1
Известен электрический двигатель, содержащий развернутый зубчатый магнитопровод с обмотками возбуждения и т-фазной обмоткой управления и зубчатый якорь.
Для улучшения использования активных материалов в предлагаемом двигателе обмотки расположеньГ на спинках магнитопровода с чередованием обмоток возбуждения и управления между собой, шаг зубцов магни2т ± 1
топровода составляет шага зубцов
4/и
якоря, а между зубцами якоря размещены короткозамкнутые обмотки, плоскость намотки которых параллельна рабочему зазору.
Кроме того, в двигатель введены дополнительные магнитопроводы с размещенными на них обмотками, аналогичные основному и расположенные параллельно и перпендикулярно ему, образуя решетку, причем узел пересечения каждого из магнитопроводов образует общий для них зубец.
Такое выполнение двигателя позволяет получить движение на плоскости.
Рещетка, образованная магнитопроводами, может быть как плоской, так и изогнутой по цилиндрической, сферической и тороидальной поверхностям.
На фиг. 1 показана элементарная секция описываемого двигателя в линейном исполнении, общий вид; на фиг. 2 - элемент якоря
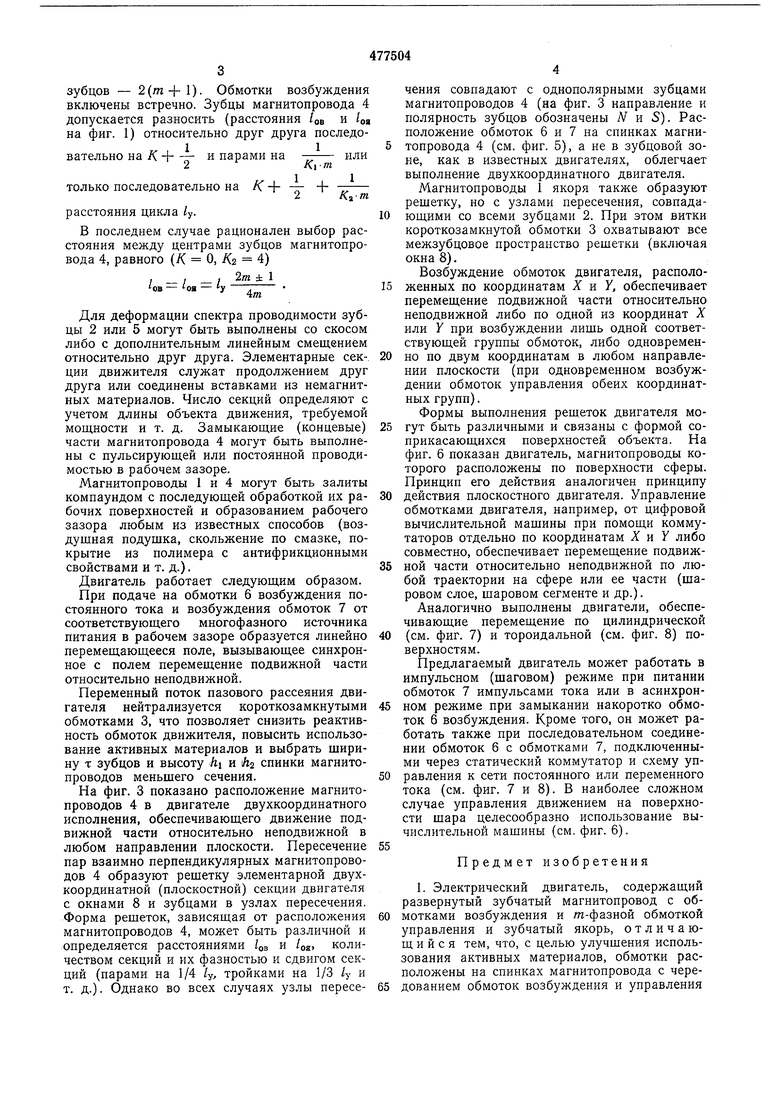
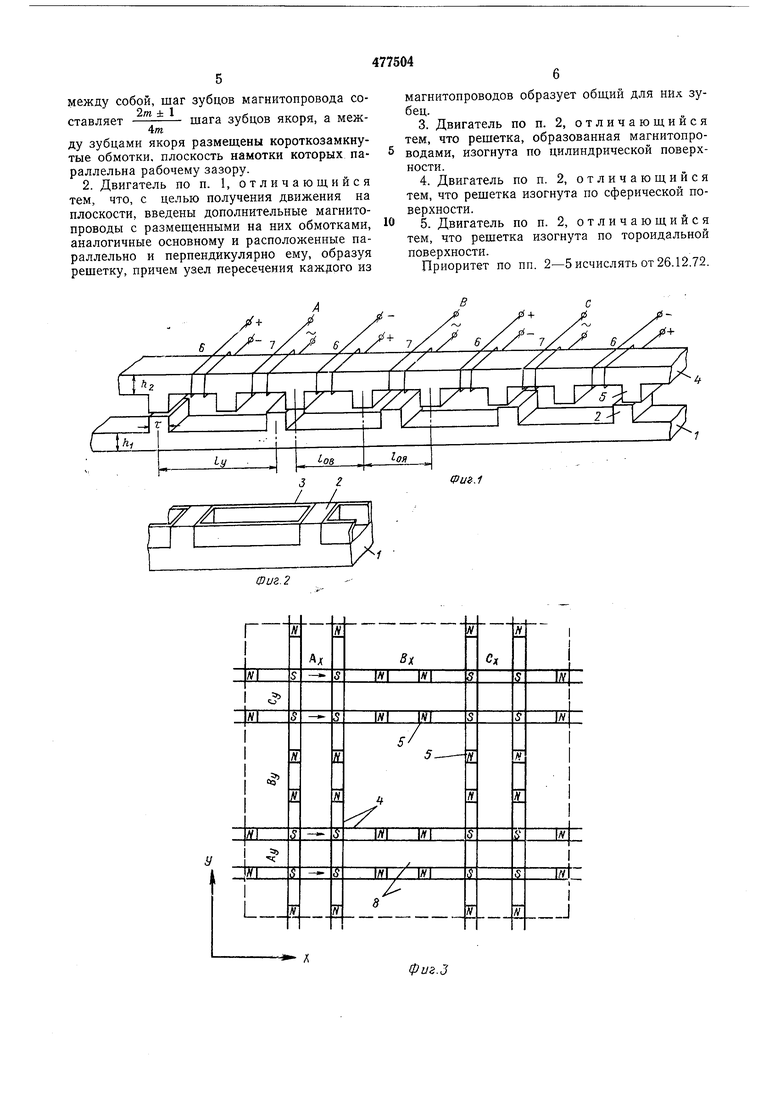
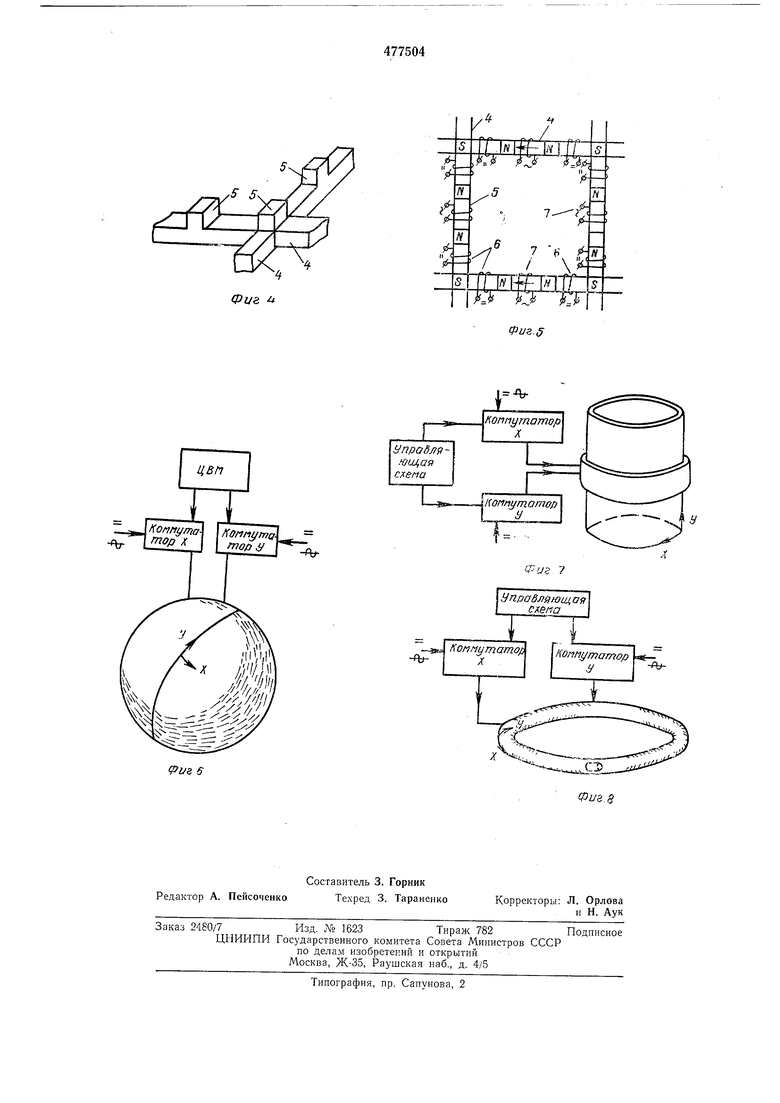
с короткозамкнутой обмоткой, расположенной между зубцами; на фиг. 3 - расположение магнитопроводов, образующих активную решетку элементарной секции двигателя в двухкоординатном исполнении; на фиг. 4 - вариант выполнения узла пересечения магнитопроводов; на фиг. 5 - расположение обмоток в однофазной секции; на фиг. 6-8 - схемы двигателей с решетчатыми магнитопроводами сферической, цилиндрической и тороидальной форм, соответственно.
Реактивная часть (якорь) двигателя (см. фиг. I) содержит развернутый магнитопровод 1 с зубцами 2, между которыми установлены короткозамкнутые обмотки 3 (см. фиг. 2), выполнеииые из прямоугольного провода, фольги или ленты. Витки обмотки 3 замыкаются в процессе намотки точечной сваркой или ииым способом. Расстояние /у между двумя смежными зубцами 2 составляет цикл линейного движения.
Активная часть (движитель) двигателя включает в себя магнитопровод 4 с зубцами 5, на спинках которого расположены обмотки 6 возбуждения и многофазная обмотка 7 управления (на фиг. 1 показана трехфазная секция обмотки управления, содержащая три катушки фаз А, В к С).
Число обмоток возбуждения в элементарной секции двигателя равно m-j- 1, а число зубцов - 2(m+ ) Обмотки возбуждения включены встречно. Зубцы магнитопровода 4 допускается разносить (расстояния /ов и /оя на фиг. 1) относительно друг друга последоь- , 1 1 вательно на л -1 и парами на или 2Ki-m ТОЛЬКО последовательно на /С + -;г + 2/fj /re расстояния цикла /у. В последнем случае рационален выбор расстояния между центрами зубцов магнитопровода 4, равного (К О, К,2 4) / / / оа -- оя - v Для деформации спектра проводимости зубцы 2 или 5 могут быть выполнены со скосом либо с дополнительным линейным смещением относительно друг друга. Элементарные секции движителя служат продолжением друг друга или соединены вставками из немагнитных материалов. Число секций определяют с учетом длины объекта движения, требуемой мощности и т. д. Замыкающие (концевые) части магнитопровода 4 могут быть выполнены с пульсирующей или г остоянной проводимостью в рабочем зазоре. Магнитопроводы 1 и 4 могут быть залиты компаундом с последующей обработкой их рабочих поверхностей и образованием рабочего зазора любым из известных способов (воздущная подущка, скольжение по смазке, покрытие из полимера с антифрикционными свойствами и т. д.). Двигатель работает следующим образом. При подаче на обмотки 6 возбуждения постоянного тока и возбуждения обмоток 7 от соответствующего многофазного источника питания в рабочем зазоре образуется линейно перемещающееся поле, вызывающее синхронное с полем перемещение подвижной части относительно неподвижной. Переменный поток пазового рассеяния двигателя нейтрализуется короткозамкнутыми обмотками 3, что позволяет снизить реактивность обмоток движителя, повысить использование активных материалов и выбрать ширину т зубцов и высоту hi и /12 спинки магнитопроводов меньшего сечения. На фиг. 3 показано расположение магнитопроводов 4 в двигателе двухкоординатного исполнения, обеспечивающего движение подвижной части относительно неподвижной в любом направлении плоскости. Пересечение пар взаимно перпендикулярных магнитопроводов 4 образуют решетку элементарной двухкоординатной (плоскостной) секции двигателя с окнами 8 и зубцами в узлах пересечения. Форма решеток, зависящая от расположения магнитопроводов 4, может быть различной и определяется расстояниями /ов и /оя. количеством секций и их фазностью и сдвигом секций (парами на 1/4 /у, тройками на 1/3 /у и т. д.). Однако во всех случаях узлы пересечения совпадают с однополярными зубцами магнитопроводов 4 (на фиг. 3 направление и полярность зубцов обозначены N к S). Расположение обмоток 6 и 7 на спинках магнитопровода 4 (см. фиг. 5), а не в зубцовой зоне, как в известных двигателях, облегчает выполнение двухкоординатного двигателя. Магнитопроводы 1 якоря также образуют решетку, но с узлами пересечения, совпадающими со всеми зубцами 2. При этом витки короткозамкнутой обмотки 3 охватывают все межзубцовое пространство решетки (включая окна 8). Возбуждение обмоток двигателя, расположенных по координатам X и Y, обеспечивает перемещение подвижной части относительно неподвижной либо по одной из координат X или У при возбуждении лишь одной соответствующей группы обмоток, либо одновременно по двум координатам в любом направлении плоскости (при одновременном возбуждении обмоток управления обеих координатных групп). Формы выполнения решеток двигателя могут быть различными и связаны с формой соприкасающихся поверхностей объекта. На фиг. 6 показан двигатель, Магнитопроводы которого расположены по поверхности сферы. Принцип его действия аналогичен принципу действия плоскостного двигателя. Управление обмотками двигателя, например, от цифровой вычислительной мащины при помощи коммутаторов отдельно по координатам и У либо совместно, обеспечивает перемещение подвижной части относительно неподвижной по любой траектории на сфере или ее части (шаровом слое, шаровом сегменте и др.). Аналогично выполнены двигатели, обеспечивающие перемещение по цилиндрической (см. фиг. 7) и тороидальной (см. фиг. 8) поверхностям. Предлагаемый двигатель может работать в импульсном (шаговом) режиме при питании обмоток 7 импульсами тока или в асинхронном режиме при замыкании накоротко обмоток 6 возбуждения. Кроме того, он может работать также при последовательном соединении обмоток 6 с обмотками 7, подключенными через статический коммутатор и схему управления к сети постоянного или переменного тока (см. фиг. 7 и 8). В наиболее сложном случае управления движением на поверхности щара целесообразно использование вычислительной машины (см. фиг. 6). Предмет изобретения 1. Электрический двигатель, содержащий азвернутый зубчатый магнитопровод с оботками возбуждения и т-фазной обмоткой правления и зубчатый якорь, отличаюийся тем, что, с целью улучшения испольования активных материалов, обмотки расоложены на спинках магнитопровода с череованием обмоток возбуждения и управления
между собой, шаг зубцов магнитопровода со2т ± 1,,
ставляет шага зубцов якоря, а меж4/ге
ду зубцами якоря размещены короткозамкнутые обмотки, плоскость намотки которых параллельна рабочему зазору.
2. Двигатель по п. 1, отличающийся тем, что, с целью получения движения на плоскости, введены дополнительные магнитопроводы с размещенными на них обмотками, аналогичные основному и расположенные параллельно и перпендикулярно ему, образуя решетку, причем узел пересечения каждого из
магнитопроводов образует общий для них зубец.
3.Двигатель по п. 2, отличающийся тем, что решетка, образованная магнитопроводами, изогнута по цилиндрической поверхности.
4.Двигатель по п. 2, отличающийся тем, что решетка изогнута по сферической поверхности.
5.Двигатель по п. 2, отличающийся тем, что решетка изогнута по тороидальной поверхности.
Приоритет по пп. 2-5 исчислять от 26.12.72.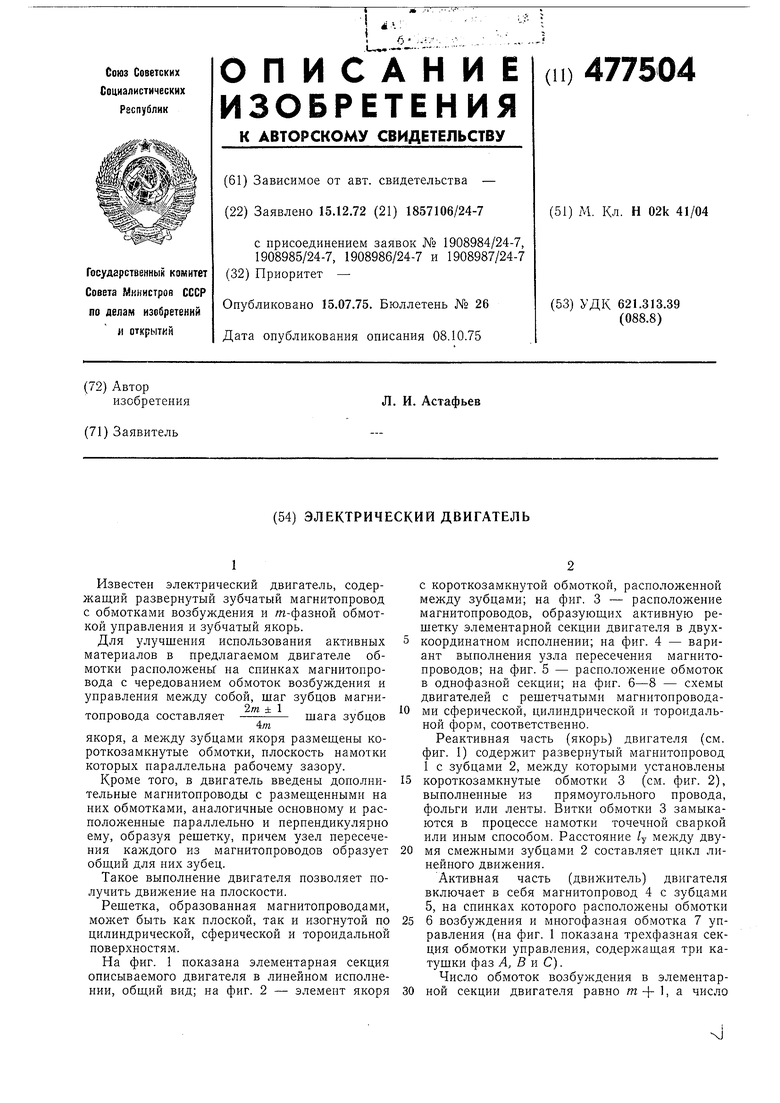
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный электрическийдВигАТЕль | 1979 |
|
SU849389A1 |
| Двухкоординатный шаговый электродвигатель | 1975 |
|
SU577616A1 |
| Двухкоординатный линейный электродвигатель | 1979 |
|
SU942218A1 |
| Двухкоординатный шаговый электродвигатель | 1977 |
|
SU657539A1 |
| Двухкоординатный электродвигатель | 1978 |
|
SU881945A1 |
| Двухкоординатный шаговый электродвигатель | 1987 |
|
SU1422319A1 |
| Двухкоординатный электродвигатель постоянного тока | 1980 |
|
SU1037384A1 |
| Трансформаторный датчик положения ротора вентильного электродвигателя | 1976 |
|
SU688966A1 |
| Репульсионный вентильный электродвигатель | 1977 |
|
SU666619A1 |
| Двухкоординатный электрический двигатель | 1980 |
|
SU972637A1 |
/ //-.
/ /./
// ./
/ /
//
Фиг.1
6
L
иг 7
-%
