Изобретение относится к механизмам управления манипуляторами.
Известны устройства для управления манипулятором, выполненные в виде шарнирно соединенных звеньев.
В предлагаемом устройстве с целью ограничения угла между звеньями на шарнирах, связывающих эти звенья, установлены блоки равного диаметра, через которые в одном направлении запасован гибкий элемент, одним концом жестко закрепленный на первом звене, а другим концом соединен со вторым звеном с номощью пружины через ограничитель хода, взаимодействующий с упором, установленным на этом звене.
На чертеже изображено предлагаемое устройство.
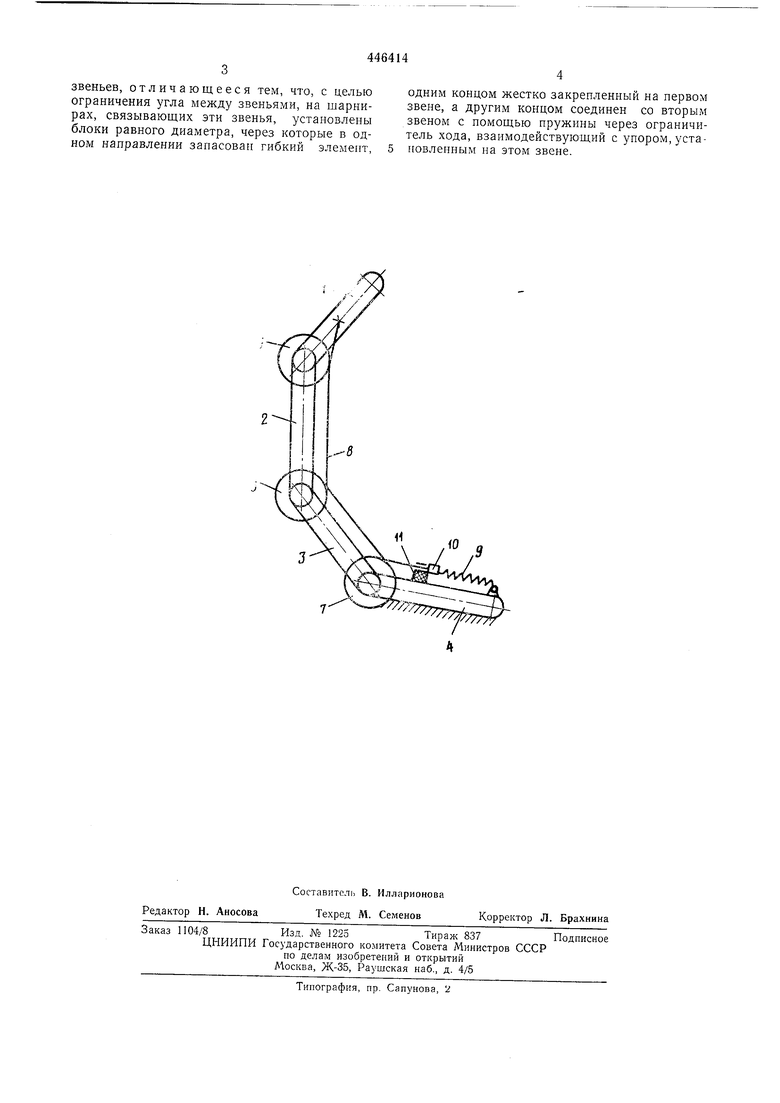
Оно состоит из шарнирно сочлененных звеньев 1-4. Звено 4 является неподвижным основанием. Датчики угловых положений звеньев так же, как и манипулятор с системой управления, которым управляют рукояткой, на чертеже не показаны.
На шарнирах соединения звеньев установлены направляющие блоки 5-7 равного диаметра. Трос 8 крепится на звене 1 и последовательно огибает направляющие блоки 5-7 в одном направлении и прикрепляется к пружине 9, закрепленной на звене 4. На тросе 8 укреплен ограничитель 10 хода, а на звене 4
установлен упор 11. Звенья 1 и 4 расположены иод максимально возможным углом.
Работу устройства для управления манипулятором рассмотрим на примерах.
Пусть звенья 2 и 3 неподвижны, тогда звено 1 может поворачиваться только по часовой стрелке, в сторону уменьшения угла между звеньями 1 и 4, и при этом происходит отход ограничителя 10 от упора 11. Если теперь рукоятка управления получит такое движение, что угол между звеньями 2 и 3 будет постоянным, а звено 3 будет вращаться но часовой стрелке, то произойдет уменьшение угла между звеньями 1 и 4. Избыток троса позволит звену 1 повернуться против часовой стрелки из-за того, что трос 8 уменьшил угол обхвата блока 7. Однако при равенстве диаметров блоков 5 и 7 величина поворота не превышает величины уменьшения угла между звеньями 1 и 4, то есть и в этом случае угол между ними не превышает заданной величины.
Диалогичные результаты получают при рассмотрении относительного движения звеньев 2 и 3 или совместного произвольного движения всех звеньев рукоятки.
Предмет изобретения
Устройство для управления манипулятором, выполненное в виде шарнирно соединенных
звеньев, отличающееся тем, что, с целью ограничения угла между звеньями, на шарнирах, связывающих эти звенья, установлены блоки равного диаметра, через которые в одном направлении запасова гибкий элемент,
одним концом жестко закрепленный на первом звене, а другим концом соединен со вторым звеном с помощью пружины через ограничитель хода, взаимодействующий с упором, установленным на этом звене.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР ДЛЯ МОНТАЖНЫХ И ПОГРУЗОЧНО-РАЗГРУЗОЧНЫХ РАБОТB^lBJU'^l.-' | 1973 |
|
SU377229A1 |
| МАНИПУЛЯТОРВСЕСОЮЗНАЯnATEb'TbO-TEXHiriЗНАЯ IHiri^:KAfffБНБЛ:^О>&:?ИА | 1971 |
|
SU318537A1 |
| Автоматический планировщик | 1980 |
|
SU1051170A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РАСПРЕДЕЛИТЕЛЕМ | 1968 |
|
SU212644A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРЕССОМ | 1972 |
|
SU330712A1 |
| Модульная силовая установка транспортного средства | 1990 |
|
SU1728505A1 |
| ПОДЪЕМНИК ДЛЯ ПОГРУЖЕНИЯ ИНВАЛИДА В БАССЕЙН | 1993 |
|
RU2063376C1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| ПЕДАЛЬНЫЙ ПРИВОД | 2003 |
|
RU2274576C2 |
| Манипулятор | 1982 |
|
SU1115899A1 |
