1
Изобретение относится к области автоматизации управления перемещениями исполнительных механизмов в металлорежущих станках.
Известное устройство позиционирования содержит силовой привод с тахогенератором и тормозной блок, связанные с рабочим органом станка.
Однако точность работы такого устройства невысока.
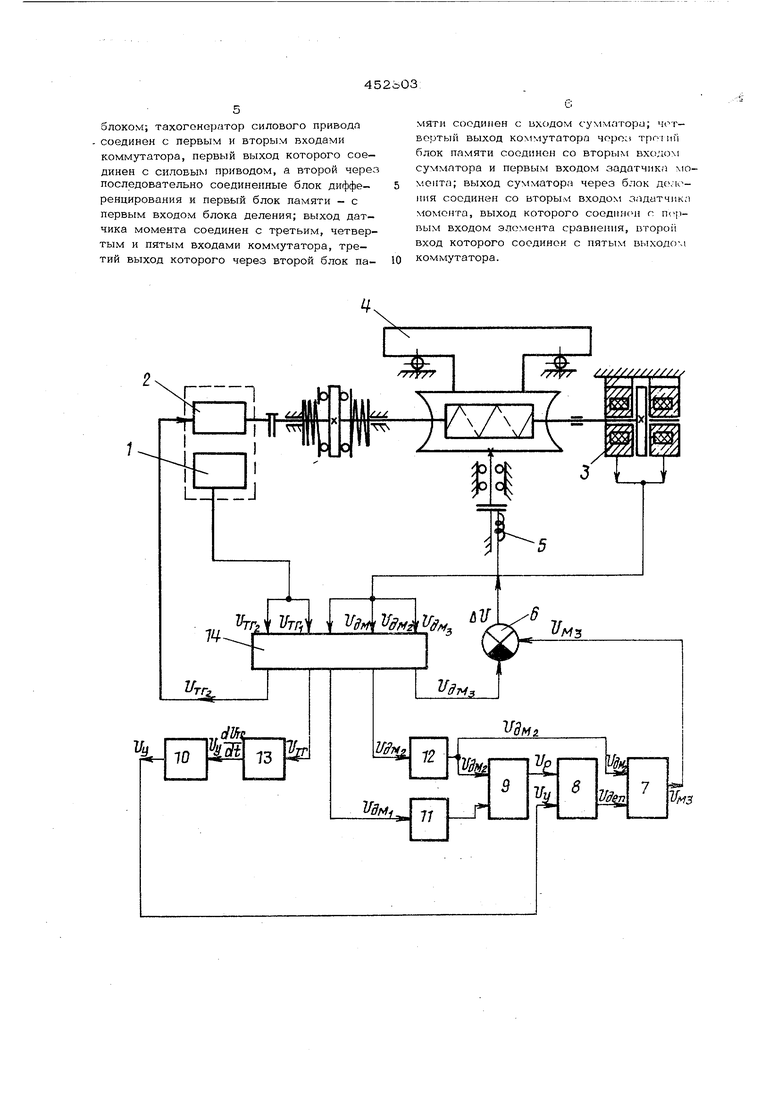
Отличием предлагаемого устройства от известного является то, что в нем установлены датчик момента, коммутатор, блок дифференцирования, первый, второй и третий блоки памяти, сумматор, блок деления, задатчик момента и элемент сравнения, выход которого соединен с тормозным блоком Тахогенератор силового привода соединен с первым и вторым входами коммутатора, первый выход которого соединен с силовым приводом, а второй выход коммутатора через последовательно соединенные блоки дифференцирования и первый блок памяти с первым входом блока деления. Выход датчика момента соединен с третьим, чет-
вертым и пятым входами коммутатора, третий выход которого через второй блок памяти соединен с первым входом сумматора. Четвертыйвъгход коммутатора через третий блок па(яти соединен с вторым входом сумматора и перрым входом задатчика момента. Выход сумматора через блок деления соединен с вторым входом задатчика момента, выход которого соединен с первым входом элемента сравнения, второй вход которого соединен с пятым выходом коммутатора.
Это позволяет уменьшить время перемещения рабочего органа станка при ограничении динамических нагрузок в системе.
Устройство представлено на чертехсе.
Устройство содержит тахогенератор 1, силовой привод 2, датчик момента 3, рабочий орган станка 4, тормозной блок 5, элемент сравнения 6, задатчик момента 7, блок деления 8, сумматор 9, первый, второй и третий блоки памяти 10, 11 и 12, блок дифференцирования 13 и .коммутатор 14.
Устройство аптоматически выбирает )ОЖ11м торможелня по параметрам, определяемым в процессе разгона и в процессе торможения, и работает в режиме регулирования, поддерживая постоянным по величине момент торможения.
В процессе разгона закон движения планшайбы поворотного стола может быть описан следующим уравнением:
м-м а54т, ,,,
д с f(1)
где М - момент, развиваемый двигателем
д
в процессе разгона;
М - момент сопротивления, вызванный силами трения;
(л) - угловая скорость планшайбы стола;
- момент инерции планшайбы стола с деталью, установленной на столе.
В процессе разгона тагогенератор 1, жестко связанный с силовым приводом 2, вырабатывает сигнал Uf f
В этот момент, времени Ь датчик момента 3 вырабатывает сигнал Ifrt М .
пропорциональный динамическому моменту i - и моменту сопротивления М . Эта
величина запоминается вторым блоком памяти. Сигнал с тахогенератора Iffj
коммутатором 14 подается на блок 13. В момент времени i; этот сигнал диффеенцируется блоком 13 и запоминается первым блоком памяти 10. Подключение тахогенератора 1 к блоку 13 и датчика момента 3 к блокам памяти осуществляется коммутатором 14. По достижении максимальной скорости планщайбой рабочего органа станка 4 датчик момента 3 подключается к третьему блоку памяти 12 В момент времени т 2 датчик момента 3
вырабатывает сигнал ЬМп Движение
планшайбы рабочего органа станка 4 при движении с максимальной скоростью описывается выражением:
(2);
и величина ЦоМл пропорциональна
М . Q
В следующий момент времени значение напряжения T/igM подаются
на сумматор 9. Выходной сигнал сумматора 9 1/р представляет собой величину
дина-
напряжения, опродоляюпуо ;ii(,-i4(4iiin , змонта ЗУ 5 , II ПОДИ подается
мического момон1
блок деления 8. Но второй вход блока 8 подается сигнал г ш рвого блока памяти 10,. препгтяв.пя1пичпг ТГд оУтГ и несущий
eft
информацию о воличине ускорения в процессе разгона. Выходное напряжение U
дел
блока 8 несет илфо)мацию о суммарном моменте инерции J и вместе с моментом сопротивления М , информацию о котором дает третий блок памяти 12, позволяет установить необходимую величину
суммарного момента торможения М , при
т
которой обеспечивается постоянство следующей суммы:
. + М + М -const
at с (ЗУ
Необходимая величина тормозного момента устанавливается на задатчике 7 ь виде напряжения uivi.,, , с которым срав-
1/дМ:
нивается сигнал
с датчика момента 3 в процессе торможения. По величине рассогласования Ди
определяемого на элементе сравнения О, регулируется момент на тормозном блоке 5 таким образом, чтобы выполнялось условие
Ojr- + M +м const.
±с т
гдеугловая скорость плоЕшшйбь
рабочего органа 4 при торможении.
Величина U(j на задатчике момено
та 7 устанавливается автоматически по заложенному в него алгоритму на основании значений Ifи If. несущих
потт
дел
дм.
информацию о wT и М .
Предмет изобретения
Устройство позиционирования, содержащее силовой привод с тахогенератором и тормозной блок, связанный с рабочим органом станка, отличающееся тем, что, с целью повыщения точности
позиционирования, в нем установлены
датчик момента, коммутатор, блок дифференцирования, первый, второй и третий блоки памяти, сумматор, блок деления, задатчик момента и элемент сравнения,
выход которого соединен с тормозным
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1983 |
|
SU1138787A1 |
| Устройство управления позиционнымпРиВОдОМ | 1979 |
|
SU847278A1 |
| Реверсивный электропривод | 1991 |
|
SU1791951A1 |
| Система позиционного управления электроприводом | 1987 |
|
SU1509826A1 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| Цифровой позиционный электропривод | 1981 |
|
SU1029366A1 |
| Устройство для автоматического управления электровозом | 1986 |
|
SU1402449A1 |
| Устройство для управления позиционным электроприводом | 1973 |
|
SU528542A1 |
| ШАГОВЫЙ ЭЛЕКТРОПРИВОД | 1988 |
|
RU2076451C1 |
| Цифровая позиционная система | 1981 |
|
SU974341A1 |
