иимают промежуточное положение. В этом промежуточном 1юложении уиор i-i Боздеиствует на датчик i/. датчик i/ дает команду на реиерсианое нереключение электродвигателей 1У и 2U привода виатоБЫх домкраюв, и онн опускаются, а кузов полуьаюна зависает на поворотной оалке .1.
ь нижнем 11фаипем положении упор lo воздействует на датчик 15, который дает команду на остановку электродви1а-1елеи привода винтовых домкратов и -на включение электродвигателя о иривода поворотной оалки.
поворотная оалка с кузовом нолувагона начинает поворачиватвся до тех тор, пока упор U не начнет воздеиствоватв на датчик /. последний дает команду на остановку электродвитателя 6 привода поворотной оалкн и па включение электродвигателей 1У и zU привода винтовых дом1кратов.
ьинтовые домкратв .поднимаются и занимают крайнее осрхнее положение. Ь этом положении упор 10 воздеисгвует на датчик ю, который дает команду на остановку электродвигателей id и zU нривода винтовых домкратов.
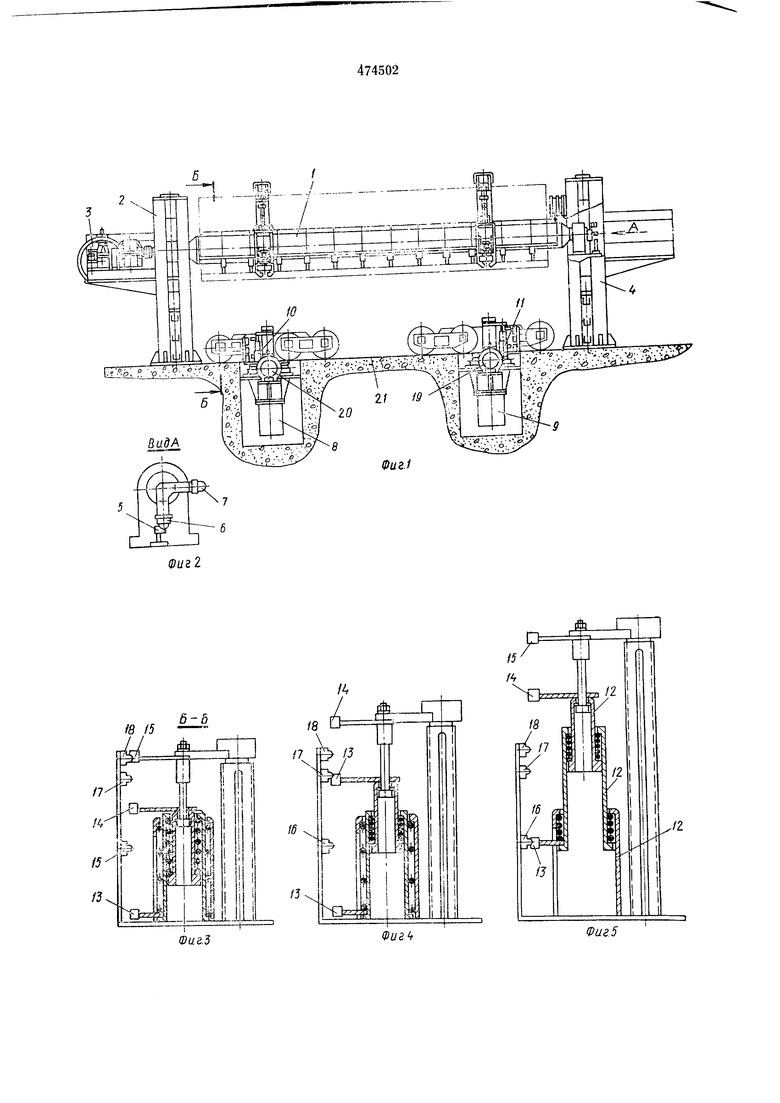
Ъ этом повернутом положении нронсходнт сборка и сварка кузова нолувагона, а винювв;е домкраты фиксируют кузов нолувагопа и поворотную оалку i от возможного поворота нли оорыва. Ъозвращение в исходное положение, т. е. установка после соорки и сварки кузова на тележки, -нроисходит в обратном порядке.
инератор включает электродвигатели 19 и /.О, домкраты опускаются вниз и занимают краинее ннжнее но.южение. ь этол положении упор 10 во.:;деиствует на датчик 1й, который дает команду на остановку электродвигателей 1У и zO привода ВННТОВВ1Х домкратов Ь и У и на Включение электродвигателя 3 привода новоротной балки 1.
Поворотная балка 1 с кузовом полувагона
начинает новорачиватвся до тех пор, пока упор о не начнет воздействовать на датчик о.
датчнк о дает команду на остановку электродвигателя 6 нривода новоротнои оалки 1 и на включение электродви ателеи 2U и 1У привода винтовых до1мкратов.
ьинтовые домкраты поднимаются вверх и занимают промежуточное положение, в котором упор 1 воздействует на датчик 1/, а последний дает команду на реверсивное -переключение электродвигателей ly и ги привода винтовых домкратов. 1Чузов иолуватона расцепляется с поворотной балкой i.
ьинтовые домкраты, опускаясь вместе с кузовом, опускают его на тележки, а сами, опускаясь ниже, занимают крайнее нижнее положение.
ь крайнем нижнем положении упор 15 воздействует на датчик i6, который дает команду на остановку электродвигателей 1У и нривода винтовых домкратов И и 9.
Собранный и сваренный кузов полувагона на тележках по железнодорожному пути iil выкатывают из-лод поворотной балки. На этом цикл соорки и сварки кузова яолувагона заканчивается.
Предмет изобретения
Устройство для монтажа тяжеловесных изделий, например кузовов полувагонов, содержащее смонтированный на стойках кантователь и установленный под ним механизм подъема, выполненный в виде домкратов, отличающееся тем, что, с целью обеспечения автоматической «синхронности работы домкратов и кантователя оно снабжено программным механизмом управления, выполненнв1М в виде закрепленных на секциях домкрата подпружиненных телескопических стоек, снабженных упорами, воздействующими на датчики, управляемые и взаимосвязанные с кантователем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухстоечный кантователь | 1973 |
|
SU438508A1 |
| Кантователь металлоконструкций под сварку | 1984 |
|
SU1234145A1 |
| Устройство для автоматического запирания и отпирания крышек разгрузочных люков полувагонов | 1982 |
|
SU1058817A1 |
| Кантователь металлоконструкций под сварку | 1986 |
|
SU1399046A1 |
| Способ сборки кузовов вагонов с рамами малой жесткости | 2022 |
|
RU2797221C1 |
| ТС-. . .;^ ?-.-.-. ~; - :Ivx:.^ | 1967 |
|
SU190934A1 |
| ВАГОНООПРОКИДЫВАТЕЛЬ | 1967 |
|
SU436002A1 |
| Кантователь металлоконструкций под сварку | 1986 |
|
SU1388248A1 |
| Поточная линия для сборки и сварки полува-гОНОВ | 1979 |
|
SU837689A1 |
| КАНТОВАТЕЛЬ ДЛЯ СБОРКИ И СВАРКИ ИЗДЕЛИЙ | 2004 |
|
RU2281844C2 |