I
Изобретение относится к области автоматического управления и может быть использовано в системах автоматического числового программного управления координатными перемещениями.
Известна двухкоординатная система программного управления, содержащая блок ввода программы, соединенный с арифметическим устройством, подключенным по каждой координате через последовательно соединенные регистр, первый преобразователь код - напряжение, координатный привод и датчик положения и общему преобразователю положение - код, выход которого подключен к другому входу арифметического устройства.
Однако известная двухкоординатная система имеет недостаточную точность работы.
Цель изобретения - повышение точности работы системы.
Цель достигается тем, что в предлагаемую двухкоординатную систему введены последовательно соединенные сумматор кодов коррекции, дополнительный преобразователь код - напряжение и сумматоры напряжений по каждой координате, подключенные к источнику опорного напряжения и первым преобразователям код - напряжение по каждой координате, а вход сумматора кодов коррекции соединен с одним из выходов арифметического устройства, что нозволяет повысить точность работы системы.
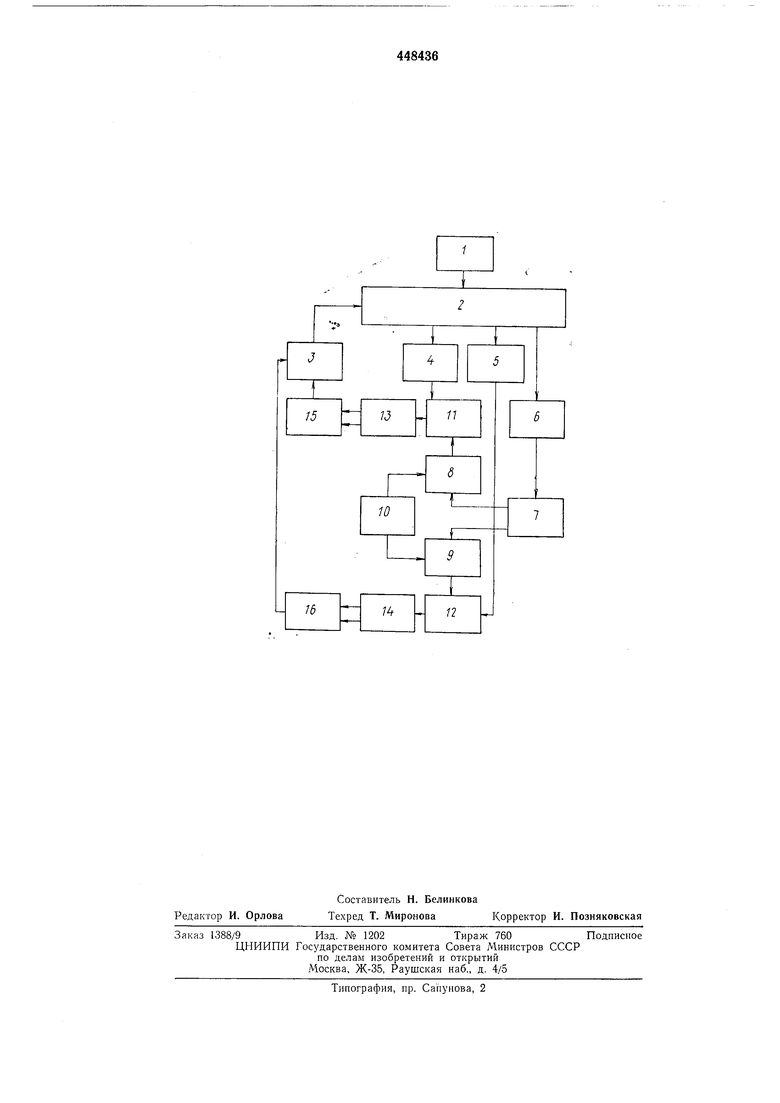
Блок-схема предлагаемой системы приведена на чертеже.
Система содержит блок 1 ввода программы, арифметическое устройство 2, общий преобразователь 3 положение - код, регистры 4 и 5, сумматор 6 кодов коррекции, дополнительный преобразователь 7 код - напряжение, сумматоры 8 и 9 напряжений, источник 10 опорного напряжения, первые преобразователи II и 12 код - напряжение, координатные приводы 13 и 14 и датчики 15 и 16 положения.
Система работает следующим образом.
Цифровые коды входной информации Хп, УИ, Хк, YK для воспроизведения линии с начальными координатами Хи, УН и конечными координатами Х, УК поступают в арифметическое устройство 2 из блока 1 ввода программы.
Все элементы системы работают циклически с постоянной частотой циклов.
В каждом текущем i-ы цикле арифметическое устройство 2, используя цифровые коды
исходной информации Х„, У„, Хк/ УК и цифровые коды действительного координатного положения Ад, Уд, которые вырабатывает преобразователь 3 положение - код в соответствии с электрическими сигналами, поступающими
от датчиков положения 15 и 16, вычисляет
цифровые коды координатных скоростей по формулам
Xi - Xffi -
i ni - ai
где Xui и Уп2 - цифровые коды координат программного положения на конец цикла, вычисляемые, например, для линейного закона по цифровым кодам исходной информации
Лц У-п, Л к, IKДалее арифметическое устройство 2 вычисляет цифровой код
Zi mXt - У„
где т - коэффициент наклона воспроизводимой наклонной линии, равный отношению.
к -
Знак и величина Zi определяются координатами действительного положения д,, Удг относительно программной линии с начальными «координатами Xty YH и конечными координатами к, YK.
Затем из арифметического устройства 2 в сеответствии со знаком Z, на вход сумматора 6 кодовкоррекции поступает импульсный код величины Zi, где осуществляется алгебраическое суммирование величины Z; с накоплен1-1ной алгебраической суммой
полученной в предыдущем (t-1)-м цикле.
В результате в текущем i-м цикле в сумматоре 6 кодов коррекции формируется цифровой код алгебраической суммы
.
Одновременно цифровые коды координатных скоростей текущего f-ro цикла передаются в регистры 4 и 5.
Двухполярный дополнительный преобразователь 7 код - напряжение в соответствии с цифровым кодом алгебраической суммы I 2 Z сумматора 6 кодов коррекции вырал 0
батывает два разнополярных напряжения, которые суглмируются на сумматорах 8 и 9 напряжения с опорным напряжением источника 10.
Выходные напряжения сумматоров 8 и 9 поступают на входы первых преобразователей
11и 12 код - напряжение. Преобразователи 11 и 12 код - напряжение
из выходных напряжений сумматоров 8 и 9 в соответствии с цифровыми кодами Xi и Fj регистров 4 и 5 вырабатывают управляющие напряжение для координатных приводов 13 и 14, которые осуществляют координатные перемещения с соответствующими скоростями в течение цикла.
Таким образом, с помощью сумматора 6 кодов коррекции, дополнительного преобразователя 7 код - напряжение и сумматоров напряжений 8 и 9 осуществляется дифференциальное воздействие на величины входных нитающих напряжений преобразователей 11 и
12код - напряжение в соответствии с величиной и знаком накопленной алгебраической
I
суммы 2 п полученной в текущем i-м
цикле.
Это суммарное воздействие в течение цикла приближает траекторию действительного движения к программной линии и компенсирует асимметрию координатных приводов 13 и 14.
В каждом последующем цикле система действует аналогичным образом.
Предмет нзобретения
Двухкоординатная система нрограммного
управления, содержащая блок ввода программы, соединенный с арифметическим устройством, подключенным по каждой координате через носледовательно соединенные регистр, первый преобразователь код - напряжение,
координатный привод и датчик положения к общему преобразователю положение - код, выход которого подключен к другому входу арифметического устройства, отличающаяся тем, что, с целью повышения точности работы системы, в нее введены последовательно соединенные сумматор кодов коррекции, второй преобразователь код-напряжение и сумматоры напряжений по каждой координате, подключенные к источнику опориого напряжения и первым преобразователям код - напряжение по каждой координате, а вход сумматора кодов коррекции соединен с одним из выходов арифметического устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для двухкоординатного позиционирования | 1982 |
|
SU1070512A1 |
| Двухкоординатная система программного управления | 1980 |
|
SU938264A1 |
| Устройство для двухкординатного программного управления | 1974 |
|
SU549788A1 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |
| Устройство для отображенияиНфОРМАции | 1976 |
|
SU798961A1 |
| Устройство двухкоординатного позиционирования | 1985 |
|
SU1288653A1 |
| Цифровой преобразователь координат | 1981 |
|
SU1076903A1 |
| Двухкоординатное устройство для программного управления | 1979 |
|
SU881673A2 |
| УСТРОЙСТВО для СЧИТЫВАНИЯ НЕПЕРЕСЕКАЮЩИХСЯГРАФИКОВ | 1971 |
|
SU321834A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |