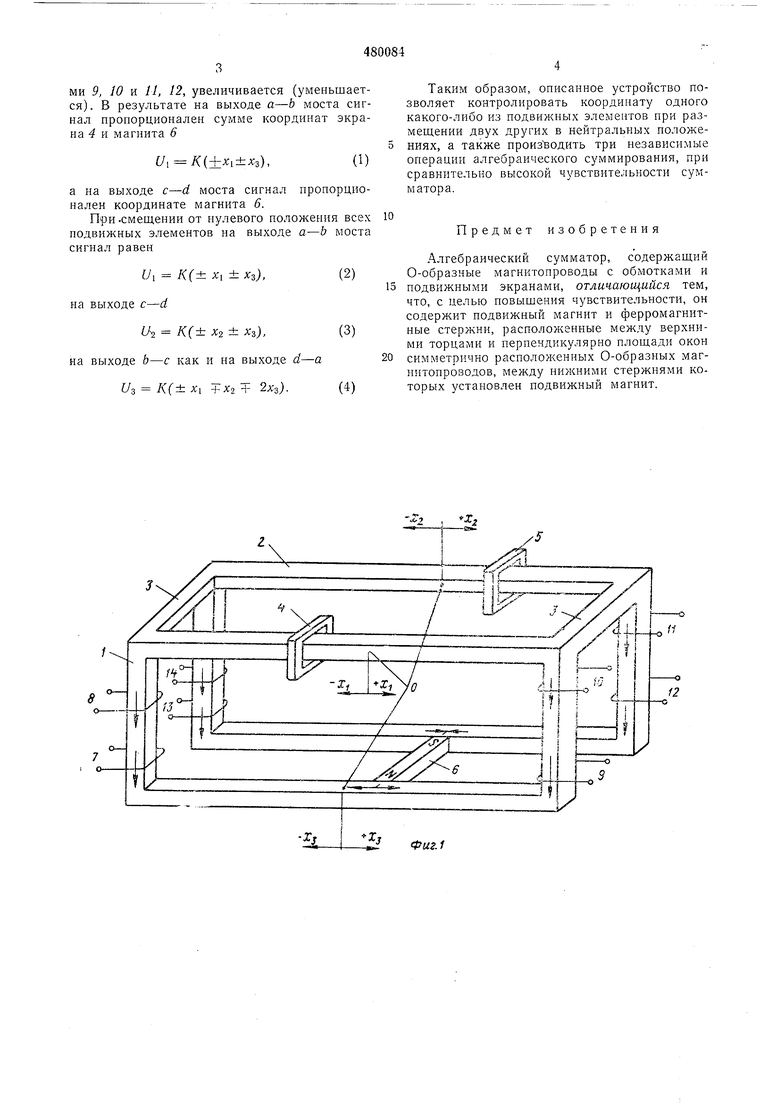
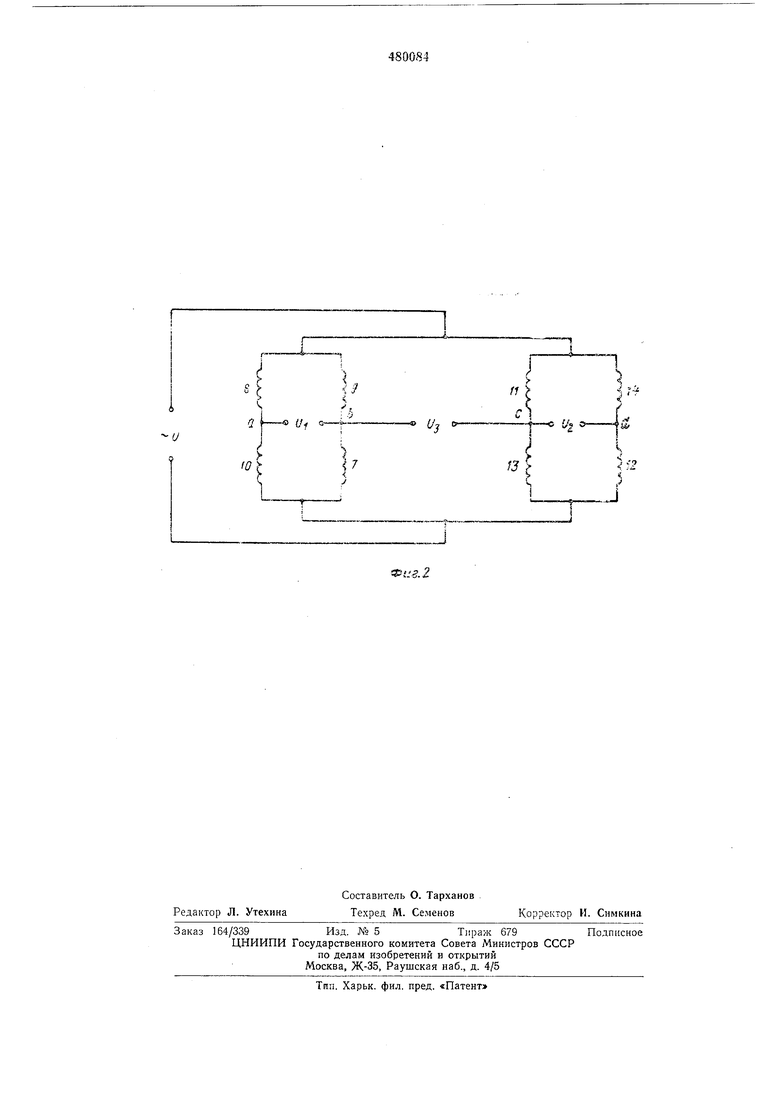
ми 9, 10 и //, 12, увеличивается (уменьшается), в результате на выходе а-Ь моста сигнал пропорционален сумме координат экрана 4 PI магнита 6 Ui K(±Xi±X3), а на выходе c-d моста сигнал пропорционален координате магнита 6. При.смещении от пулевого положения всех подвижных элементов на выходе а-Ь моста сигнал равен Ui К(± XI ± Кг),(2) на выходе с-d и К(± xz ± Хг),(3) на выходе 6-с как и на выходе rf-а f/3 1(± xi +Х2+ 2л-з).(4) Таким образом, описанное устройство позволяет контролировать координату одного какого-либо из подвижных элементов при размещении двух других в нейтральных положениях, а также производить три независимые операции алгебраического суммирования, при сравнительно высокой чувствительности сумматора. Предмет изобретеиия Алгебраический сумматор, содержащий 0-образные магнитопроводы с обмотками и подвижными экранами, отличающийся тем, что, с целью повышения чувствительности, он содержит подвижный магнит и ферромагнитные стержни, расположенные между верхними торцами и перпендикулярно площади окон симметрично расположенных 0-образных магнитопрозодов, между нижними стержнями которых установлен иодвил ный магнит.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь перемещений в код | 1988 |
|
SU1559406A1 |
| Сейсмоприемник | 1979 |
|
SU868671A1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1995 |
|
RU2100779C1 |
| Термокомпенсированный параметрический преобразователь | 1988 |
|
SU1677650A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1997 |
|
RU2113004C1 |
| Бесконтактный сигнализатор положения | 1989 |
|
SU1693360A1 |
| Преобразователь механических сил в широтно-модулированный сигнал | 1988 |
|
SU1624282A1 |
| Измеритель углов ориентации подвижного объекта | 1991 |
|
SU1793228A1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕЙНОГО ОБЪЕКТА | 1973 |
|
SU361456A1 |
| Преобразователь перемещений | 1989 |
|
SU1670362A1 |
/ Фиг. 1
