1
1-1зобретение относится к области .механизации погрузочио-разгрузочных работ.
Основные авт. свид Ли 2S/4ob и Ле ЗаоОУ4 выданы на устройсиво для погрузки звеньев оросительного разборного труОопровода.
Дель изоОретения - обеспечить воз.можность захвата трубы с любого уровня и фиксации устройства в транспортном положении. Достигается это тем, что опорная рама выполнена с направляющим : пазом, а между стрелой и силовым цилиндром ее поворота установлено посредством пальцев звено с продольным, пазом, причем один из пальцев размещен в продольном пазу звена, а дру-. гой - Б направляющем пазу опорной рамы.
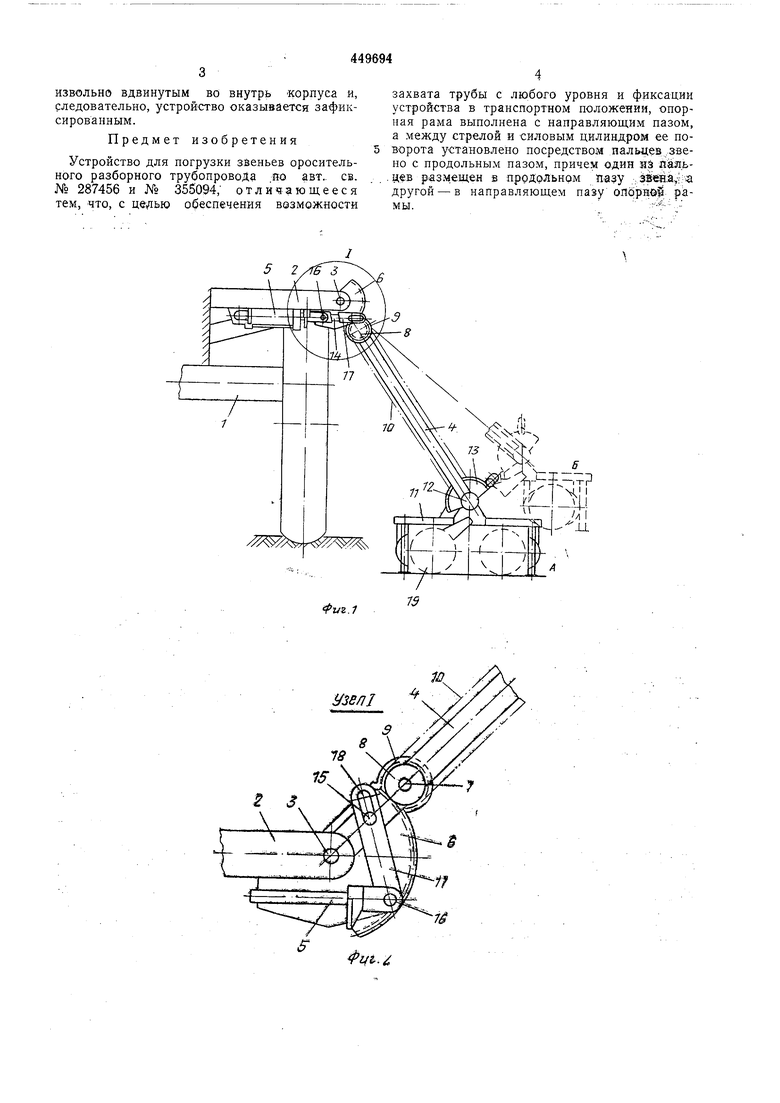
На фиг. 1 изображено предлагаемое .устройство, вид спереди; на фиг. 2 - узел 1, в положении фиксации устройства.
Устройство включает базовое шасси 1 с опорной рамой 2, поворотную на шарнирном пальце 3 стрелу 4, силовой цилиндр 5 поворота стрелы, зубчатый сектор 6, закрепленный на раме 2, вал 7 с закрепленными на его концах зубчатой шестерней 8 и звездочкой 9, цепную передачу 10, поворотный захват 11 на конце стрелы с приводом от звездочки 12 и механизм 13 отключения привода.
Опорная рама выполнена с направляющим пазом 14, а между стрелой и силовым -цилиндром 5 установлено посредством пальцев 15 и
16 звено кривошипа 17 с продольным пазом 1. Палец 10 размещен в продольном пазу Itt, а палец 1U - в направляющем пазу 14. Работает устройство следующим образом.
При погрузке звена 19 трубопровода в контейнер стрела с захватом опускается над звеном.
При размещении звена в положении Б остаток хода штока силового цилиндра расходуется на выборку величины пазы 1Ь в звене кривощипа 17.
При прекращении хода штока (положение А) происходит дальнейшее опускание стрелы под действием собственного веса «а величину того же паза 18. При подъеме трубы из положения А цилиндр 5 включается в работу немедленно, а из положения Б - только после выбора холостого хода, равного величине все того же паза.
В процессе, подъема устройства продольная ось звена кривошипа 17 приближается к «мертвому - положению, которому соответствует перпендикуляр к оси силового цилиндра; в крайнем верхнем положении ось звена
кривошипа 17 располагается за «мертвым положением, что обеспечивает преобразование веса устройства в силу, направленную на извлечение штока из корпуса силового цилиндра. В результате этого шток под действием веса устройства не может оказаться про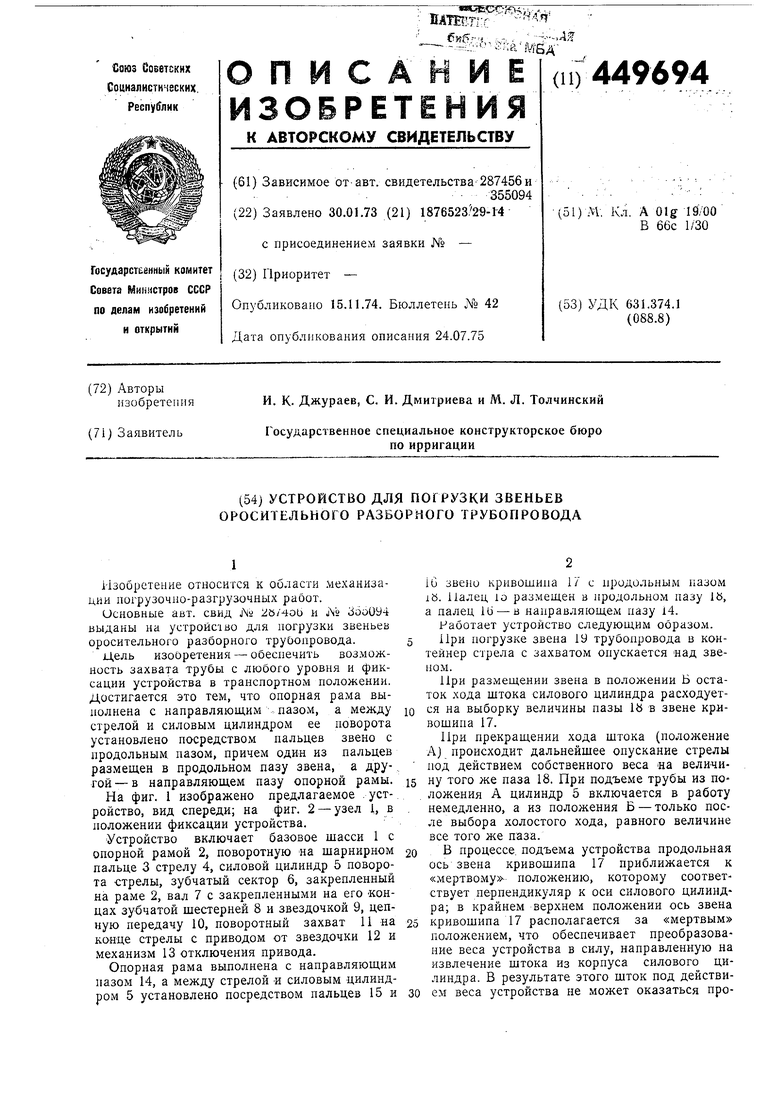
| название | год | авторы | номер документа |
|---|---|---|---|
| Эвакуационный тягач | 1990 |
|
SU1791192A1 |
| ПЕРЕДВИЖНОЕ ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 1997 |
|
RU2137700C1 |
| Транспортное средство для погрузки и буксировки неисправных автомобилей | 1990 |
|
SU1780524A3 |
| САМОСВАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2652759C2 |
| КУЛЬТИВАТОР | 1995 |
|
RU2090025C1 |
| Ходовая тележка горной машины | 1978 |
|
SU877072A1 |
| УСТРОЙСТВО ДЛЯ ОСТАНОВКИ КАРЕТКИ, ВЗАИМОДЕЙСТВУЮЩЕЙ С ТЯГОВОЙ ЦЕПЬЮ | 1998 |
|
RU2137691C1 |
| МНОГОЦЕЛЕВОЙ МАНИПУЛЯТОРНЫЙ АГРЕГАТ | 1992 |
|
RU2016756C1 |
| Погрузчик | 1985 |
|
SU1260319A1 |
| Транспортное средство со съемным контейнером | 1986 |
|
SU1393684A1 |
