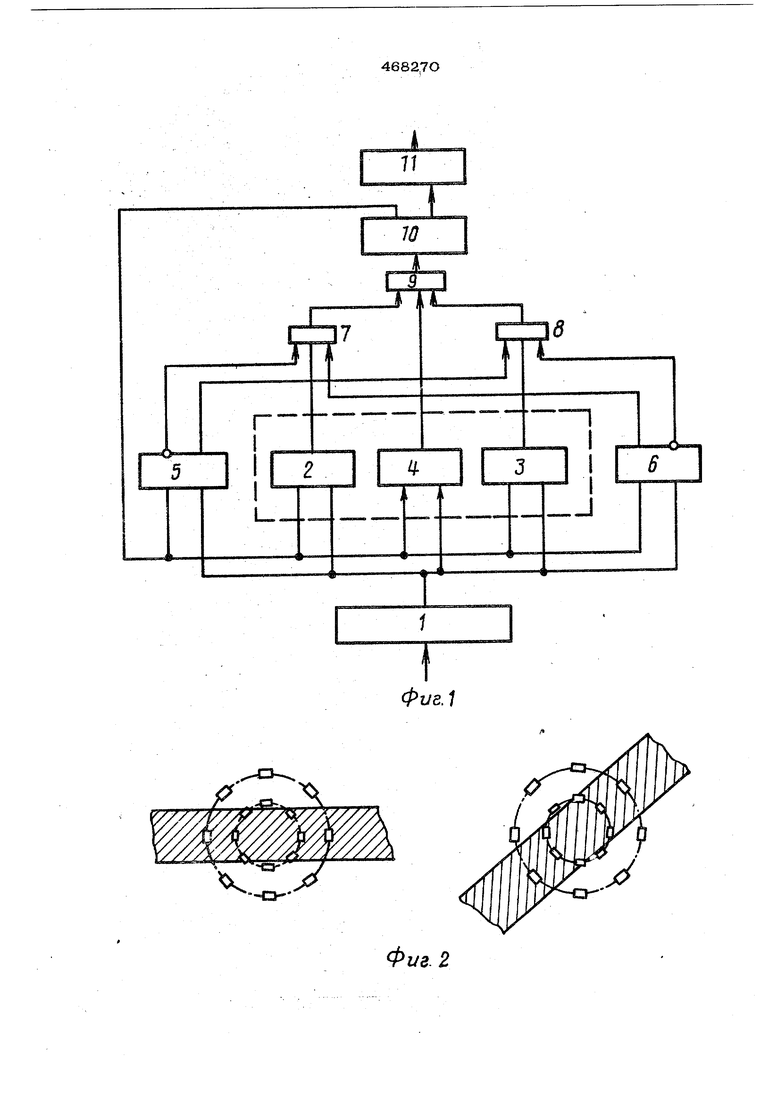
(54) СЛЕДЯЩАЯ СИСТЕМА ДЛЯ УСТРОЙСТВА СЧИТЫВАНИЯ ся группой датчиков малой окружности, | : нормально расположенных на темном поле J носителя. Сигнал рассогдасо ания вьфаба тывается блоком 4 при попадании хотя бы; одного датчика на светлое поле; переме- I щение фотоголовки корректируется в на1правлении, обеспечивающем нормальное : расположение датчиков. Слежение за краем линии осуществляется нормально расположенным на светлом поле фотодатчиком малой окружности и прилегающими к нему датчиками этой окружности, расположенными на темном поле. Сигнал рассогласования вырабатывается блоком 2для левого и блоком 3 для правого края линии.. Сигнал с выхода блока 4 поступает на :логический элемент 9 ИЛИ, выход которого соединен со входом анализатору направления перемещения Ю непосре;|ртвенно а сигналы с выходов блоков 2 и 3 - че- рез соответствующие логические элементы И 7 и 8, другие входы которых подключены соответственно к инверсному выходу блока выделения помех с этого края и к прямому выходу блока выделения помех ;С противоположного линии. Наличие помехой определяется при одновременном попадании на темное поле нормал но расположенных на светлом поле с одной стороны линии датчика малой и хоты бы одного датчика большой окружности. Сигнал на первом выходе любого блока выделения помех соответствует наличию, а сигнал на инверсном выходе - отсутствию помехи. При отсутствии лнбо наличии помех одновременно с двух сторон линии на вход ана лиаатора направления перемещения 10 проходит сигнал рассогласования тчэлько с блока 2. Предмет изобретения Следящая система для устройства счи-i тывання графической информации, содержа- щая подвижную чувствительную фотоголов ку с блоком фиксаш1и состояний датчиков фотоголойки, расположенных по двум концентрическим окружностям, блоки выделения помех, входы которых соединены с блоком фиксации состояний датчиков и анали- / затором направления перемещения, а выходы подключены к логическим элементам И, соединенным с логическим элементом ИЛИ, блок управления двигателями, подключенный к анализатору направления перемещения, отличающаяся тем, i что, с целью повышения точности слежения,, (Она содержит блок выработки сигналов рас-1 согласования по оси линии, соединенный с блоком фиксации состояний датчиков не- , посредственно и через логический элемент И с анализатором направления црремещения, и блоки выработки сигналов рассог- ласования по краям линии, входы которых i подключены к блоку фиксации состояний { датчиков и анализатору направления пере- j мещения, а выходы соединены с логическим элементом И.

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифроаналоговая следящая система | 1989 |
|
SU1700536A1 |
| Малогабаритная зенитная управляемая ракета | 2018 |
|
RU2694932C1 |
| Следящий электропривод с фотоэлектрическим управлением | 1974 |
|
SU517910A1 |
| Устройство для считывания гра-фичЕСКОй иНфОРМАции | 1976 |
|
SU798907A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 1997 |
|
RU2122175C1 |
| УСТРОЙСТВО ГИДРОМЕТЕОРОЛОГОАКУСТИЧЕСКИХ НАБЛЮДЕНИЙ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2005 |
|
RU2300781C1 |
| Устройство для ввода графической информации | 1978 |
|
SU742982A1 |
| Устройство для автоматического слежения за сварным швом | 1983 |
|
SU1094690A1 |
| Устройство слежения за информационной дорожкой оптического носителя информации | 1990 |
|
SU1777172A1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
Т
Фve.1
НЭ
.2
