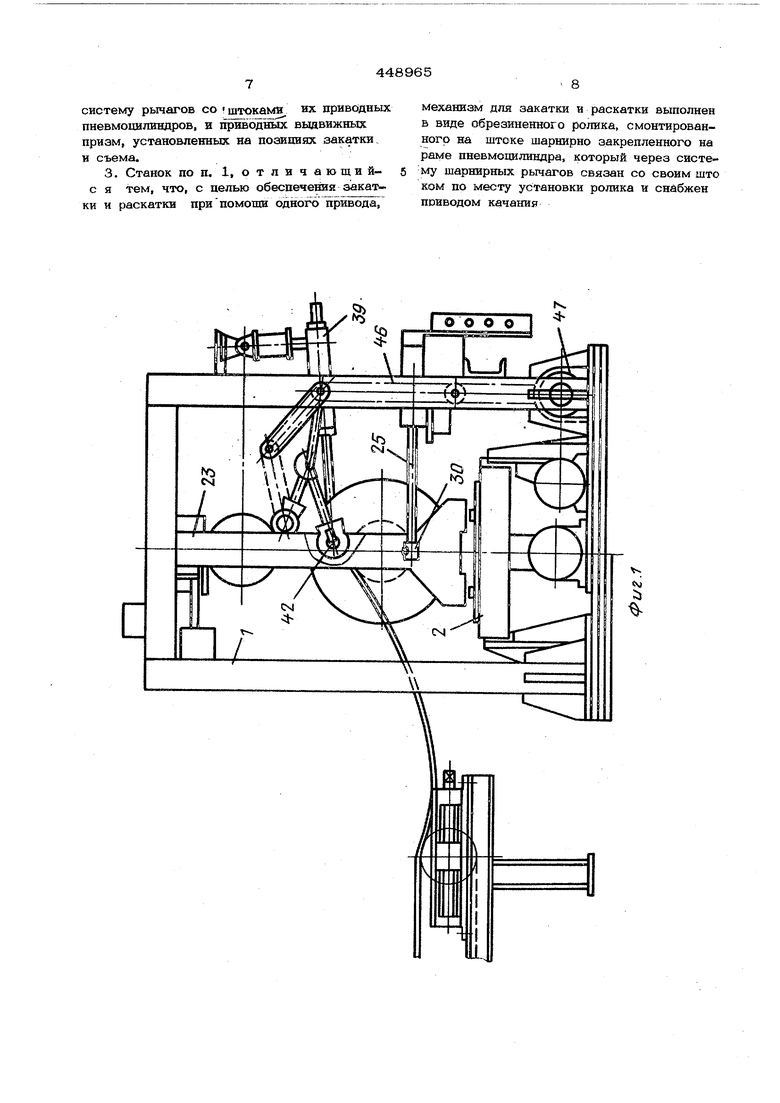
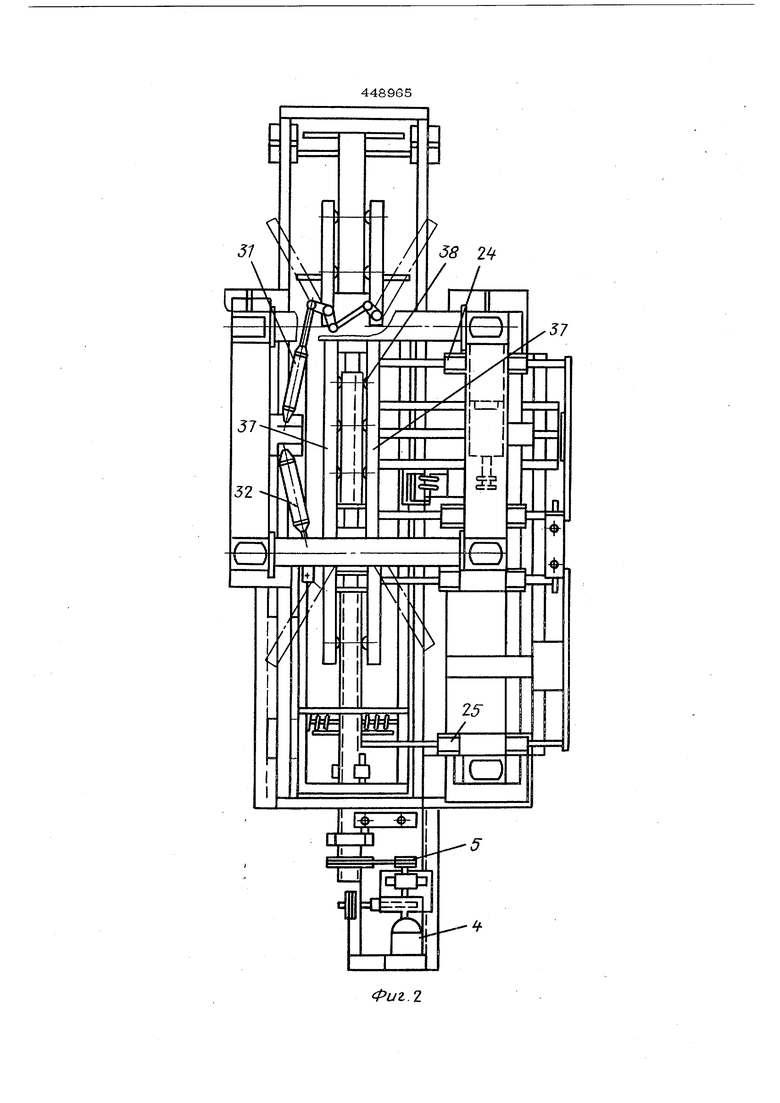
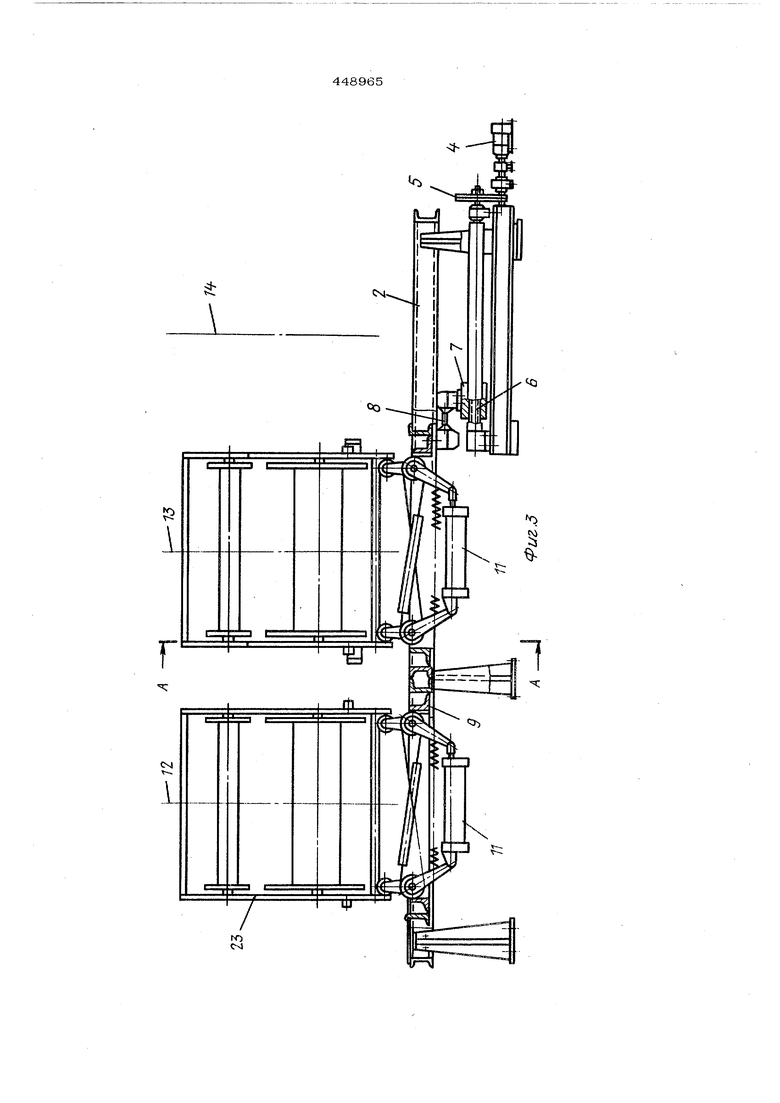
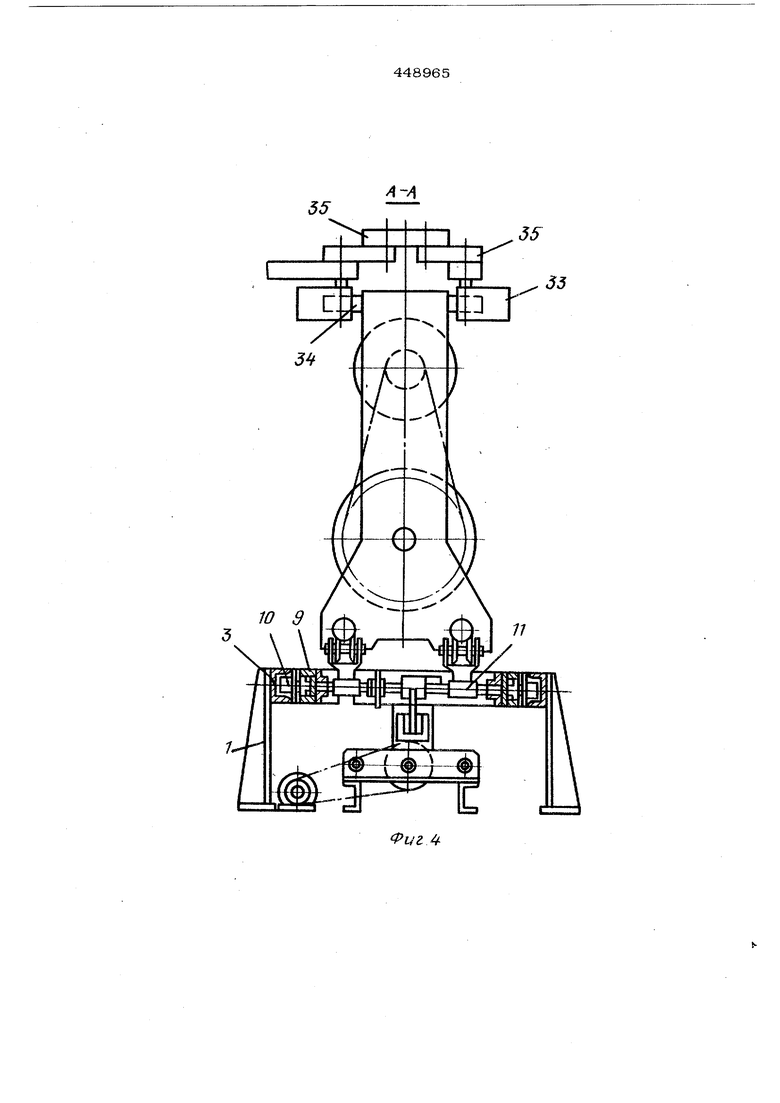
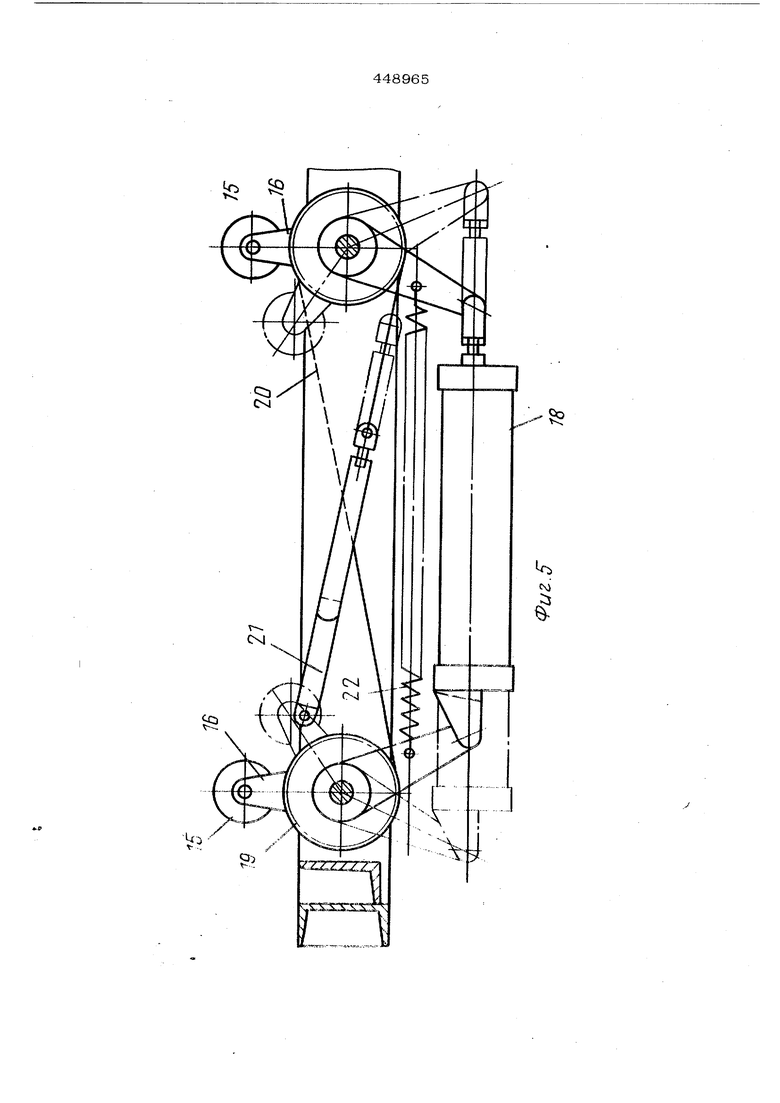
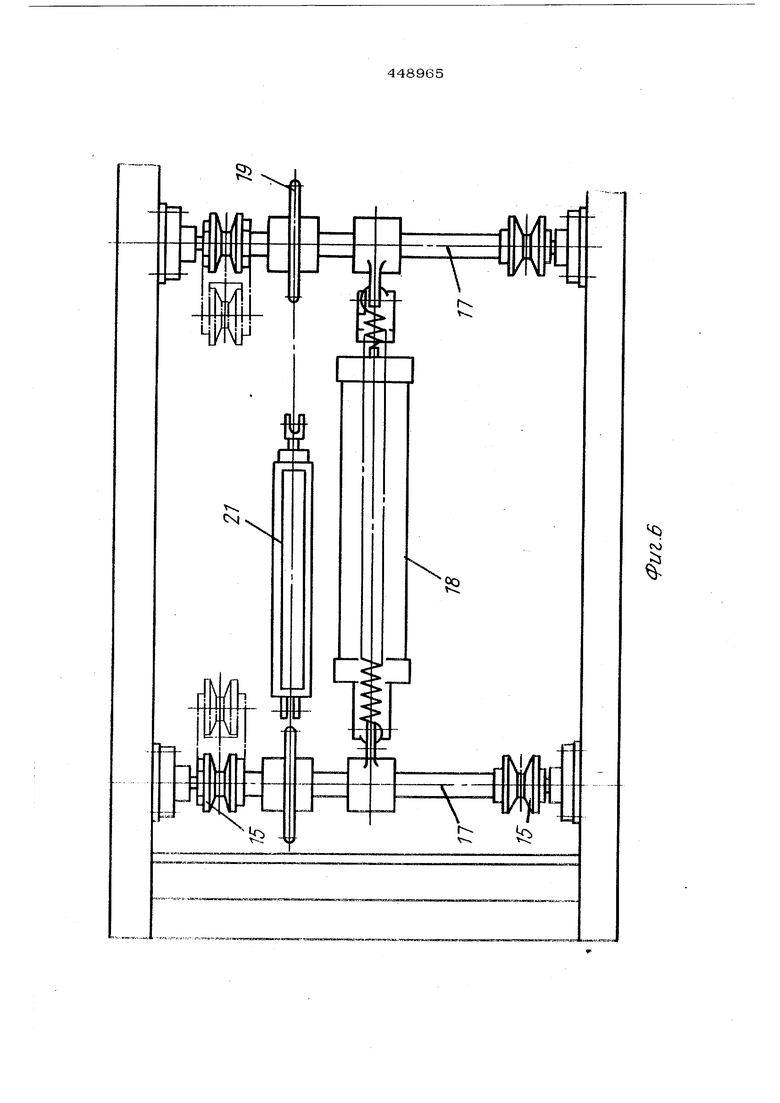
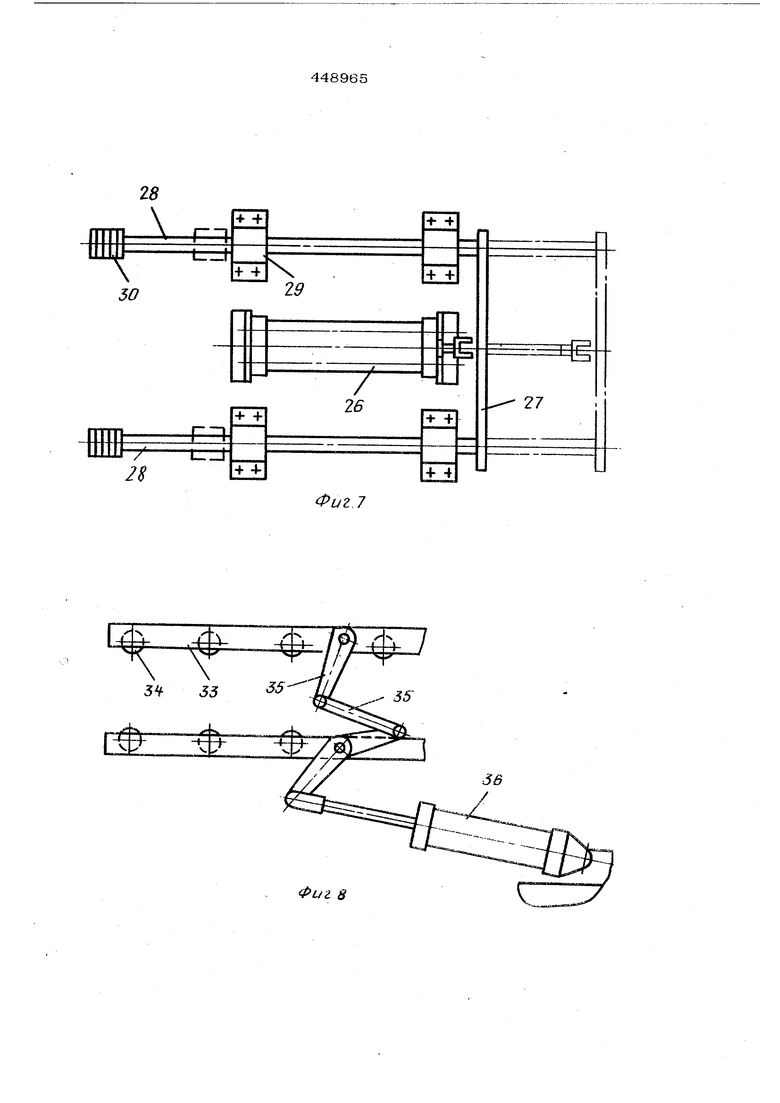
(54) СТАНОК ДЛЯ ЗАКАТКИ И РАСКАТКИ ПОЛОСОВЫХ МАТЕРИАЛОВ новленными кассетами; на фиг, 4 - разрез по А-А на фиг. 3; на фиг. 5 - устройство для подъема и опускаггая кассет; на фиг. 6 то же, вид в плане; на фиг. 7 - устройство для фиксации кассет; на фиг. 8 - устрю ство для центрирования кассет; на фиг. 9 механизм для закатки и раскатки материа лов. .. ,, Станок для раскатки и закатки полосовых материалов содержит раму 1 с подвижно смонтированным на нем механизмом 2 для перемещения кассет (см. фиг. З), кото рый перемещается по направляющим 3 от электродвигателя 4 посредством клиноременной передачи 5, винта 6, каретки 7 и тяги 8, соединенной с механизмом 2. Механизм 2 для перемещания кассет имеет двухпозишюнную подвижную платфор му 9 с катками 1О (см. фиг. 4), перемещаю иимися по направляющим 4, укрепленным на раме 1. Подвижная платформа 9 имеет два устройства 11 для подъема и опускания кассет, одно из которых принимает пустую кассету на позиции установки 12 и участвует в перемещении ее на позицию закатки 13, а второе принимает за- нолненную кассету на позиции закатки 13 и перемещает на позицию съема 14, Каждое устройство 11 (см. фиг, 5 и 6) для подъема и опускания кассет имеет две пары призматических роликов 15, установленных подвижно на шарнирных рычагах 16 жестко закрепленных на валах 17. На других концах рычагов 16 щарнирно прикреплены шток и проушина пневмоцилиндра 18, На валах 17 жестко смонтированы звездочки 19, соединенные перекрещивающейся цепью 2 О. В месте перекрещивания цепи 2 О имеется рамка 21, пропускающая в своем пазу цепь 2О, концы которой закреплены с обеих сторон рамки 21, Для удержания призматических роликов 15 в верхнем положении рычаги 16 со стороны креп ления пневмоцилиндра 18 соединены пружиной 22. Для опускания призматических роликов 15 служит пневмоцилиндр 18, воздействующий на одни концы шарнирных рычагов 16, жестко связанных с валаNffl 17, Цепь 2О и звездочки 19 предназначены для синхронизации поворота каждой пары рычагов 16. Кассета 23 имеет две щеки, соединен : вые цилиндрическими стяжками, которыми она монтируется на призматические роли, ки 15. Между щеками кассеты 23 устанавливаются подвижно вверху бобина для прокладки и внизу бобина для закатки состыкованной полосы или ткани. С наружных сторон щек кассета 23 имеет две цилиндрические цапфы, с помощью которых : она размещается на призмах устройств для фиксации 24 и 25 кассет, расположенных на раме соответственно на позициях закатки 13 и съема 14, Устройства для фиксации 24 и 25 (см, фиг, 7) кассет имеют пневмоцилиндр 26, шток которого шарнирно соединен с планкой 27, жестко скрепленной со щтангами 28, перемешающимися в направляющих 29, На концы щтанг 28 жестко насажены призмы ЗО, вьщвнгаемые вперед на позиции установки на них кассет 23 или убираемые в исходное положение пневмоцилиндрами 26, Для центрирования кассет 23 на позициях установки 12 и съема 14 смонтированы два одинаковых устройства для центрирования 31 и 32 (см. фиг. 2) кассет. Они содержат подвижные планки 33 (см. фиг. 8), на которых смонтированы свободно вращающиеся ролики 34. Подвижные планки 33 приводятся в действие рычажной системой 35 от пневмоцилиндра 36, расположенного в верхней части рамы 1. Центрирование кассет 23 на позиции закатки 13 осуществляется жестко укрепленными на раме 1 планками 37, имеющими свободно вращающиеся ролики 38. Механизм для раскатки и закатки 39 (см. фиг, 1) закреплен с помощью кронштейнов 4О и 41 (см. фиг. 9) на раме 1, Обрезиненный ролик 42 выдвигается вперед пневмо1шлиндром 43 и прижимается при закатке к нижней, а при раскатгсе к верхней бобине кассеты 23 пневмоцилинд-. ром 44, Ролик 42 приводится в движение с помощью цепной передачи 45 и 46 от электродвигателя с редуктором 47, Станок работает следующим образом, В исходном положении подвижная платформа 9 находится в крайнем левом положении (см. фиг, 3), т. е. на позиции установки 12 кассет. Призматические ролики 15 подвижной платформы 9 (см, фиг, 5) опущены как на позиции установки 12, так и на позиции закатки 13, Подвижные планки 33 ( см. фиг, 8) на позициях установки 12 и съема 14 разведены в крайние по/ оження. Призмы ЗО (см. фиг, 7.) отведены в крайнее правое положение (показано пунктиром). Ролик 42 (см, фиг, 9) отведен в крайнее правое положение.
Кассета 23 с помощью тельфера или другого грузоподъемного механизма устанавливается на позиции установки 12 своими цилиндрическими стяжками на призматические ролики 15 подвижной платформы 9 Устройство для подъема и опускания 11 кассет перемещает кассету в верхнее положение, а устройства для центрирования 31 и 32 кассет, сводит подвижные планки 33 и своими роликйми 34 центрируют кассету 23 относительно осевой линии станка. Затем подвижная платформа 9 с установленной кассетой 23 перемещается на позицию съема 14, вследствие чего установленная кассета 23 оказьтается на позиции закатки 13.
Пневмодиливдры 26 выдвигают призмы 30 вперед одновременно на позицияхзакатки 13 и съема 14. Призматические ролики 15 пневмоцилиндрами 18 опускаются и кассета 23 своими цилиндрическими цапфами, расположенными с обеих сторон щек, фиксируется на призмах ЗО и удерживается ими. Далее подвижная платформа 9 электродвигателем 4 перемещается в исходное положение - на позицию установки 12, где производится установка пустой кассеты 23 на призматические ролики 15,
В это же время производится заправка конца закатываемой ткани на нижнюю бобину кассеты 23, пневмоцилиндром 43 выдви1ается вперед ролик 42, а пневмоцилиндром 44 этот ролик прижимается к нижней бобине кассеты 23. Включается электродвигатель с редуктором 47 и через цепные передачи 45 и 46 передается вращение ролику 42, закатывающему материал в прокладку. Закатываемый материал поступает либо с транспортера, либо с компенсатора, устанавливаемых перед станком для закатки.
По окончании закатки обрез 1ненный ролик 42 отводится в исходное положение пневмоцилиндрами 43 и 44, останавливается электродвигатель с редуктором 47, призматические ролики 15 подвижной платформы 9 перек1е1паются в верхнее положение на ПОЗИ1ШЯХ закатки и установки, кассета 23, находящаяся на позиции закатки, призматическими роликами 15 снимается с призм 30 и поднимается, находящаяся на позиции установки кассета также перемещается в верхнее цоложе1ше призматическими роликами 15. Закатываемый материал обрезается,
Приамы 30 на позициях закатки 13 и съема 14 одновременно убираются в исходное положение пневмохшлиндрами 26, подвижная платформа 9 перемещает кас6
сеты с позиций установки 12 и закатки J 8 соответственно на позиции закатки 13 и съема 14. По окончании перемещении платформы 9 призмы ЗО выдвигаются вперед, iпризматичесие ролики 15 опускаются и Kai сеты 23 своими цилиндрическими цапфами фиксируются на призмах ЗО и удержггвак:1Ч-. ся ими.
Подвижная платформа 9 перемещается в исходное положение. .Запо/шенная кассета 23, находящаяся на позиции съема 14 тельфером или другим грузоподъемным механизмом снимается с призм 30 и передается в транспортную систему, причем подвижные планки 83 центрирующих устройств при съеме кассеты с призм ЗО одновременно расходятся. Затем на позиции установки 12 пустая кассета 23 устанавливается на призматические ролики 15 подвижной плат1}юрмы 9, при этом подвижные планки 33 центрирующих устройств 31 и 32 сходятся и центрируют установленную кассету относительно осевой линии станка. Далее цикл повторяется.
Станок может работать как в автомат 1 ческом цикле выполнения операций, так и с ручным управлением,
Предмет изобретения
1.Станок для закатки и раскатки полосовых материалов, например раскроенных и состыкованных в непрерывную ленту металлокордных заготовок, содержащий CMOHTHJрованные на раме устройства для центрирования и фиксации, кассет с бобинами и механизм для закатки и раскатки с фрикционным приводом, отличающийся тем, что, с целью сокращения занимаемой производственной площади, он снабжен механизмом для установки и перемещения кассет с позиции установки на позиции закатки и съема, выпо;шенным в виде подвижной но размещенным на раме рельсам приводной двухпозИ1Шонной платформы с установленные ми на каждой ее позиции устройствами для подъема и опускания кассет, выполненными
в виде пар призматических роттов, смонтированных на рычагах, закрепленных на платформе с возможностью поворота и снабженных приводом их качания.
2.Станок по п. 1, о т л и ч а ю щ и йс я тем, что устройства для центрирования и 481ксации кассет выполнены в виде подвижных планок, расположенных на позициях установки и съема н связанных через
систему рычагов со штоками их приводных пневмоиилиндров, и приводных выдвижных призм, установленных на поаипиях закатки н съема.
3. Станок по п. 1, о т л и ч а ю щ и йс я тем, что, с целью обеспечения закатки и раскатки при помощи одного привода.
механизм для закатки и раскатки выполнен в виде обрезиненного ролика, смонтированного на штске шарнирно закрепленного на раме пневмоиилиндра, который через систему шарнирных рычагов связан со своим што ком по месту установки ролика и снабжен псиводом качания
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНОК ДЛЯ РАСКАТКИ ПОЛОСОВОГО МАТЕРИАЛА | 1982 |
|
SU1075556A1 |
| УСТРОЙСТВО ДЛЯ ЗАКАТКИ И РАСКАТКИ ЛЕНТОЧНОГО МАТЕРИАЛА | 1973 |
|
SU405740A1 |
| УСТРОЙСТВО ДЛЯ ЗАКАТКИ В КАССЕТЫ ЭЛАСТИЧНОГО ЛЕНТОЧНОГО МАТЕРИАЛА | 1971 |
|
SU422631A1 |
| Устройство для закатки обрезиненного корда | 1983 |
|
SU1100126A1 |
| Автомат для сборки пластинчатых магнитопроводов электрических машин | 1981 |
|
SU991553A1 |
| УСТРОЙСТВО ЦЕНТРИРОВАНИЯ И ЗАГРУЗКИ С УЗЛОМ ПРИЕМА И ПОДАЧИ ЧУРАКА В ЗОНУ ЦЕНТРОВКИ И МЕХАНИЗМОМ СИНХРОНИЗАЦИИ | 2008 |
|
RU2378107C1 |
| Устройство для раскатки ленточного материала | 1980 |
|
SU903195A1 |
| Устройство для закатки, хранения и раскатки полосовых материалов | 1974 |
|
SU572380A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ РУЛОННОГО МАТЕРИАЛА | 1981 |
|
SU1139688A1 |
| Устройство для закатки обрезиненного корда в прокладку | 1980 |
|
SU903194A1 |

csi
S Г-. iE ( -
Фиг 7 Ж -3 55 т Фиг 8
.9
