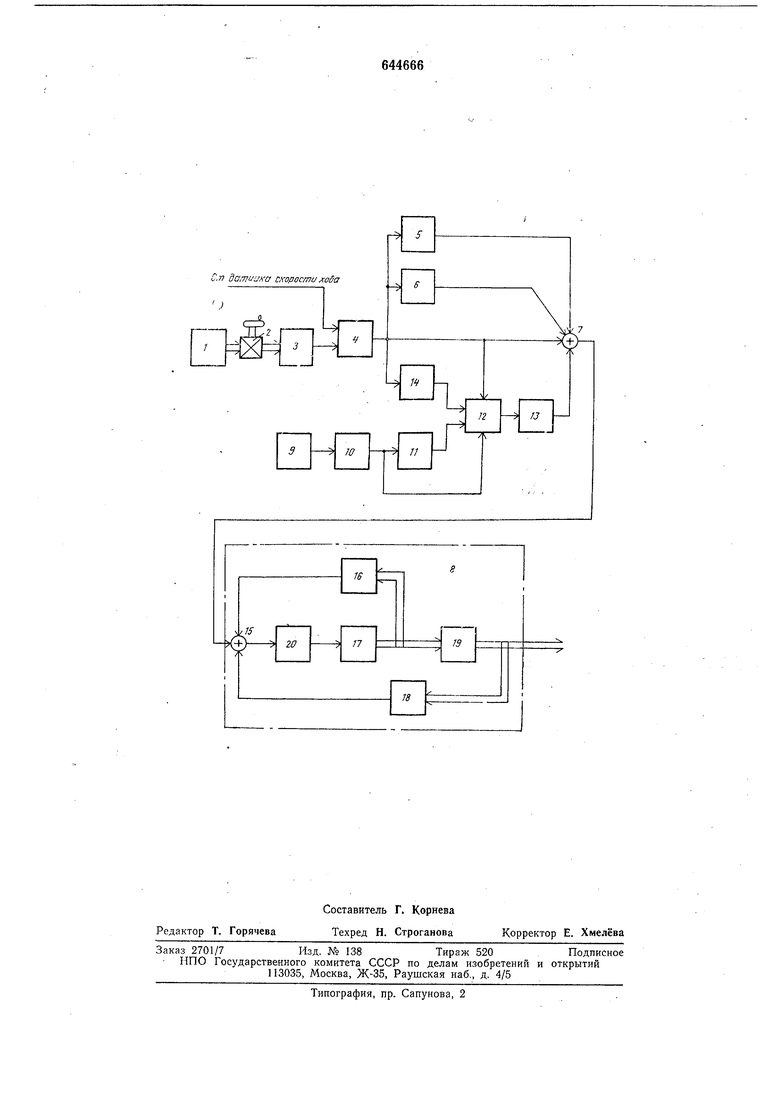
но, а к третьему входу дополнительного сумматорс 12 подключено устройство 14 выработки и сравнения первой н второй производных курса, подключенное СВОим входом к выходу фильтра 4, управляющий в.ход которого нредназначен для подключения к датчику скорости хода (на чертеже не показан).
Следящий привод 8 рулевой машины включает в себя суммирующий блок 15, включенный на его входе н соединенный своими входами с сумматором 7, датчиком 16 насоса, которым снабжен исполнительный механизм 17, и датчиком 18 обратной связи, которым снабжена рулевая машина 19. Выход суммирующего блока 15 нодключен к иснолннтельному механизму 17 через усилитель 20.
Система работает следующим образом. Сельсин-приемник в гирокомпасе при отклонении судна от курса через механическую передачу 2 разворачивает датчик 3 курса. Сигналы датчика 3 н датчика скорости хода поступают на первый и второй входы фильтра 4 соответственно, в котором происходит выделение частоты собственных колебаний судна, зависящей от скорости хода. Выход фильтра 4 электрически связан с блоками 5 н G устройством 14 н первым входом дополнительного сумматора 12. При крене судна датчик 9 крена вырабатывает сигнал, который, поступает на вход преобразователя 10, выход которого соединен с входом устройства 11 и вторым входом дополнительного сумматора 12.
В устройствах 11 и 14 происходит выработка первой и второй производных по крену н курсу соответственно, а также сравнение знаков нервой и второй нроизводных. В дополнительном сумматоре 12 в зависимости от сигналов, постунающих из устройств 11 и 14, происходит сравнение сигналов, постунающнх через фильтр 4 от датчика 3 курса и от преобразователя 10 угла и крепа, и выбор результирующего сигнала. Результирующий сигнал с дополнительного сумматора 12 ностунает на вход блока 13 выработки управляющего сигнала н с его выхода на сумматор 7, куда также поступают сигналы с выхода днфференцируюп1,его 5 к интегрирующего 6 блоков. Суммарный сигнал с датчика 3 курса дифференцнрующего 5 и интегрирующего 6 блоков н 5 блока 13 поступает на вход усилителя 20 через суммирующий блок 15, а с его выхода- па исполнительный механизм 17, который воздействует па управляющий орган рулевой машины 19. Рулевая машина 19
10 разворачивает руль в нужном направлении до тех пор, пока напряжение датчика 16 насоса и датчика 18 обратной связи не будет равно входному напряжению усилителя 20.
Формула изобретения
Система управлеиия судном, содержащая
0 сельсин-прнемннк гнрокомпаса, связанный через механическзпо передачу с датчиком курса, интегрирующий и дифференцирующий блоки, выходы которых соединены соответственно с одним и другим входами
5 сумматора, подключенного своим выходом к следящему приводу рулевой мащины, отл н ч а ю ш а я с я тем, что, с целью уменьшения раскачки судна при больших скоростях, она снабжена датчиком крена с преобразователем, устройствами выработки и сравнения первой и второй нроизводных курса и крена соответственно, подключенным к их выходам дополнительпым сумматором с последовательно включенным с ним блоком
5 выработки управляющего сигнала, подключенного своим выходом к одному из входов сумматора, и фильтром, соединенным своим входом с датчиком курса, а выходом - С входами интегрирующего и дифференцирующего блоков и с третьими входами сумматоров, а входом устройства выработки и сравиенпя первой и второй производпых крепа, подключен к выходу преобразователя датчика крена, подключенному к четвертому входу дополнительного сумматора.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 984356, кл. В 63Н 25/04, 1967.
С.п dOiTji/Ma скорости хода )
Ш
| название | год | авторы | номер документа |
|---|---|---|---|
| Система стабилизации судна по курсу и бортовой качке | 1982 |
|
SU1030260A1 |
| Авторулевой | 1988 |
|
SU1579851A1 |
| Устройство автоматического управления курсом судна | 1984 |
|
SU1237555A1 |
| СУДОВОЙ АВТОРУЛЕВОЙ | 1972 |
|
SU337300A1 |
| Система управления рулевой машиной | 1979 |
|
SU818961A1 |
| Тренажер для обучения управлению курсом судна | 1985 |
|
SU1355993A1 |
| Система уменьшения бортовой качки и рыскания по курсу судна | 1979 |
|
SU903813A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| Система управления курсом судна | 1983 |
|
SU1131772A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |