I
Изобретение относится к системам автоматического регулирсжания и может быть применено для передачи входной скоростной величины, изменяющейся в расширенном (более 100О) диапазоне.
Известен двухдвш-ательный С1 едящий привод, содержащий основную и опорную следящие системы, выходные валы которых соединены между собой через механический дифференциал, элемент сравнения, соединенный через сумматор с входом основной следящей системы, и логическое устройство, первый выход которого подключен к сумматору, второй выход - к входу опорной еле- дящей системы, а первый вход соединен с первым входом элемента сравнения, связанного с выходом механического дифференциала, второй вход логического устройства подключен к тахогенератору, установленному на выходном валу опорной следящей системы, акой привод обладает воз,можностью изменять скорость вращения CBoeio выходного на па в раги иренном диапазоне. Однако устрбйгтва П.11Я точной передачи вхописи
скоростной величины в таком диапазоне неизвестны.
В настоящее время передача скоростных величин производится с помощью тахсн енератора, соединенного непосредственно или через вспомогательную следящую систему с объектом, скорость движения которого надо измерить, Однако тахогенератор имеет О1раниченную зону линейности из-за больщрго уровня щумов на малых скоростях и насыщения мш нитной цепи на больших скоростях.
Цель изобретения - новьниение точности при передаче входной скоростной величины.
Достигается это тем, что предлагаемый двухдвигате.пьный следящий привод содержит два тахогенератора, установленных на выходных валах следящих систем, и выходной сумматор, входы которого соединены с выходами тахогенераторов.
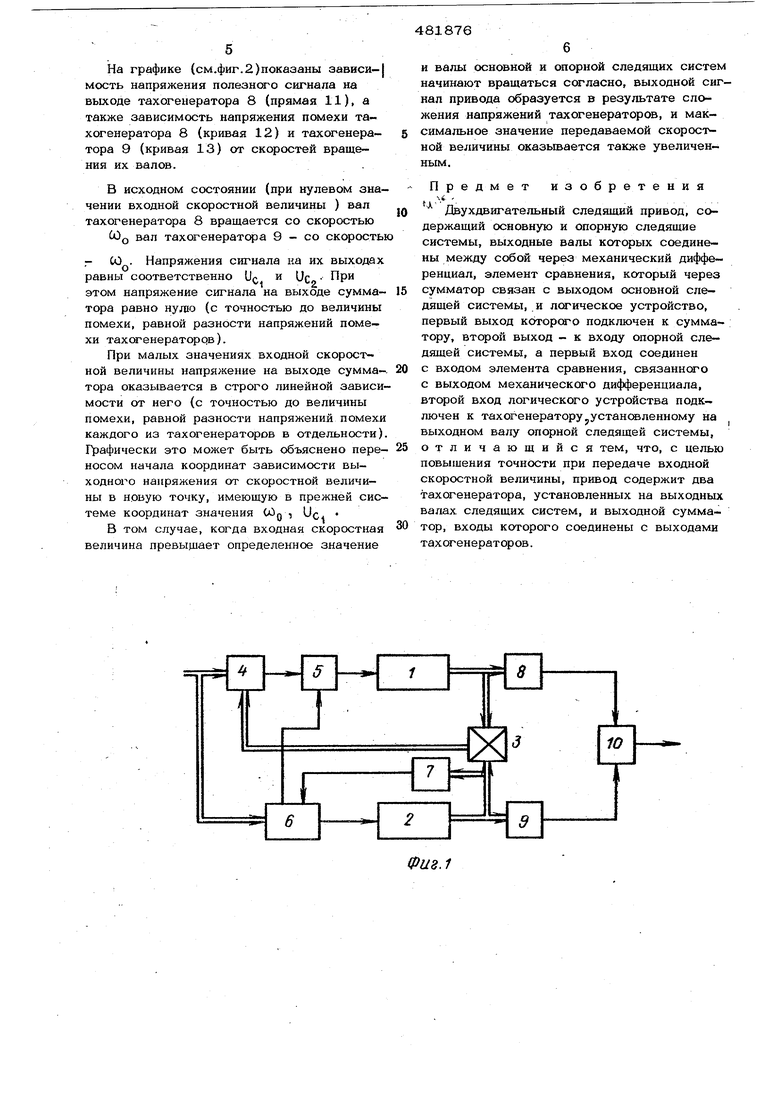
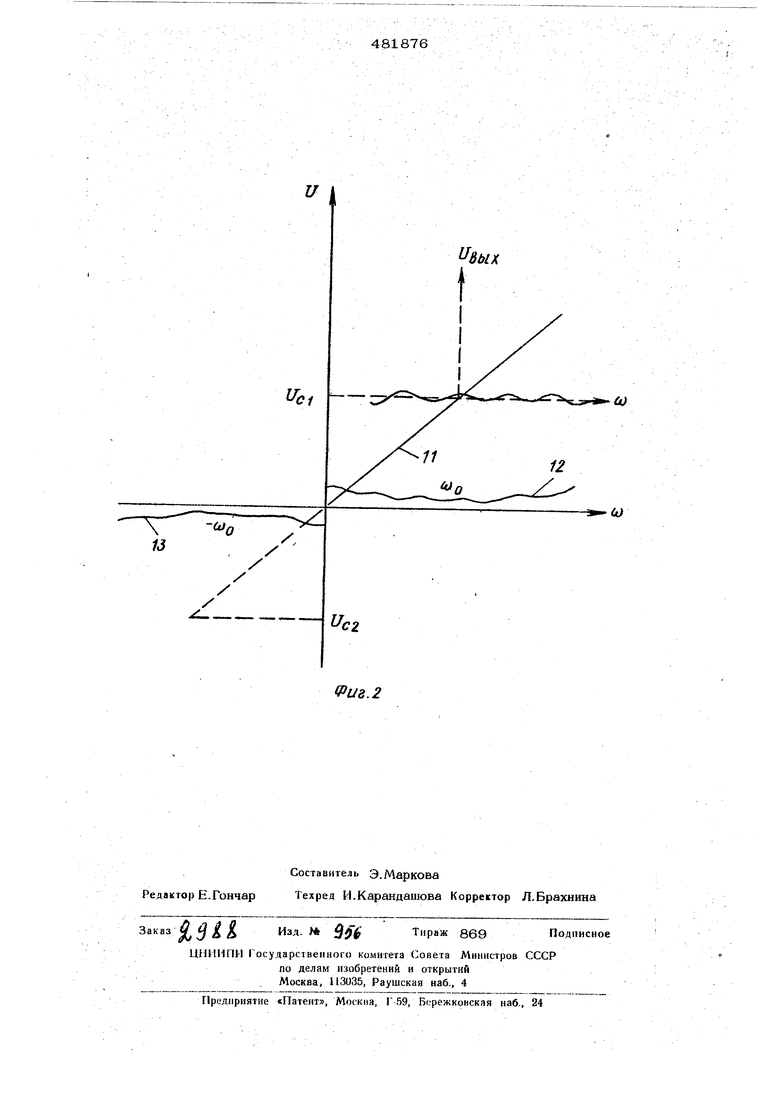
На фиг. 1 представлена структурная схема двухлвигательного следящего приво да; на фиг. 2 - график, поясняющий принцип товышяиля ючтто тт измерения скоро:- ной величины.
Двухдвигательный следящий привод состоит из основной 1 и опорной 2 следящей систем, выходные валы которых соединены через механический дифференциал 3, элемета сравнения 4, выход которого через сумматор 5 соединен с входом основной следящей системы 1, логического устройст ва 6 и тахогенератсра 7, установленного н валу опорной следящей системы 2. Кроме того, в состав привода входят тахогене раторы 8 и 9, установленные на выходных валах основной 1 и опорной 2 следящи систем соответственно и выходной сумматор 10, входы которого соединены с выходами тахогенераторов 8 и 9.
Входом двухдвигательнсго след$пцего привода является первый вход элемента сравнения 4, второй вход которого соединен с выходом механического дифференциала 3.
Логическое устройство 6 служит для изменения установок скорости опорной следящей системы 2 и для управления основной следящей системой 1 при превышен скоростью изменения входной величины определенного значения. Своим первым входом оно соединено с первым входом элемента сравнения 4, вторым входом - с выходом тахогенератора 7, первым выходом - с сумматором 5, а вторым выходом - с входом опорной следящей системы 2.
Тахогеиератор 7 служит для обеспечения перекрестной связи с опорной следящей системы 2 на основную следящую систему 1 при малых скоростях изменения входной величины.
Тахотенераторы 8 и 9 служат для измерения скоростей вращения выходных валов основной 1 и опорной 2 следящих систем и перодачи сигналов об этих скоростях на вхопы сумматора 10, выход которого является выходом привода.
Работа двухдвигатйльного следящего привода при передаче входной скоростной величины происходит следующим образом,
Лвиясеяие выходного вала механического (Гренпиала 3, повторяющее с некоторой точностью все движения, поступающие на вход привода, обеспечивается при малых значениях скорости изменения входной величины за счет разности движений, создаваемых основной 1 и опорной 2 следящими системами. При этом выходной вал опорной следящей системы вращается с постоянной наперед заданной скоростью. Величина этой скорости выбирается примерно равной половине номинальной скорости вращения испо;шительного двигателя опорной слезЯ 1ей системы.
Для того, чтобы при нулевом значении j скорости изменения входной величины выходной вал дифференциала 3 оставался неподвингным, выходной вал основной следящей сибтемы 1 должен вращаться с такой же по велиине и обратнЬТ по знаку скоростью, и выходной вал опорной следящей системы 2. Это обеспечивается введением перекрестной связи с выходу опорной следяще системы на основную с помощью тахот енератора 7 через логическое устройство 6.
При превыщении скорости изменения входной величины определенного значения логическое устройство 6 изменяет в зависимости от этого значения направление или величину скорости вращения выходного вала опорной следящей системы 2, в результате чего ее выходной вал начинает вращаться согласно с выходным валом основной следящей системы 1.
Передача входной скоростной величины в таком приводе происходит следующим образом.
Техогенераторы 8 и .9, установленные на выходных валах основной 1 и опорной 2 следящих систем, генерируют и передают на входы выходного сумматора 1О напряжения, пропорциональные скоростям вращения этих валов.
При этом напряжения на выходах тахогенераторов содержатJкроме полезной составляющей, пропорциональной скорости вращения, составляющую помехи.
При иулевом значении входной скорост- ной величины полезные составляющие на выходах тахогенераторов 8 и 9 равны между собой и противоположны по знаку (фазе). Ввиду того, что напряжения помехи на выходах тахся-енераторов также противопо- ложны по знаку (фазе) и их ъепичмны
примерно равны между собой, то напряжение на выходе сумматора .10 в этом случае равно разности напряжений помехи на выходах тахогенераторов 8 и 9, т.е. напряжение.помехи на выходе сумматора меньше напряжений помехи па выходах каждого из тахогенераторов в отдельности.
При малых значениях входной CKopociной величины величина ;коростп вращения вала тахогенератора 8, установленного на выходном валу основной следящей системы 1, становится больше или меньше величины скорости вращения вала тахогепр ратора 9, оставаясь неизменной по знаку. В результате напряжение на выходе сумматора id пропорционально входной скоростной величине и по-прежнеКГу содержит составляющую помехи, мало отличающуюся от нулевого значетшя. На графике {см.фиг.2)показаны зависи-1 мость напряжения полезного сигнала на выходе тахогенератора 8 (прямая 11), а также зависимость напряжения помехи тахогенератора 8 (кривая 12) и тахогенератора 9 (кривая 13) от скоростей вращения их валов. В исходном состоянии (при нулевом значении входной скоростной величины ) вал тахогенератора 8 вращается со скоростью WQ вал тахогенератсфа 9 - со скорость г СО Напряжения сигнала на их выходах равны соответственно j и Uc При этом напряжение сигнала на выходе сумматора равно нудю (с точностью до величины помехи, равной разности напряжений помехи тахогенераторов). При малых значениях входной скорост ной величины напряжение на выходе сумматора оказывается в строго линейной зависимости от него (с точностью до величины помехи, равной разности напряжений помехи каждого из тахогенераторов в отдельности) Графически это может быть объяснено пере- носом начала координат зависимости выходного напряжения от скоростной величины в новую точку, имеющую в прежней системе координат значения WQ , IJ . В том случае, когда входная скоростная величина превышает определенное значение и валы основной и опорной следящих систем начинают вращаться согласно, выходной сигнал привода образуется в результате сложения напряжений тахогенераторов, и максимальное значение передаваемой скорост ной величины оказывается также увеличенным. Предмет изобретения Двухдвигательный следящий привод, содержащий основную и опорную следящие системы, выходные валы которых соединены между собой через механический дифференциал, элемент сравнения, который через сумматор связан с выходом основной следящей системы, и логическое устройство, первый выход которсхго подключен к сумматору, второй выход - к входу опорной следящей системы, а первый вход соединен с входом элемента сравнения, связанного с выходом механического дифференциала, второй вход логического устройства подключен к тахогенераторууустановленному на выходном валу опорной следящей системы, отличающийся тем, что, с целью повышения точности при передаче входной скоростной величины, привод содержит два тахогенератора, установленных на выходных валах следящих систем, и выходной сумматор, входы которого соединены с выходами тахогенераторов.
8ЫХ
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухканальная следящая система комбинированного регулирования | 1974 |
|
SU498603A1 |
| Следящий привод | 1974 |
|
SU550630A1 |
| Двухканальный электромашинный следящий привод | 1973 |
|
SU492850A1 |
| Двухканальный следящий привод | 1975 |
|
SU572754A1 |
| Следящий привод | 1977 |
|
SU857924A1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| Двухканальный следящий привод | 1973 |
|
SU497558A1 |
| Двухканальный следящий привод | 1975 |
|
SU661498A1 |
| Следящая система | 1975 |
|
SU533908A1 |
| Следящая система | 1979 |
|
SU840798A1 |
/ / /
(Puz.2 -
