Известны способы контроля наклонной погрешности шага зубчатых колес с использованием устройства, содержащего датчики, электрически связанные с электронным блоком и |регист1рирующим.и приборами для регист1рации результатов измерения, заключающиеся в том, что контролируемое колесо базируют на шпинделе, измеряют и суммируют отклонения окруж-ных шагов при повороте колеса и вводят в результат измерения корректирующие поправки. Однако такие способы не обеспечивают требуемой точности измерений, поскольку не компенсируют накопленную ошибку измерений, обусловленную неточностью настройки датчиков на номинальный окружной шаг.
Для повышения точности контроля датчики настраивают по эталону на но.минальный окружной шаг и на часть окружности, равную выбранному числу номинальных шагов, обеспечивают противоположные погрешности настройки на номинальный окружной шаг и указанную часть окружности посредством поднаст1ройки одного из датчиков после первого замера, измеряют и суммируют отклонения соседних шагов, расположенных на этой части окружности, погрешность шага па этой же части окружности, полученную погрешность дополнительно суммируют с результатамл измерения отклонения окружных шагов на последующей части окружности и погрешностей шага на предыдущих частях окружности колеса.
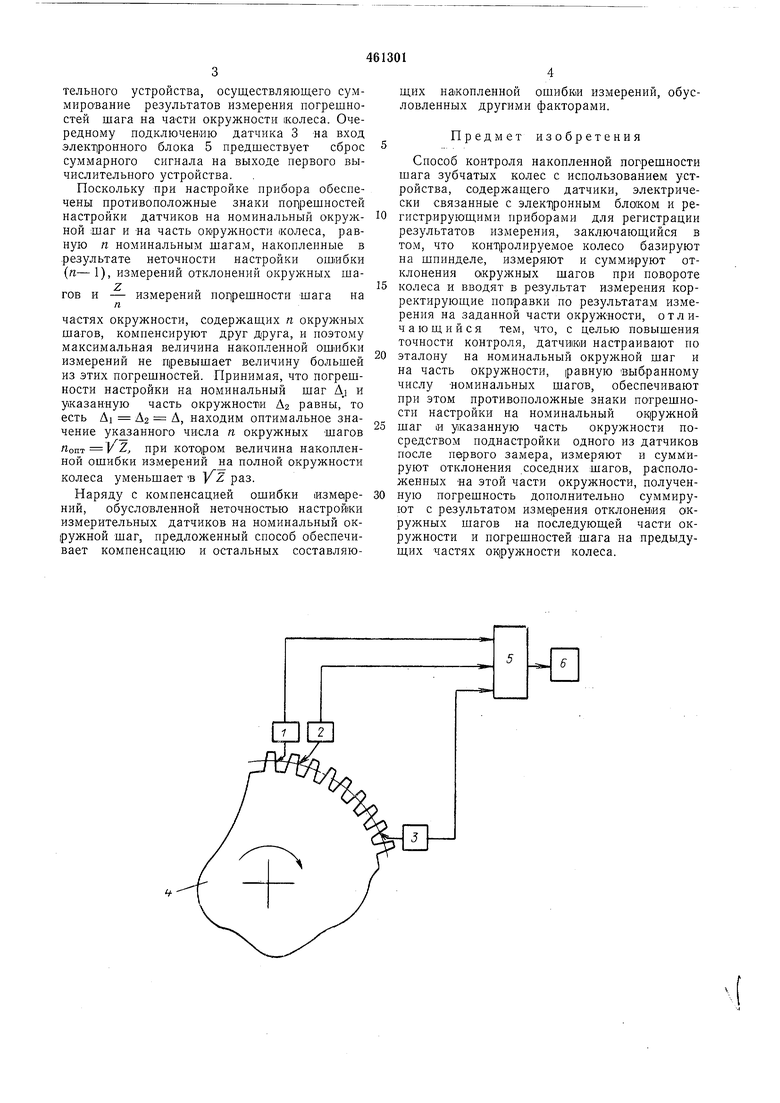
На чертеже изображена блок-схема устройства для автоматического конт1роля накопленной погрешности шага.
Измерительные датчики 1 и 2 выставляются на номинальный окружной шаг, а датчики 1 и 3 - на дуговое расстояние, равное определенному числу п номинальных окружных шагов, по делительной окружности зубчатого колеса 4.
Измерения осуществляются автоматически при вращении колеса 4, установленного на
шпинделе. Измерительные сигналы датчиков обрабатываются в электронном блоке 5, на выход которого подключено регистрирующее устройство 6. После каждых (п-1) измерений счетное устройство (на чертеже не показано), управление которым осуществляется изме|рительными сигналами одного из датчиков, отключает датчик 2 от электронного блока 5 и подключают на вход электронного блока датчик 3. Одно из суммирующих устройств электронного блока 5 осуществляет суммирование результатов измерения отклонения (п-1) окружных шагов и дополнительно после первого измерения на части окружности суммирование их с результатами,
полученными посредством второго вычислительного устройства, осуществляющего суммирование результатов измерения погрешностей шага на части окружности колеса. Очередному подключению датчика 3 на вход элект|ронного блока 5 предшествует сброс суммарного сигнала на выходе первого вычислительного устройства.
Поскольку при настройке прибора обеспечены противоположные знаки погрешностей настройки датчиков на номинальный окружной шаг и -на часть окружности колеса, равную п номинальным шагам, накопленные в результате неточности настройки ошибки (п- 1), измерений отклонений окружных шаZ
гов и - измерении пог|решности шага на
п
частях окружности, содержащих п окружных шагов, компенсируют друг друга, и поэтому максимальная величина накопленной ошибки измерений не превышает величину большей из этих погрешностей. Принимая, что погрешности настройки на номинальный шаг AI и указан-ную часть окружности А2 равны, то есть А Дз А, находим оптимальное значение указанного числа п окружных шагов , при котором величина накопленной ошибки измерений на полной окружности
колеса уменьшает в раз.
Наряду с компенсацией ошибки 1изме|рений, обусловленной неточностью настройки измерительных датчиков на номинальный окружной шаг, предложенный способ обеспечивает компенсацию и остальных составляющих накопленной ошибки измерений, обусловленных другими факторами.
Предмет изобретения
.....
Способ контроля накопленной погрешности шага зубчатых колес с использованием устройства, содержащего датчики, электрически связанные с эл.ект|ронным блоком и регистрирующими приборами для регистрации результатов измерения, заключающийся в том, что конт|ролируемое колесо базируют на шпинделе, измеряют и суммируют отклонения окружных щагов при повороте колеса и вводят в результат измерения корректирующие поправки по результатам измерения на заданной части окруж-ности, отличающийся тем, что, с целью повышения точности контроля, датчики настраивают по эталону на номинальный окружной шаг и на часть окружности, равную выбранному числу -номинальных шагов, обеспечивают при этом противоположные знаки погрешности настройки на номинальный ок|ружной шаг и указанную часть окружности посредством поднастройки одного из датчиков после первого замера, измеряют и суммируют отклонения соседних шагов, расположенных яа этой части окружности, полученную погрешность дополнительно суммируют с результатом измерения отклонения окружных шагов на последующей части окружности и погрешностей шага на предыдущих частях окружности колеса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ активного контроля погрешностей зубчатых колес | 1982 |
|
SU1047626A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2010 |
|
RU2436045C1 |
| Прибор для двухпрофильного контроля цилиндрических зубчатых колес | 1990 |
|
SU1712770A1 |
| Устройство для измерения накопленной погрешности шага зубчатого колеса | 1978 |
|
SU868308A1 |
| Устройство для контроля окружного шага и накопленной погрешности зубчатых колес | 1989 |
|
SU1719880A1 |
| Прибор для измерения погрешностей шага червячных и зубчатых колес | 1973 |
|
SU533814A1 |
| СПОСОБ УПРАВЛЕНИЯ МОЩНОСТЬЮ РЕАКТИВНЫХ ГИДРАВЛИЧЕСКИХ ТУРБИН | 2017 |
|
RU2636603C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ЗАКРУТКИ ВАЛА, ЗАКРУЧЕННОГО ДЕЙСТВИЕМ КРУТЯЩЕГО МОМЕНТА С ИСПОЛЬЗОВАНИЕМ ШКАЛЫ НОНИУСА ПРИ НЕПРЕРЫВНО ВРАЩАЮЩЕМСЯ ВАЛЕ | 1992 |
|
RU2107271C1 |
| Способ контроля кинематической точ-НОСТи зубчАТыХ КОлЕС | 1979 |
|
SU846990A1 |
| УСТРОЙСТВО для ДЕЛЕНИЯ И КОНТРОЛЯ УГЛОВ | 1972 |
|
SU324482A1 |
