1
Изобретение касается загрузочных устройств станков и может найти применение в различных отраслях техники, например станкостроении и других отраслях.
Известны захватные устройства для деталей, транспортируемых по позициям автомата, например сортировочного, содержащие смонтированные в корпусе и выполненные в виде двуплечих рычагов захватные лапы, взаимодействующие с толкателем.
Цель изобретения - повыщение точности базирования деталей.
Это достигается тем, что захватные лапы установлены на общей для них оси, а толкатель выполнен в виде вилки с хвостовиком и подпружинен на захватные лапы.
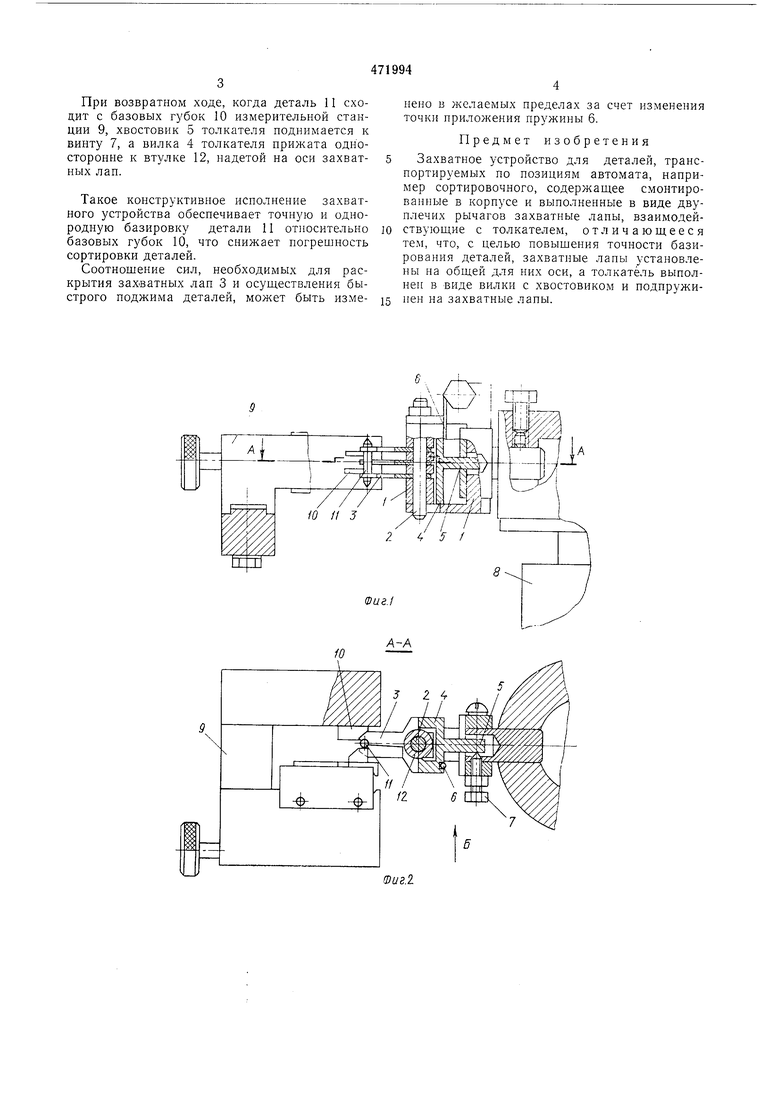
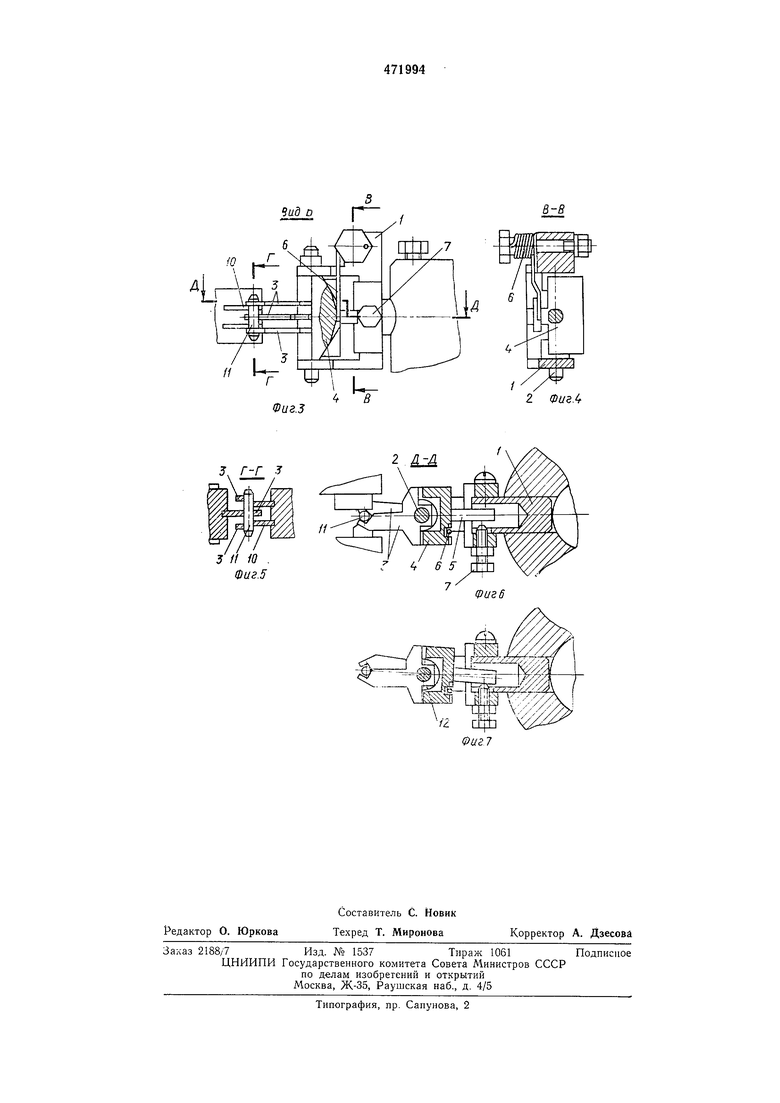
На фиг. 1 изображено предлагаемое устройство; на фиг. 2 -разрез по А-А на фиг. 1; на фиг. 3 - вид но стрелке Б на фиг. 2; на фиг. 4 - разрез но В-В на фиг. 3; на фиг. 5 - разрез по Г-Г на фиг. 3; на фиг. 6 - разрез по Д-Д на фиг. 3; на фиг. 7 - захватное устройство.
Устройство включает корпус 1 и подвижно установленные на общей оси 2 три угловых рычага - захватные лапы 3. Форма всех трех захватных лап (см. фиг. 3 и 6) одинакова, только средняя лапа своей захватной поверхностью установлена навстречу крайним. Плоский угловой рычаг, образующий лапу.
имеет два симметрично выдвинутых плеча, взаимодействующих при работе с торцами толкателя 4, образующими вилку. Толкатель 4 выполнен с хвостовиком 5. Одно плечо толкателя 4 поджато пружиной 6. В корпусе 1 смонтирован регулировочный винт 7, регулирующий угловое полол ение толкателя.
Захватное устройство закреплено на манипуляторе 8 и соверщает относительно контрольно-измерительпой станции 9 возвратпопоступательное движение.
Па рабочей позиции контрольно-измерительной станции 9 имеются базовые губки 10,
на которые захватное устройство кладет измеряемую деталь И. Пружина 6 поджимает вилку толкателя 4 к цилиндрической новерхности втулки 12. Захватное устройство с деталью И нолучает возвратно-поступательное
движение, во время которого наезжает на неподвижную базовую губку 10 контрольно-измерительной станции 9. Захватные лапы 3 поворачиваются в пределах зазора, образованного между хвостовиком 5 толкателя 4
н винтом 7, и прижимают деталь И к губкам 10 с заданной силой, т. е. с силой поджима пружины 6, которая по своей величине меньще силы, необходимой для раскрытия захватных лап 3. Поворот происходит без нарушения фиксации детали 11 в лапах 3.
При возвратном ходе, когда деталь II сходит с базовых губок 10 измерительной станции 9, хвостовик 5 толкателя поднимается к винту 7, а вилка 4 толкателя прижата односторонне к втулке 12, надетой на оси захватных лап.
Такое конструктивное исполнение захватного устройства обеспечивает точную и однородную базировку детали 11 относительно базовых губок 10, что снижает погрешность сортировки деталей.
Соотношение сил, необходимых для раскрытия захватных лан 3 и осуществления быстрого поджима деталей, может быть изменено Б желаемых пределах за счет изменения точки приложения пружины 6.
Предмет изобретения
Захватное устройство для деталей, транспортируемых по позициям автомата, например сортировочного, содержащее смонтированные в корпусе и выполненные в виде двуплечих рычагов захватные лапы, взаимодействующие с толкателем, отличающееся тем, что, с целью повышения точности базирования деталей, захватные лапы установлены на обшей для них оси, а толкатель выполнен в виде вилки с хвостовиком и подпружинен на захватные лапы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для сортировки деталей,имеющих форму тел вращения | 1982 |
|
SU1009538A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Устройство для контроля профиля пера заготовки турбинной лопатки | 1989 |
|
SU1620809A1 |
| Устройство для установки упругих замков | 1986 |
|
SU1296349A1 |
| Самоцентрирующие тиски | 1991 |
|
SU1796436A1 |
| Фрезерный станок для обработки деревянных заготовок | 1988 |
|
SU1630884A1 |
| Транспортно-технологический ротор | 1987 |
|
SU1498565A1 |
| Захватное устройство | 1987 |
|
SU1426784A1 |
| Манипулирующее устройство | 1978 |
|
SU674890A2 |
| Устройство для ориентации, базирования и подачи листовой заготовки в рабочую зону пресса | 1991 |
|
SU1784376A1 |
Фиг.1
В
Фиг.З
5, Г-Г .7
.
и
