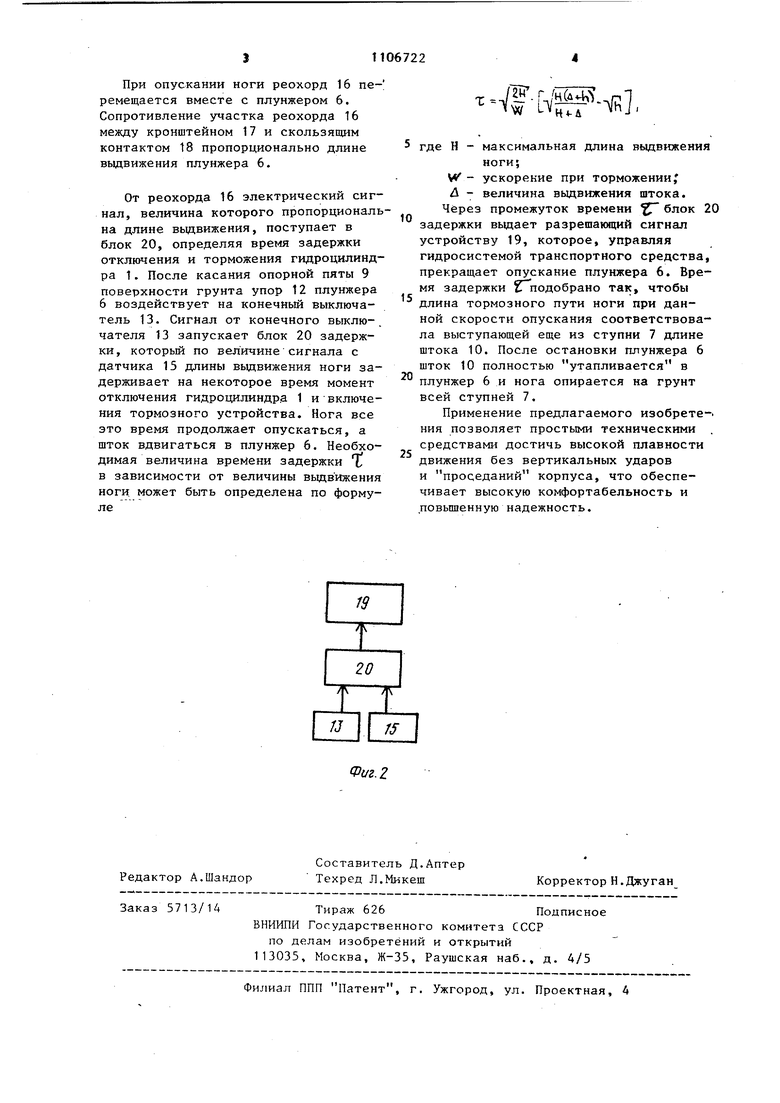
Изобретение относится к транспорт ной технике, и более конкретно к конструкции шагающих движителей. Известен шагающий движитель, механизм вертикального перемещения которого выполнен в виде вертикального гидроцилиндра с опорной пятой, жестко прикрепленной к концу его плунжера, и устройства управления работой гидроцилиндра flj . Недостатком движителя является неизменность величины вертикального перемещения плунжера при каждом шаге, в результате чего описанный движитель плоко приспосабливается к неровностям рельефа местности. Наиболее близким к изобретению по технической сущности и достигаемому результату является мег анизм вертикального перемещения стопы шагающего двилдателя, содержащий вертикальный гидроцилиндр с опорной пятой, установленной в нижнем конце плунжера цилиндра на подпружиненном штоке, взаимодействующем с конечным выключателем, установленным на плунжере, и устройство управления работой гидроцилиндра 2J. Недостаток известного механизма заключается в том, что безударное опускание ноги на грунт обеспечивае ся только при некоторой одной скоро ти выдвижения плунжера, которая соо ветствует длине пути, проходимого ступней за время торможения ноги. П повЕлиении скорости шагающего транспортного средства необходимо сокра щение продоллштельностй опускания н ги. А, так как скорость встречи ног с грунтом тем больше, чем больше длина ее выдвижения, то безударная ходьба реализуется только на одйой определенной высоте ходьбы, которая соответствует номинальной длине выдвижения ноги. В случае, если нога вьщвигается больше номинальной длин например, при опускании в углублени то в момент касания ступней грунта происходит удар. В случае же наступ ния на выступ, нога останавливается тормозным устройством до того, как она обопрется на грунт всей ступней и весь шток утопится в ногу. Поскольку пружина штока не рассчитана на воспринятие веса корпуса,он вместе с ногой проседает, пока ступня встанет грунт и шток полностью 11, в ногу. Все это вызыутопится22 вает вертикальные колеба сия корпуса транспортного средства, а также удары, которые могут привести к поломкам движителя. Цель изобретения - повышение плавности движения и надежности в работе. Поставленная цель достигается тем, что механизм вертикального перемещения стопы шагающего движителя, содержащий вертикальный гидроцилиндр с опорной пятой, установленной в нижнем конце плунжера цилиндра на подпружиненном штоке, взаимодействующем с конечным выключателем, установленным на плунжере, и устройство управления работой гидроцилиндра, снабжен датчиком длины вьивижения плунжера, а в устройство управления введен блок задержки выключения вертикального гидроцилиндра, связ анный с конечным выключателем и датчиком длины выдвижения. На фиг. 1 изображен механизм вертикального перемещения, общий вид на фиг. 2 - блок-схема его управления. Механизм вертикального перемещения ртопы шагающего движителя состоит из вертикального гидроцилиндра 1, закрепленного на каретке 2, которая установлена на направляющих 3 с возможностью возвратно-тгоступательного перемещения при помощи горизонтального гидроцилиндра 4 относительно корпуса 5 ша-гающего транспортного средства. Плунжер б вертикального гидроцилиндра 1 в нижней части содержит ступню 7, контактирующую с опорной поверхностью грунта 8. Ступня 7 содержит опорную пяту 9, соединенную со штоком 10, подвижно размещенным в отверстии плунжера 6 и имеющим пружину 11. На штоке 11 установлен упор 12, взаимодействующий с конечным выключателем 13 и являющийся индикатором касания ступни 7 поверхности грунта 8. Пята 9 защищена резиновой оболочкой 14. Датчик 15 длины выдвижения (фиг. 2) плунжера 5 выполнен, например, в виде реохорда 16, закрепленного кронштейном 17 к плунжеру 6 и связанного со скользящим контактом 18, установленным неподвижно на гидроцилиндре 1. .Устройство 19 управления (фиг. 2) содержит блок 20 задержки, связанный с конечным выключателем 13 и датчиком 15 длины выдвижения. Механизм работает следующим образом.
При опускании ноги реохорд 16 перемещается вместе с плунжером 6. Сопротивление участка реохорда 16 между кронштейном 17 и скользящим контактом t8 пропорционально длине выдвижения плунжера 6.
От реохорда 16 электрический сигнал, величина которого пропорциональна длине выдвижения, поступает в блок 20, определяя время задержки отключения и торможения гидроцилиндра 1. После касания опорной пяты 9 поверхности грунта упор 12 плунжера 6 воздействует на конечный выключатель 13. Сигнал от конечного выключателя 13 запускает блок 20 задержки , который по величине сигнала с датчика 15 длины выдвижения ноги задерживает на некоторое время момент отключения гидроцилиндрд 1 и включения тормозного устройства. Нога все это время продолжает опускаться, а шток вдвигаться в плунжер 6. Необходимая величина времени задержки Т в зависимости от величины вьщвижения ноги может быть определена по формуле
-Vfiv -,
где Н - максимальная длина выдвижения
ноги;
W - ускорение при торможении; Л - величина выдвижения штока.
Через промежуток времени блок 20 задержки выдает разрешающий сигнал устройству 19, которое, управляя гидросистемой транспортного средства, прекращает опускание плунжера 6. Время задержки Гподобрано так, чтобы длина тормозного пути ноги при данной скорости опускания соответствовала выступающей еще из ступни 7 длине штока 10. После остановки плунжера 6 шток 10 полностью утапливается в плунжер 6 и нога опирается на грунт всей ступней 7.
Применение предлагаемого изобрете-. ния позволяет простыми техническими . средствами достичь высокой плавности движения без вертикальных ударов и проседаний корпуса, что обеспечивает высокую комфортабельность и повышенную надежность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм перемещения ноги шагающего движителя | 1973 |
|
SU472053A1 |
| Устройство для управления положением шагающего экипажа | 1977 |
|
SU765094A1 |
| Транспортное средство повышеннойпРОХОдиМОСТи | 1979 |
|
SU844452A1 |
| Шагающее транспортное средство | 1977 |
|
SU686930A1 |
| Шагающий движитель транспортных средств | 1989 |
|
SU1678692A1 |
| Гидропривод шагающего ходового оборудования экскаватора | 1987 |
|
SU1460142A1 |
| Ходовое оборудование шагающего экскаватора | 1987 |
|
SU1467142A1 |
| Механизм перемещения шагающего экскаватора | 1986 |
|
SU1364671A1 |
| НОГА ШАГАЮЩЕГО АППАРАТА | 2014 |
|
RU2594316C2 |
| Шагающий болотный тягач | 2022 |
|
RU2779001C1 |
МЕХАНИЗМ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ СТОПЫ ШАГАКЩЕГО ДВИШТЕЛЯ, содержащий вертикальный гидроцилиндр с опорной пятой, установленной в нижнем конце плунжера цилиндра на подпружиненном штоке, взаимодействуклцем с конечным выключателем, установленным на плунжере, и устройство управления работой гидроцилиндра, отличающийся тем, что, с целью повышения плавности движения и надежности в работе, он снабжен датчиком длины выдвижения плунжера, а в устройство управления введен блок задержки выключения вертикального гидроцилиндра, связанный с конечным выключателем и датчиком длины вы i (Л движения.
LJI
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3135345, кл | |||
| Переносный кухонный очаг | 1919 |
|
SU180A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Механизм перемещения ноги шагающего движителя | 1973 |
|
SU472053A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
