Изобретение относится к грузоподъемным устройствам.
Известны манипуляторы, содержаш,ие шарнирно сочлененную стрелу и геометрически подобную ей рукоятку управления, причем звенья стрелы снабжены следящим приводом с тросовым управлением от рукоятки.
Предлагаемый манипулятор отличается тем, что в нем, в целях повышения точности передачи управляющего сигнала, на осях подобных щарниров звеньев рукоятки и стрелы установлены блоки равного диаметра, огибаемые управляющим тросом в одном направлении.
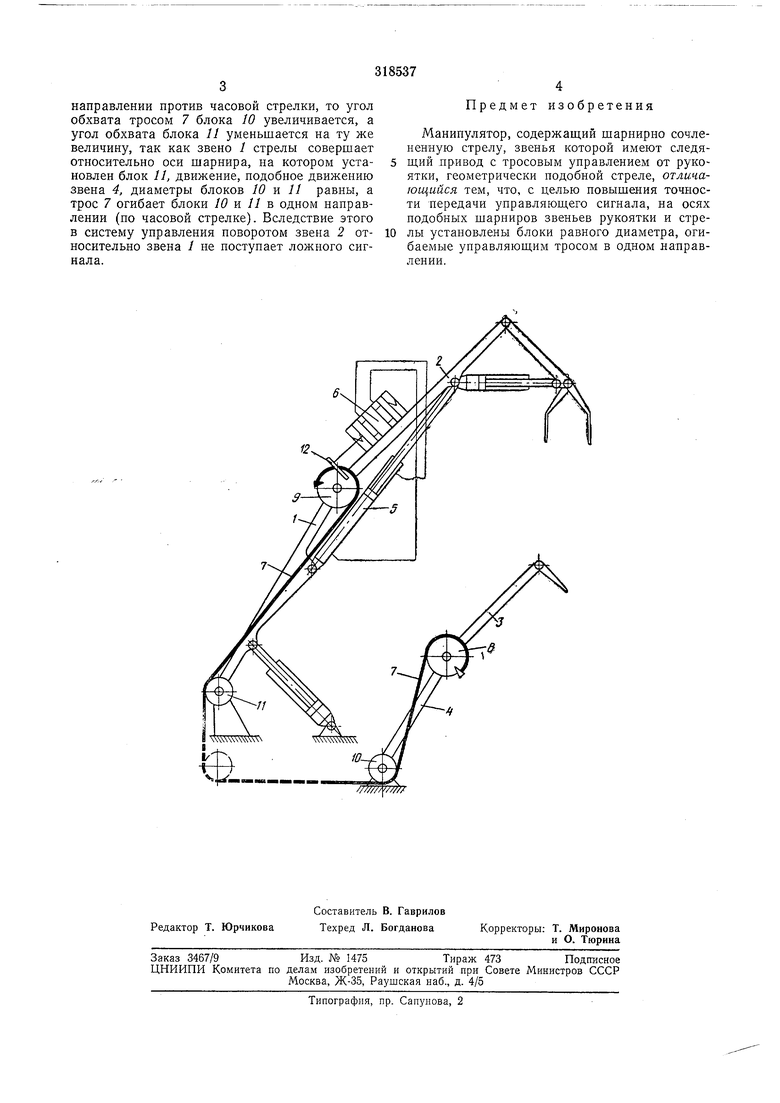
Манипулятор содержит стрелу из двух щарнирно соединенных звеньев У н 2 и геометрически подобную ей рукоятку управления из звеньев 5 и 4. Привод поворота звена 2 относительно звена 1 осуществляется гидроцилиндром 5, управляемым подпружиненным следящим золотником 6, закрепленным на звене 2. Подача управляющего сигнала осуществляется через трос 7 от рукоятки управления. На осях подобных щарниров рукоятки управления и щарнирно сочлененной срелы установлены блоки 8, 9 VI 10, 11 соответственно равного диаметра, причем блок 8 закреплен неподвижно относительно звена 3. Один конец троса закреплен на блоке 8, а другой - на блоке 9. Блоки 10 и //, установленные на
осях подобных щарниров, трос 7 огибает в одном направлении, например против часовой стрелки. Блок 9 щарнирно сочлененной стрелы снабжен толкателем 12, с которым находится в контакте подпружиненный следящий золотник 6.
Так как шарнирно сочлененная стрела геометрически подобна рукоятке управления,то угловые перемещения последней обрабатываются стрелой в масщтабе 1:1. При повороте, например, в направлении по часовой стрелке звена 3 относительно звена 4 трос 7 наматывается на блок 8 и, проходя через блоки 10 w. 11, поворачивает блок 9 относительно звена 2. При этом толкатель 12 смещает щток следящего золотника 6 из нейтрального положения. Золотник 6 соединяет одну из полостей гидроцилиндра 5 с нагнетательным трубопроводом, а другую со сливным. Это приводит к движению порщня гидроцилиндра, а следовательно, к повороту звена 2 в направлении по часовой стрелке относительно звена / до тех пор, пока щток золотника не займет нейтрального положения. Таким образом осуществляется жесткая обратная связь в следящем приводе.
направлении против часовой стрелки, то угол обхвата тросом 7 блока 10 увеличивается, а угол обхвата блока 11 уменьшается на ту же величину, так как звено / стрелы совершает относительно оси шарнира, на котором установлен блок //, движение, подобное движению звена 4, диаметры блоков 10 и 11 равны, а трос 7 огибает блоки 10 к 11 -в одном направлении (по часовой стрелке). Вследствие этого в систему управления поворотом звена 2 относительно звена / не поступает ложного сигнала.
Предмет изобретения
Манипулятор, содержаш,ий шарнирно сочлененную стрелу, звенья которой имеют следяш,ий .привод с тросовым управлением от рукоятки, геометрически подобной стреле, отличающийся тем, что, с целью повышения точности передачи управляюш,его сигнала, на осях подобных шарниров звеньев рукоятки и стрелы установлены блоки равного диаметра, огибаемые управляюшим тросом в одном направлении.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР ДЛЯ МОНТАЖНЫХ И ПОГРУЗОЧНО-РАЗГРУЗОЧНЫХ РАБОТB^lBJU'^l.-' | 1973 |
|
SU377229A1 |
| МЕХАНИЗМ ВЗАИМНОГО ПЕРЕЛ\Е1ЦЕНИЯ ЭЛЕМЕНТОВ | 1972 |
|
SU349632A1 |
| ВСЕСОЮЗНА!^ | 1973 |
|
SU385717A1 |
| Манипулятор | 1975 |
|
SU547195A1 |
| ТЕЛЕСКОПИЧЕСКАЯ СТРЕЛА ГРУЗОПОДЪЕМНОГО УСТРОЙСТВА | 1972 |
|
SU347292A1 |
| Телескопическая стрела манипулятора | 1976 |
|
SU555007A1 |
| Способ копания одноковшовым экскаватором и устройство для его осуществления | 1976 |
|
SU749988A1 |
| Гидропривод рабочего оборудования одноковшового экскаватора | 1982 |
|
SU1134679A1 |
| Система управления копирующего манипулятора | 1973 |
|
SU480538A1 |
| Манипулятор | 1975 |
|
SU529072A1 |
12
