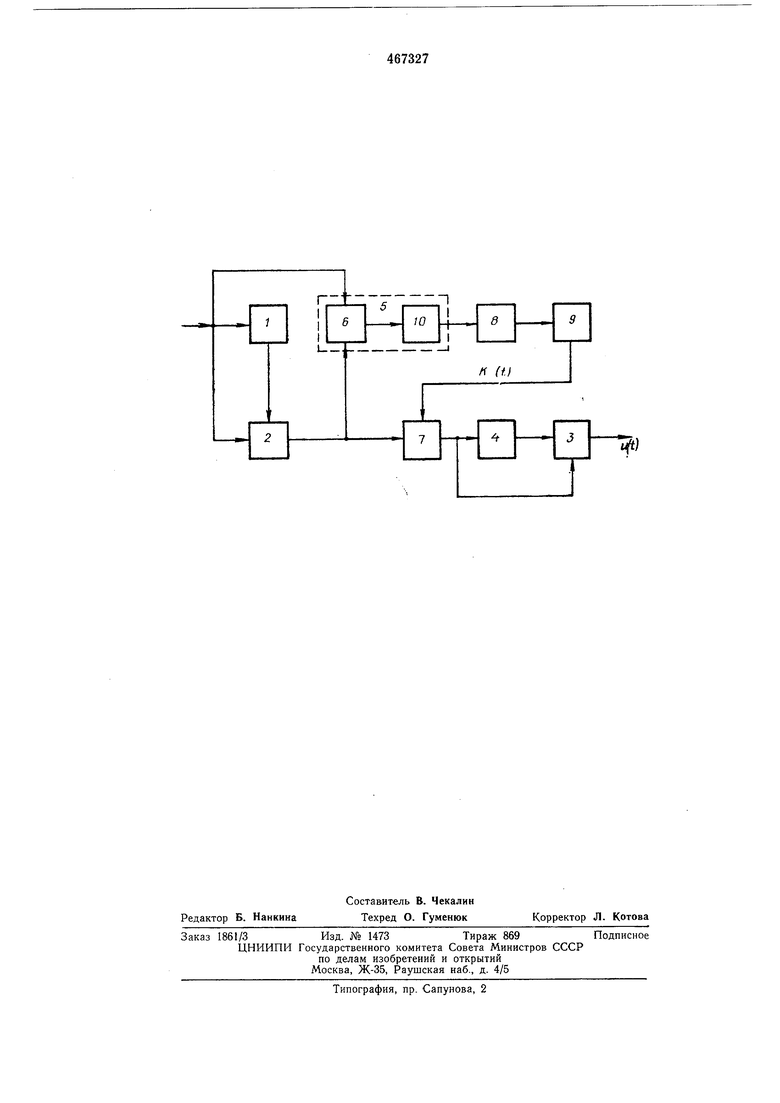
ходная координата объекта л:; А, - параметр настройки; /((г) -коэффициент усиления регулятора; t - время; - переменная интегрирования. Сигналы X и X поступают на входы сумматора 2, выходная величина которого - первый входной сигнал блока умножения 7, на второй вход которого подается спгпал, равный по значению K.(t). Выходной сигнал регулятора формируется сумматором 3, на первый вход которого поступает выходной сигнал блока умножения 7, а на второй вход - выходной сигнал интегратора 4, «а вход которого поступает выходной сигнал блока умножения 7. При этом сигнал, определяющий коэффициент усиления регулятора K(t), является выходным сигналом ограничителя 9 линеной зоны, на вход которого поступает сигнал, равный усредненному с помощью инерционного авепа 8 значению (x,g), причем I Н-. g) где g - прямая, лежащая во II и IV квадрантах фазового пространства (х,х); а, р- параметры настройки, . Функция (x,g) формируется с помощью блочка умножения 6, на входы которого поступают выходной сигнал объекта и выходной сигнал сумматора 2, и двухпозиционного реле 10, уровень полок которого а, р устанавливается в процессе настройки регулятора. Выходной сигнал с двухпозиционного реле 10 поступает на вход инерционного звена 8, а выходной сигнал /С(О ограничителя 9 Л;Инейной зоны ноступает на второй вход блока умножения 7. Изменение параметров объекта приводит к двум случаям: 1) переходные процессы становятся колебательными, колебательпо-пеустойчивыми; 2) переходные процес еы становятся апериодическими, настолько медленными, что перестают удовлетворять треоовавиям на качество переходного процесса. В первом случае среднее значение I,(t) па переходном процессе уменьшается, так как часть времени переходного процесса ti, при котором , уменьшилось, а время 4, при котором xg.0, увел:ичилось. Это нриводит к уменьшению общего коэффициента контура регулирования и повышению устойчивости. Во втором случае K.(t) увеличивается, так как часть времени переходного процесса /ь при котором , увеличилась, а время 2, при KOTODOM .Q, уменьщилось. Тем са.мым улучшается качество переходных процессов. Следует отметить, что конструктивное решение логического блока 5, состОЯщего из блока умножения 6 и двухпозиционного реле 10, существенно проще применяемых в известных адаптивных регуляторах логических блоков. Предмет изобретения Адаптивный регулятор с переменной структурой, содержащий последовательно соединенные первый сумматор, блок умножения, интегратор и второй сумматор, .к другому входу которого подключен выход блока умножения, дифференциатор, вход которого подсоединен к первому входу, а выход - к второму входу первого сумматора, и последовательно соединенные инерционное звено и ограничитель линейной зоны, выход которого подключен к второму входу блока умножения, отличающийся тем, что, с целью упрощения регулятора, он содержит последовательно соединенные дополнительный блок умножения и двухпозиционное реле, подключенное к инерционному звену, входы дополнительного блока умножения соединены соответственно с первым входом и выходом первого сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный регулятор | 1977 |
|
SU746414A1 |
| Адаптивный регулятор с переменной структурой | 1973 |
|
SU460529A1 |
| Регулятор с переменной структурой | 1978 |
|
SU736046A1 |
| Адаптивный регулятор с переменной структурой | 1973 |
|
SU451983A1 |
| Устройство адаптации | 1979 |
|
SU813358A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2369893C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| Система управления нестационарными объектами | 1984 |
|
SU1191883A1 |
| Пневматический регулятор | 1978 |
|
SU840796A1 |