ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА МАЯТНИКОВОГО ТИПА
1
Изобретение относится к подъемно-транспортной технике, а имешш к подвесным канатным дорогам маятникового типа.
Известны подвесные канатные дороги маятникового типа преимупдественио для .трелевки леса, содержащие каретку, которая снабжена тормозом, зандемляющим ее -на несущем канате, приводным командным и грузозахватным механизмами, а также подъемным канатом с грузовым крюком.
Однако в известных канатных дорогах при стопорении каретки на несущем канате в любом месте трассы происходит одновременное освобождение головки грузового крюка в механизме захвата каретки, что приводит к резкому сбрасыванию груза с каретки, в результате чего портится сам груз или обрывается подъемный канат.
Цель изобретения - обеспечение автоматической расфиксации грузового крюка и управляемого спуска груза после стопорения каретки на несущем калате.
Для этого грузозахватный механизм вьиполнен с подпружиненными командными и грузовыми кулачками, защемляющими головку грузового крюка, управляемыми посредством щтока с конусом и вилки тяги, соединенной через рычаг с клином тормоза.
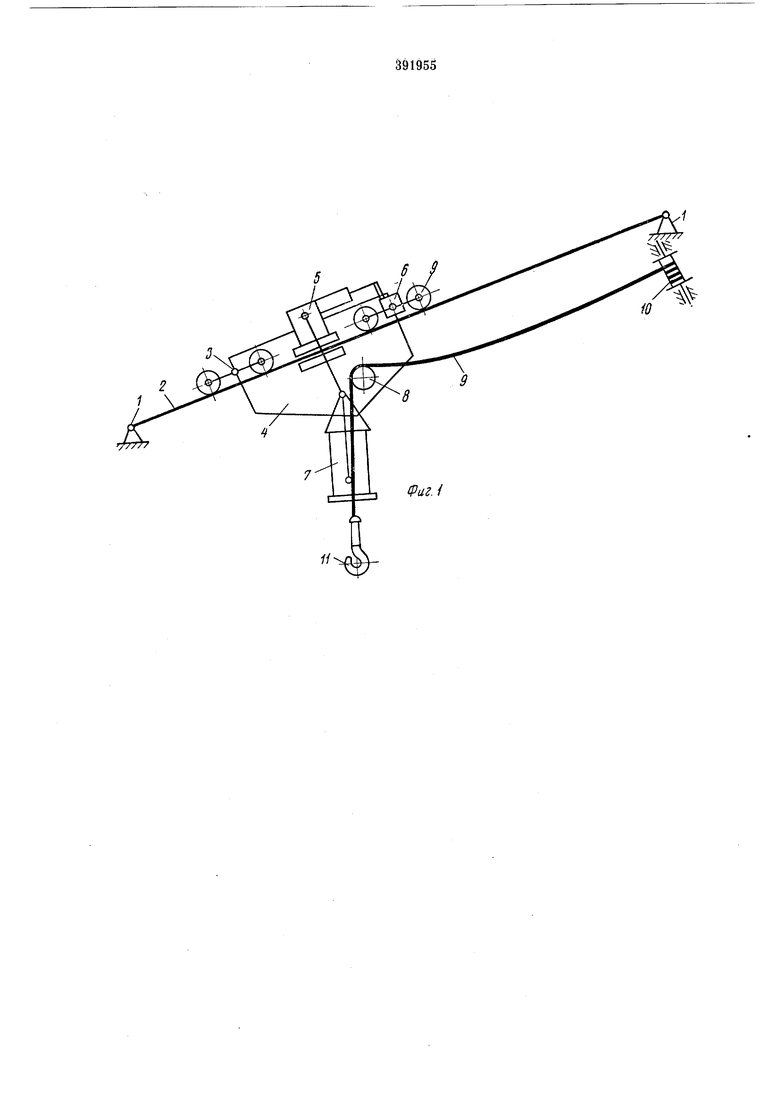
Для обеспечения надежной работы узлоз каретки при расфиксации ее на несущем канате приводной командный механизм может быть снабжен фиксатором с буртиком, связанным с тягой через качающийся рычаг. На фиг. 1 изображена схема предлагаемой
подвесной канатной дороги; на фиг. 2 - кинематическая схема автоматических узлов каретки (пунктиром показано рабочее положение узлов).
Подвеспая канатная дорога содержит опоры
которых закреплен несущий канат 5, взаимодействующий с ходовыми тележками 3 каретки 4, па которой смонтированы тормоз 5, командный механизм 6, грузозахватный механизм 7 и направляющий блок 8 под подъемный канат Я проходящий через грузозахватный механизм н соединенный одним концом с ириводом 10, а другим с грузовым крюком 11. Тормоз 5 содержит клиновые колодки 12, прижимные ролики 13, ползуны 14, пружины
15, клин 16 и рычаг 17.
Грузозахватный механизм выполнен с подпружинеппыми комапдпыми 18 и грузовыми 19 кулачками, защемляющими головку грузового крюка /) и управляемыми посредством
щтока 20 с конусом 21, пружины 22, щарнирной тяги 23 с вилкой 24, соединенной через рычаг 25 с клином 16 тормоза 5.
Приводной командный механизм снабжен фиксатором 26 с буртиком, связанным с тягой
27 через качающийся рычаг 28.
Для стопореиия каретки 4 на несущем ка1-гатев2 и выпуска грузового крюка / каретку останавливают, а затем перемещают в обратном направлении до стопорения. При движении каретки назад вращательное движение приводного колеса 29 ходовой тележки 3 через зубчатую передачу 30 передается на винтовую пару 31 (винт-гайка). Гайка, перемещаясь по винту, тянет за собой тягу 27, которая качающимся рычагом 28 перемещает фиксатор 26, пружина 32 сжимается, в результате этого фиксатор 26 выходит из зацепления с рычагом 17, и клин 16 опускается. При этом ползуны 14 смыкаются пружинами 15 н зажимают клиновые колодкн 12 на несущем канате, в результате чего каретка будет застопорена на несущем .канате и при смещении ее после этого в ту или другую сторону клиновые колодки еще больше сомкнутся прижимными роликами 13.
При стопорении каретки на несущем канате
рычаг /7 опускается и поднимает рычагом 25
шарнирйую тягу 23 с вилкой 24, в результате
.,. .ШЮк 20 от действия предварительно сжатой
,, 22 поднимается и конусом 21 раздви;.гает командные кулачки 18. При этом для ито- ворота грузовых кулачков 19, расноложевных
на одних осях 33 с командными кулачками 18
и прижатых головкой 34 грузового крюка 11,
необходимо натянуть грузоподъемный канат Я
который поднимет головку грузового крюка и
освободит кулачки J9.
После ослабления грузоподъемного каната головка крюка беспрепятственно освободится из грузозахватного механизма каретки, и грузовой крюк опустится. При этом подпружиненный ломающийся рычаг 35 отклоняется проходящей головкой грузового крюка.
Таким образом, произойдет расфиксация грузового крюка в грузозахватном механизме.
Фиксация грузового крюка и расстопорение каретки ва несущем канате производятся при подъеме крюка // и заходе его в грузозахватный механизм 7 каретки. Головка крюка при
этом воздействует на ломающийся рычаг 35, отклоняет его и через тягу 23 посредством рычагов 25 и 17 поднимает клип 16 до его фиксации фиксатором 26, который перемещается сжатой пружиной 32.
При опускании тяги 23 вилка 24 нажимает на щток 20, опускает его и сжимает пружину 22. При этом командные и грузовые кулачки занимают рабочее положение при помощи
пружины 36. При движении головка 34 грузового крюка проходит грузовые кулачки 19 и запирается ими в грузозахватном механизме 7. После подъема клина 16 и его фиксации
клиновые колодки 12 расходятся, а каретка расстопоривается на несущем канате и может траиспортироваться в любом направлении по несущему канату с зафиксированным в ней грузом.
Предмет изобретения
1. Подвесная канатная дорога маятникового типа преимущественно для трелевки леса, содержащая каретку, которая снабжена тормозом, защемляющим ее на несущем канате, лриводиым командным и грузозахватным механизмами, а также подъемным канатом с
грузовым крюком, отличающаяся тем, что, с целью обеспечения автоматической расфиксации грузового крюка и управляемого спуска груза после стопорения каретки Hia несущем канате, грузозахватный механизм выполнен с
нодпружиненными командными и грузовыми кулачками, защемляющими головку грузового крюка, управляемыми посредством щтока с конусом и вилки тяги, соединенной через рычаг с клином тормоза.
2. Канатная дорога по п. 1, отличающаяся Т6М, что, с целью обванечения надежной работы узлов каретки при расфиисаадии ее «а несущем канате, приводной командный механизм снабжен фи1К Сатором с буртико1М, связанным с ТЯ1ГОЙ через 1качаю|щий1ся рычаг.
0
Фиг 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесная канатная дорога маятникового типа | 1977 |
|
SU737275A1 |
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА МАЯТНИКОВОГО ТИПА | 1966 |
|
SU184285A1 |
| Подвесная канатная дорога | 1960 |
|
SU137534A1 |
| Трелевочная каретка | 1978 |
|
SU742208A1 |
| Наклонная подвесная канатная дорога | 1959 |
|
SU132558A1 |
| Стопорное устройство для подвесной канатной дороги | 1980 |
|
SU893644A1 |
| МАЯТНИКОВАЯ ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 1967 |
|
SU202986A1 |
| АВТОМАТИЧЕСКАЯ ТРЕЛЕВОЧНАЯ КАРЕТКА | 1967 |
|
SU198379A1 |
| Трелевочная каретка подвесной канатной дороги | 1984 |
|
SU1296459A1 |
| Подвесная канатная дорога маятникового типа | 1977 |
|
SU643383A2 |