тора 2 в момент пуска регулятора; а-параметр настройки, характеризующий скорость настройки регулятора; i(t)-выходной сигнал блока 5 ограничения выходных значении сумматора 4. Причем
|г(/)С-r(t), еслиг(/)0 или /(0 /(0 ..0(3)
1 О, если r(f)0 и К (f), где С - величина уставки; /Cmi - минимально допустимое значение K(t); r(t) -обобщенный показатель частотных свойств системы.
Сигнал /(/) формируется следующим образом.
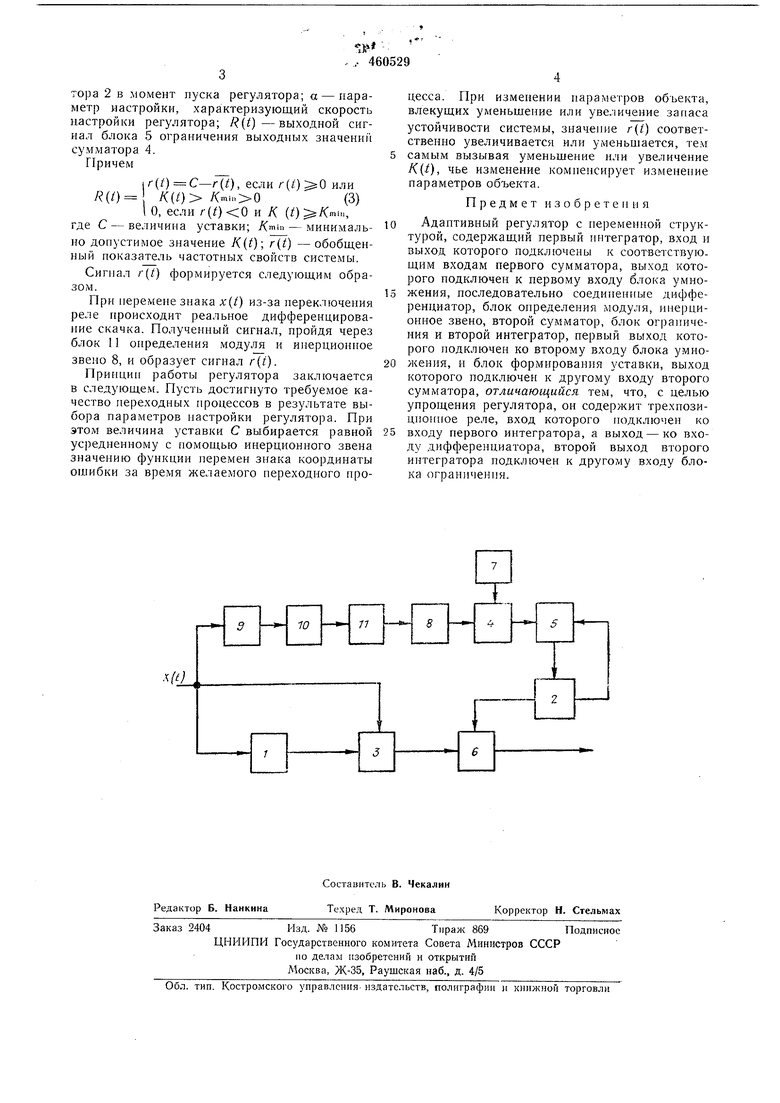
При перемене знака x(t) из-за переключения реле происходит реальное дифференцирование скачка. Полученный сигнал, пройдя через блок 11 онределения модуля и инерционное звеио 8, и образует сигнал r(i}.
Принцип работы регулятора заключается в следующем. Пусть достигнуто требуемое качество гтереходных процессов в результате выбора параметров настройки регулятора. При этом величина уставки С выбирается равной усредненному с помощью инерционного звена значению функции перемен знака координаты ошибки за время желаемого переходного процесса. При изменении параметров объекта, влекущих уменьщение или увеличение запаса устойчивости системы, значе1П1е r{t) соответственно увеличивается или уменьшается, тем самым вызывая уменьшение или увеличение K(t), чье изменение комненсирует изменение параметров объекта.
Предмет изобретения
Адаптивный регулятор с переменной структурой, содержащий первый интегратор, вход и выход которого подключены к соответствующим входам первого сумматора, выход которого подключен к первому входу блока умножения, последовательно соедипенгсые дифференциатор, блок определения модуля, инерционное звено, второй сумматор, блок ограничения и второй интегратор, первый выход которого подключен ко второму входу блока умножения, и блок формирования уставки, выход которого подключен к другому входу второго сумматора, отличающийся тем, что, с целью упрощения регулятора, он содержит трехпозициоппое реле, вход которого подключен ко
входу первого интегратора, а выход-ко входу дифференциатора, второй выход второго интегратора подключен к другому входу блока ограничения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Адаптивный регулятор с переменной структурой | 1973 |
|
SU467327A1 |
| Устройство адаптации | 1979 |
|
SU813358A1 |
| Регулятор для объектов с переменным запаздыванием | 1976 |
|
SU579597A1 |
| Система регулирования объекта с запаздыванием | 1986 |
|
SU1397875A1 |
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
| Способ автоматического регулирования частоты вращения ротора синхронного генератора и регулятор для его реализации | 2023 |
|
RU2823536C1 |
| Адаптивный регулятор с переменной структурой | 1973 |
|
SU451983A1 |
| Адаптивный регулятор | 1977 |
|
SU746414A1 |
| Регулятор для объектов с переменным запаздыванием | 1982 |
|
SU1078407A1 |
