Ступня 9 (см. фиг. 3) включает опорную пяту 13, соединенную со штоком 14, подвижно размещенным в отверстии плунжера 8 и имеющим пружину 15. На штоке 14 установлен унор 16, взанмодействуюнип с конечным выключателем 17 и являющийся индикатором касания ступни 9 поверхности груита 10. Резиновая оболочка 18 защищает от попадания грязи.
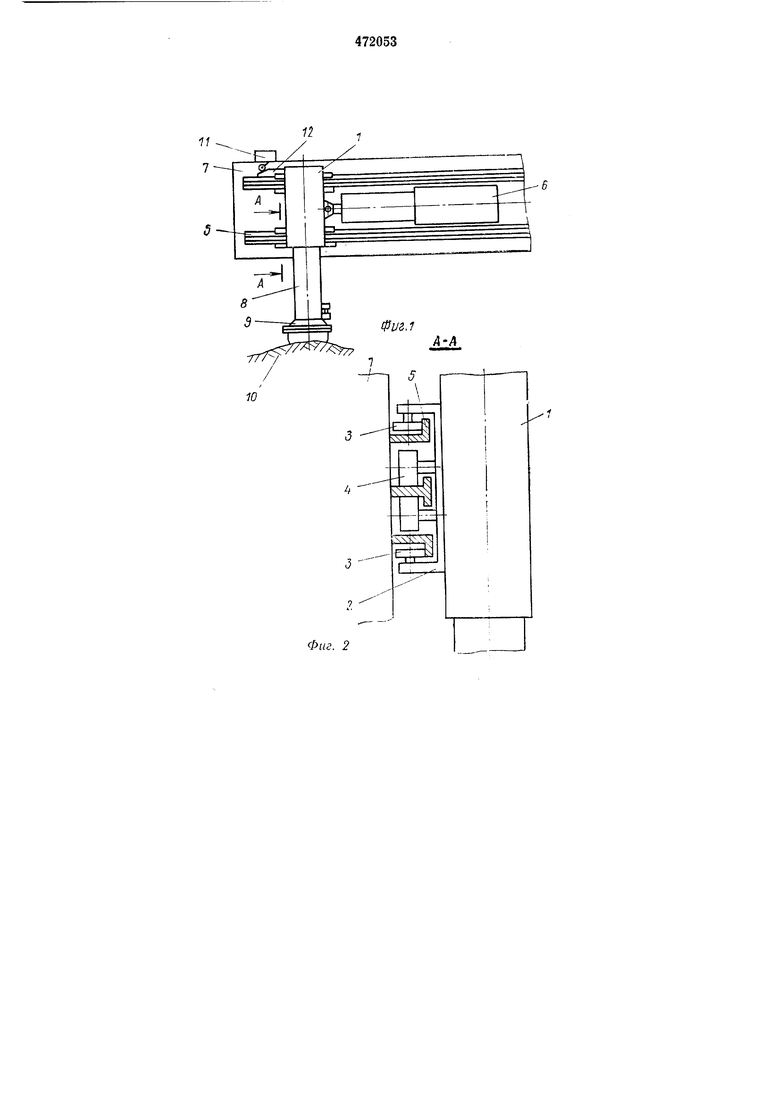
Перемещение ноги происходит по этапам. Во время движения каретки 2 внерелт, нлунн- ер 8 поднят в верхнее положение. В конце переноса ноги (см. фиг. 4,а) клиновидный упор 12 взаимодействует с переключателем 11, который реверсирует гидроцилиндр 6 и включает вертикальный гидроцилиндр 1. Каретка 2 с ногой начинает двигаться назад, а плунжер 8 - опускаться. В силу равенства величин скоростей каретки 2 и корпуса 7 транспортного средства и противоположности их направлений горизонтальная составляющая скорости ступни 9 относительно опорной поверхности грунта 10 равна нулю. Поэтому встреча ступни 9 с иоверхностью грунта 10 не сопровождается горизонтальным ударом. После касания ноги поверх.иости груита упор 16 плунжера 8 воздействует на конечный выключатель 17, который, управляя гидросистемой транспортного средства, поекращает опускание плунжера 8 (см. фиг. 4,6). В то же время каретка 2 с ногой продолжает движение назад с постоянной скоростью по направляющим 5. Корпус 7 транспортного средства также продолжает горизонтальное передвижение вперед с постоянной скоростью без подъемов или опускания, связанных с неровностями почвы. При достижении кареткой 2 крайнего заднего положения управляющее устройство (на чертеже не показано) производит реверс силового гидроцилиндра 6 и переключает гидросистему транспортного средства на подъел плунжера 8 в вертикальном гидроцилиндре 1 (см. фиг. 4,в). После этого начинается новый цикл движения ноги.
Предложенное устройство позволяет трапспортному средству двигаться в условиях бездорожья с высокой комфортабельностью, без вертикальных толчков.
Пред .м е т и з о б р е т е н и я
1.Механизм перемещения ноги шагающего движителя, содержащий вертикальный гидроцилиндр с опорной пятой на его плуижере, установленный в горизонтальных направляющих корпуса транспортного средства с возможностью возвратно-поступательного движения от горизонтального гидр о цилиндр а, и устройство для управления работой этих
гидроцилиндров, отличающийся тем, что, с целью повышения проходимости по пересеченной местности, опорная пяти соединена с плунжером подвижно посредством подпружиненного штока, взаимодействующего с конечным выключателем, установленным на плунжере.
2.Механизм по п. 1, отличающийся тем, что, с целью повышения надежпости его в работе, опорная пята размещена в эластичной
защитиой оболочке, прикреплеппом к нижней части плунжера.
12
11 7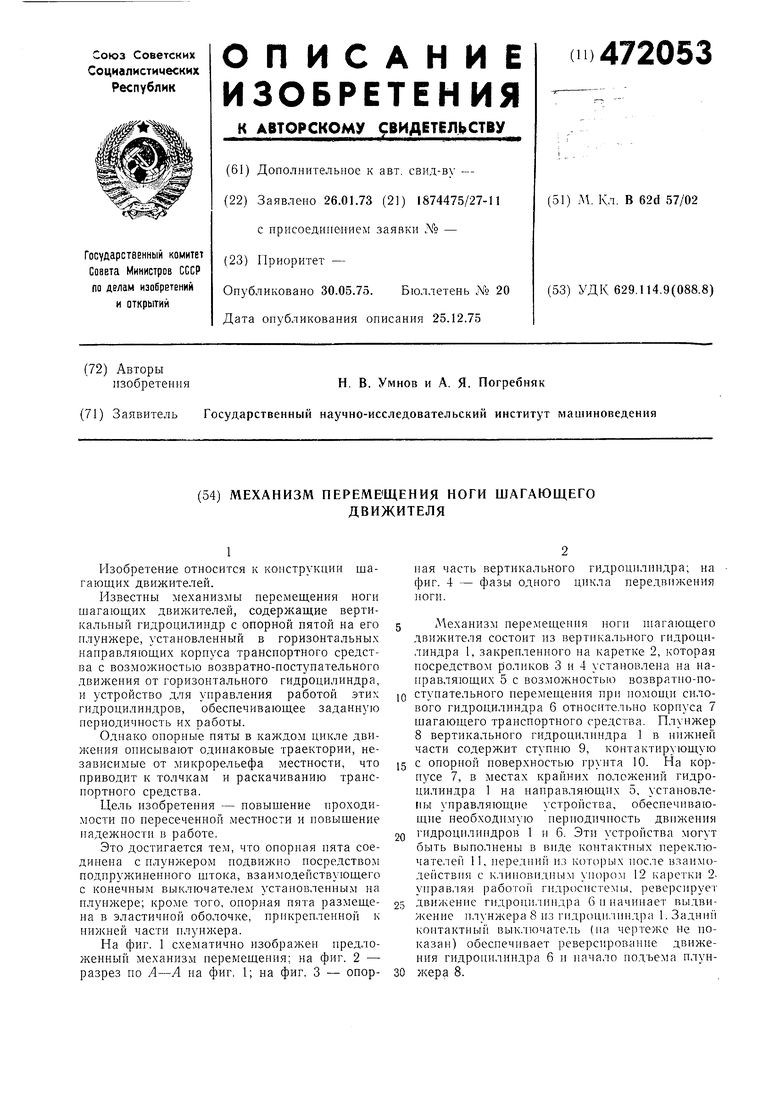

| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм вертикального перемещения стопы шагающего движителя | 1983 |
|
SU1106722A1 |
| Шагающее транспортное средство | 1977 |
|
SU686930A1 |
| МОБИЛЬНЫЙ ПЕРЕНОСНОЙ КОПЕР | 2000 |
|
RU2203359C2 |
| Транспортное средство повышеннойпРОХОдиМОСТи | 1979 |
|
SU844452A1 |
| Устройство для самовытаскивания транспортного средства с гусеничных движителем | 1991 |
|
SU1837029A1 |
| Устройство для управления положением шагающего экипажа | 1977 |
|
SU765094A1 |
| Кессон-машина для строительства и ремонта подземных трубопроводов | 1987 |
|
SU1479571A1 |
| Самосвальное транспортное средство | 1977 |
|
SU827336A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО СО СМЕННЫМ КУЗОВОМ ДЛЯ ПЕРЕВОЗКИ НАСЫПНЫХ СЕЛЬСКОХОЗЯЙСТВЕННЫХ ГРУЗОВ МАЛОЙ ПЛОТНОСТИ | 2011 |
|
RU2481998C1 |
| Модуль колёсно-гусеничного движителя и шасси с двумя модулями | 2022 |
|
RU2784225C1 |

10
Фиг. 2
1b
