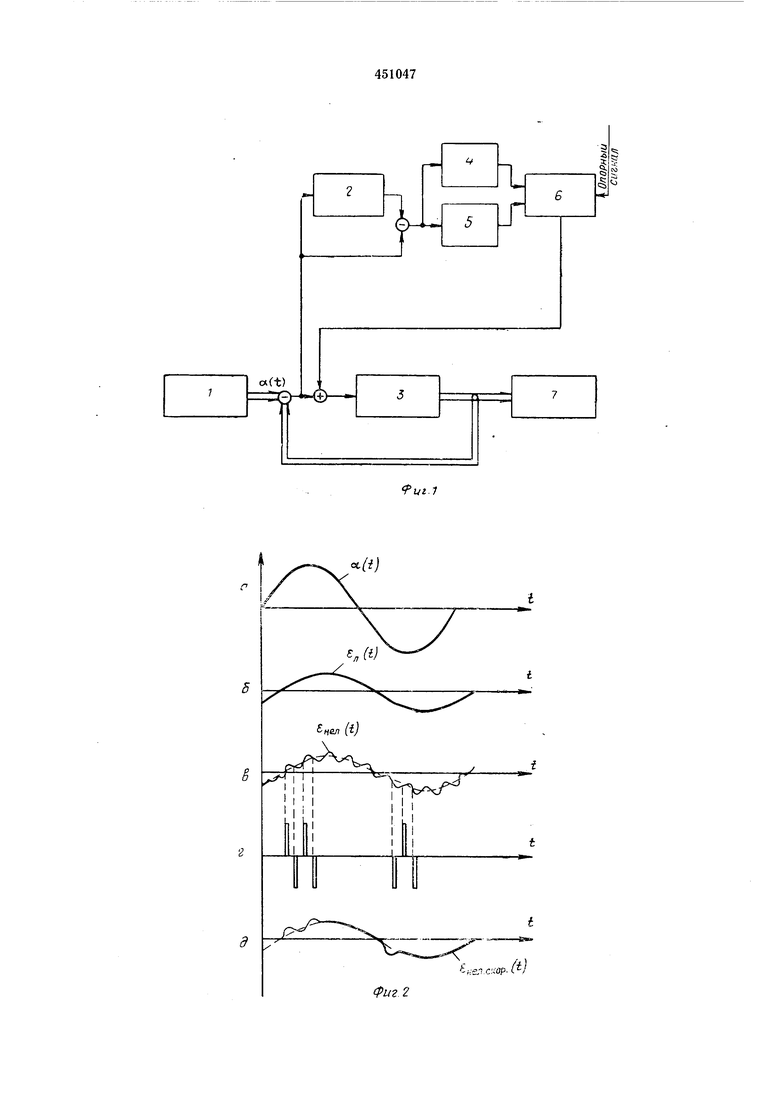
На фиг. 1 изображена блох-схема устройства, реализующего предлагаемый способ коррекции нелинейной САР; на фиг. 2 - временные диаграммы работы устройства, где приняты следующие обозначения: 2а - кривая задающего воздейств-ия а(); 26 - кривая ошибки линейной системы (сглаженная кривая ошибки нелинейной системы) e.-i(t); 2в - кривая ошибки нелинейной системы eae:i(t), 2г - корректирующие импульсы; 2д - кривая ощибки нелинейной систе.мы, скорректированной предлагаемым способом, еиелскор(0Устройство содержит задающий блок 1, сглаживающий фильтр 2, корректируемую систему 3, нуль-орган 4, дифференцирующее звено 5, формирователь корректирующих импульсов 6 и объект управления 7.
Пусть, например, объект управления 7 должен с высокой точностью отслеживать движение задающего блока 1 по закону а(). Система замкнута по углу и при слежении имеет динамическую ошибку (кривая енел(0. 2в). Величина и форма динамической ошибки зависит от вида управляющего воздействия и
параметров системы. Если система линейная, т. е. отсутствуют люфт, зона нечувствительности и др., то динамическая ошибка имеет гладкий характер нри гладком управляющем воэдействии (кривая ел(О, 26). Однако электромеханических линейных систем практически не сущест1вует.
В нелинейных системах на динамическую ошибку накладываются автоколебания, вызванные нелинейностью системы (кривая выел (0. 2в). Экспериментальные и теоретические исследования показали, что эти колебания накладываются на всю кривую изменения динамической ошибки и имеют максимальные значения в .моменты максимальных ускорений объекта управления.
Эти автоколебания суш,ественно увеличивают динамическую ошибку системы.
Для компенсации автоколебаний сглаживаюш.ий фильтр 2, в качестве которого могут служить сглаживаюш,ие фильтрующие устройства или линейная модель системы, формирует сглаженный сигнал ошибки (кривая 8л(0. 26). Далее кривые {emn(t), 2в и 8л(О. 26) сравниваются. В момент отклонения кривой 8нел(0 от 8л (О вызванного колебательным процессом, который фиксируется нуль-органом 4, формируется корректирующий импульс в формирователе имлульсов 6. Этот импульс, поступая в систему, противодействует отклонению объекта управления 7, вызванному колебательным процессом. Длительность имлульса определяется по результату сравнения текущего значения скорости этого отклонения с опорным сигналом. Чем больше скорость отклонения, тем дольше необходимо дейст|вовать на объект управления для компенсации отклонения. Для Исключения перерегулирования в результате действия корректирующего импульса, последний отключается не при нулевом значении скорости отклонения, а с упреждением. Величина этого упреждения задается опорным сигналом, а величина опорного сигнала зависит от параметров корректируемой системы. Текущее значение скорости отклонения формируется дифференцирующим звеном 5.
Таким образом, предлагаемый способ позволяет компенсировать колебания нелинейной системы во всем диапазоне изменения динамической ошибки и существенно повышает точность нелинейных систем по сравнению с известным, что расширяет область его применения.
Предмет изобретения
Способ коррекции нелинейной системы автоматического регулирования, основанный на выделении сигнала разности между сигналом ошибки системы и сглаженным сигналом этой ошибки с последующим формированием корректирующего импульса и суммированием его с сигналом ошибки, отличающийся тем, что, с целью увеличения точности и уменьшения колебательности системы автоматического регулирования, начало корректирующего импульса формируют в момент возникновения сигнала разности, измеряют скорость изменения сигнала разности, сравнивают величину полученной скорости с опорным напряжением, знак которого и знак корректирующего импульса устанавливают равным знаку скорости изменения сигнала разности, и в момент равенства скорости изменения сигнала разности величине опорного напряжения заканчивают формирование корректирующего импульса.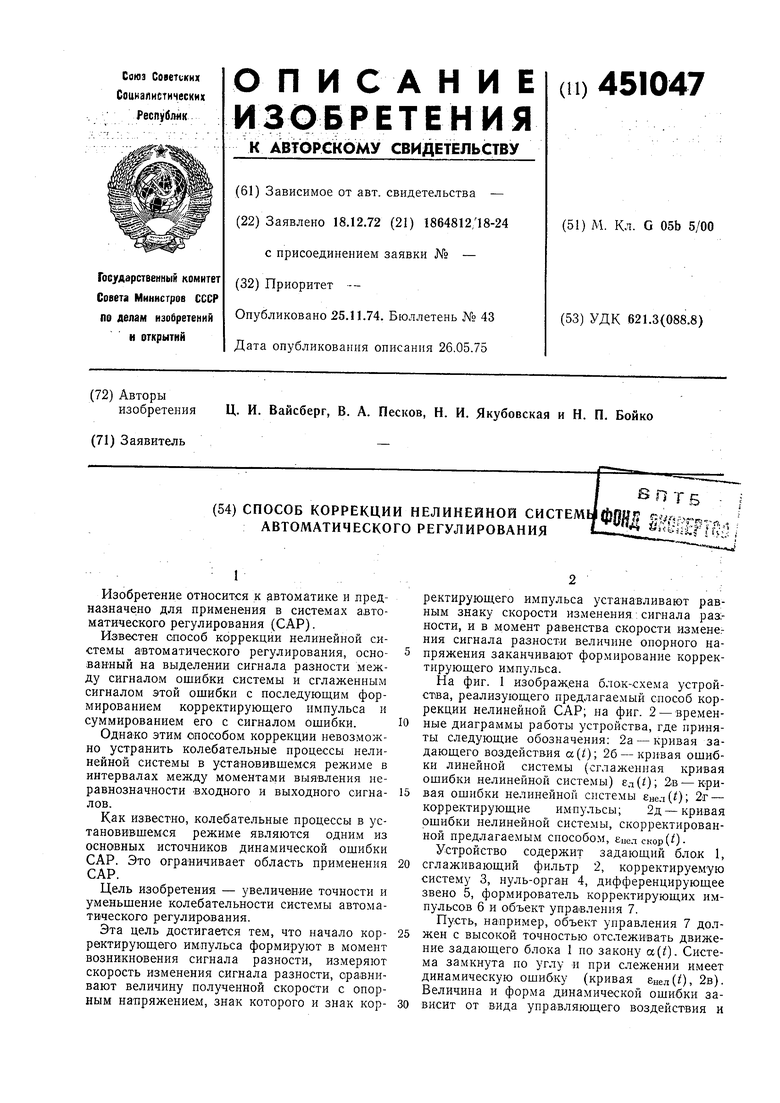
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления | 1972 |
|
SU446031A1 |
| Способ управления системой с нелинейной коррекцией | 1974 |
|
SU526856A1 |
| Система автоматического управления | 1975 |
|
SU525920A1 |
| Нелинейное корректирующее устройство | 1989 |
|
SU1734070A1 |
| Способ коррекции систем автоматического управления движением объекта | 1975 |
|
SU624202A1 |
| Способ расширения диапазона регулирования АСР без потери устойчивости | 2016 |
|
RU2619746C1 |
| Способ нелинейной коррекции системы стабилизации инерционного объекта | 1975 |
|
SU620938A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2509328C2 |
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114455C1 |