(54) СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРЕССОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления гидравлическим прессом | 1977 |
|
SU660853A1 |
| Система управления гидравлическим прессом | 1989 |
|
SU1636252A1 |
| Система управления гидравлическим прессом | 1979 |
|
SU872310A1 |
| Система управления гидравлическим прессом | 1982 |
|
SU1057300A1 |
| Система автоматического управления ковочным прессом | 1975 |
|
SU610678A1 |
| А УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМПРЕССОМ | 1967 |
|
SU201036A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРЕССОМ | 1973 |
|
SU380478A1 |
| Система управления гидравлическим прессом | 1987 |
|
SU1454730A1 |
| ГИДРАВЛИЧЕСКИЙ ПРЕСС | 2005 |
|
RU2307738C1 |
| Система управления гидропрессом | 1990 |
|
SU1766642A1 |
1
Изобретение относится к области обработки металлов давлением. ,
Известны системы управления гидравлическими прессами, содержаише сервомотор с кулачковым валом, взаимодействующим с распределителями главного и возвратных цилиндров, ручное управление, наполнительный клапан и наполнитель.
Для повышения производительности и улучшения условий работы предлагаемая система снабжена встроенным в магистраль между возвратными цилиндрами и их распредел1;1телем гидравлическим тормозным устройством, выполненным в виде плавающего клапана с .электрогидравлическим клапаном управления и включенного параллельно плавающему клапану регулируемого Д Е сселя, при этом электромагнит клапана управления связан с датчиком положения подвижной траверсы пресса через регулируемое ре не времени, встроенное в .систему управлени
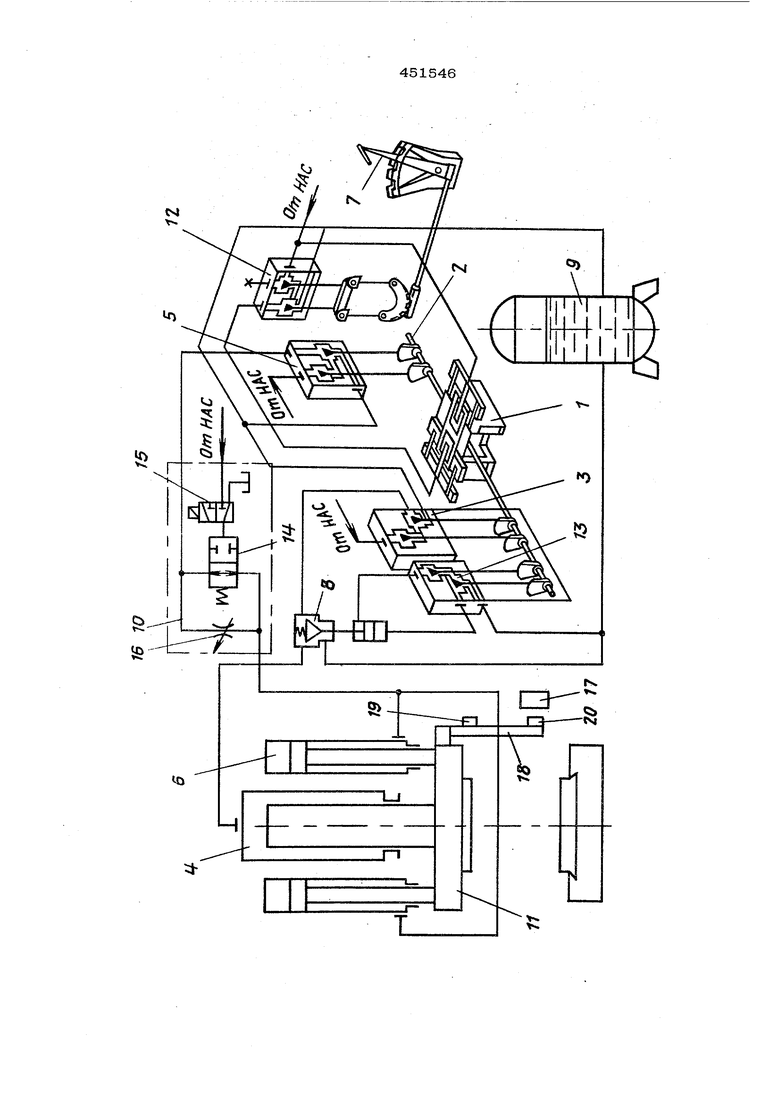
fla чертеже приведена схема предлагаемой системы.
Система улравле1шя гидравлическим прессом состоит из сервомотора 1, находящегося в постоянном зацеплении с кулачковым валом 2 распределителя 3, главного цилиндра 4, распределителя 5, возвратных цилиндров 6, ручного управления 7, наполпительного клапаьа 8,: наполните ля 9 и гидравлического тормозного устройства 10.
Главный цилиндр 4 и возвратные цилиндры 6 жестко связаны с подвижной траверсой 11 гидравлического пресса. Ручное уп-
равление 7 соединено тягой с распределителем 12 сервомотора 1. Кулачки вала 2 при помощи тяг соединены с клапанами распре- делителей 5 и 3 возвратных и главного цилиндров и распределителя 13 гвдроцилиндра
наполнительного клапана 8. В гидравлической магистрали возвратных цилиндров между распределителем 5 возвратных цилиндров 1Г1шпиндраЙ1Г в у ановлено гидравлическое тормозное устройство 1О, состоящее из
клапана 14 плавакмцего тнпа с электрогидравлическим клапаном 15 управления и выь лючения параллельно плавающему клапану дроссе/ш 16. Электромагнит электрогидрав-. лическо1Х) клапана 15 управления связан с .
бесконтактным датчиком 17попозкення
вйжной траверсы. На подвижной траверсе установлен кронштейн 18 с флажками 19 и 2О. В электрической схеме датчика 17 установлено реле времени (на чертеже
не показано)..
Система управления работает следующим
образом.
При перемещении рукоятки ручного управления 7 давлетгае через распределитель 12 подается к сервомотору 1, который поворачивает вал 2. При помощи кулачков, расположенных на валу 2, срабатьгоают клаааны распределителя 5 возвратных цилинд ров, и высокое давление от НАС подается к тормозному устройству 1О. Под дейст вием давления жидкости плавающий кла- пан 14 поднимается, жидкость через клапан и регулируемый дроссель 16 поступает в штоковые полости возвратных цилинд ров 6 и пере)/1ещает при этом траверсу 11 вверх. Одновременно при помощи соответствующих кулачков приводятся в действие клапаны распределителей 3 и 13,, обеспечивая выход рабочей жидкости из главного цилиндра 4 в наполнитель 9. При совмещении флажка 20с датчиком 17 сигнал последнего подается на электромагнит электро гидравлического клапана 15 управления плавающего клапана 14, который закрывается, и жидкость от НАС поступает только через дроссель 16, обеспечивая тем самым гншвиЫй безударный подход траверсы к ар хитраву.,С помощью реле времени регули руется продолжительность сигнала датчи™. ка 17, т. е, время торможения, после чего обесточивается электромагнит клапана 15, и плавающий клапан 14 открывается, ,
При перемещении рукоятки ручного управления 7 в обратном направлении давление через распределитель 12 отводится от сервомотора 1, и последний поворачивает вал 2 в противоположном направлении, При помощи кулачков на валу 2 распределитель возвратных цилиндров соединяет последние с наполнителем 9.. Одновременно через рас пределители 3 и 13, а также наполнитель4
ный клапан 8 рабочая жидкость от напол нителя подается в главный цилиндр 4, в результате чего траверса 11 опускается. При этом рабочая жидкость из возвратных ни- линдров вьздавливается в наполнитель 9 через тормозное устройство 10. Последнее npvi этом работает аналогично. Под давлением жидкости плавающий клапан 14 поднимается, и жидкость через дроссель 16 и клапан 14 поступает к распределителю 5 и далее - в наполнитель 9. При совмеще1гаи флажка 19 с датчиком 17 сигнал последнего подается на тормозное устройство 1О, клапан 14 закрывается, и жидкость проходит через дроссель 16 настройкой которого и определяется скорость соприкосновения траверсы с заготовкой.
Продолжительность торможения регулируется так же. как и при подъеме траверсы с помощью реле времени.
Предмет изобретения
Система управления гидравлическим прессом, содержащая сервомотор с кулачковым валом, взаимодействующим с распределителями главного и возвратных ци линдров, наполнительный клапан и наполни тель, отличающаяся тем, что, с це лью повыщения производительности и улуч шейгия условий работы, она снабжена встроенным в магистраль между возвратными ци линдрами и их распределителем гидравлическим тормозным устройством, выполнен; ным в виде плавающего клапана с электрогидравл еским клапаном управления и вк- люченного параллельно плавающему клапану регулируемого дросселя, при этом электромагнит клапана управления связан с датчиком положения подвижной траверсы пресса
через регулируемое реле времени, встроенное в систему управления.
