штабный блок, йервый и второй дополнительные сумматоры, источник эталонного сигнала и пороговое устройство, причем первый вход блока деления соединен с первым выходом первого датчика скорости, вход которого соединен со вторым входом чувствительного элемента, а второй вход - с выходом первого дополнительного сумматора, первый вход которого соединен с выходом второго датчика скорости, второй вход - с выходом третьего датчика скорости, вход второго датчика скорости соединен с выходом первого двигателя, а вход третьего датчика скорости - с выходом второго двигателя, выход блока деления соединен с входом масштабного блока, выход которого соединен со вторым входом второго дополнительного сумматора, выход которого соединен со вторым входом второго усилителя, а первый вход соединен с выходом источника эталонного сигнала, вход которого через пороговое устройство соединен со вторым выходом первого датчика скорости.
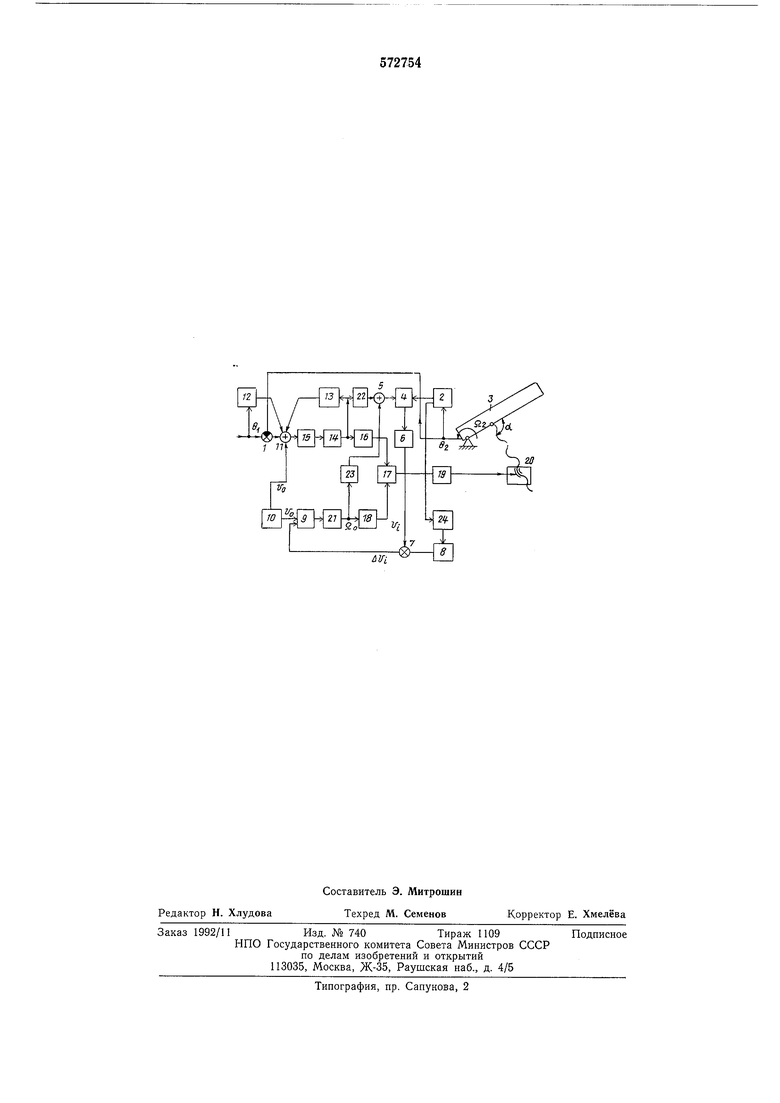
На чертеже представлена блок-схема предлагаемого изобретения, где приняты следующие обозначения:
©1, ©2, 0 - соответственно, входная величина, выходная величина и ошибка следящего привода;
QI, Qg, у, 0 - скорости, соответственно, задаваемая, нагрузки, двигателей управляемого и опорного каналов;
Uo - сигнал с источника опорного сигнала;
«о - угол между осями нагрузки и винта четвертого редуктора;
Ui, Ui3 - сигналы, пропорциональные соответственно текущему и эталонному значению передаточного числа i от двигателя управляемого канала до оси вращения нагрузки;
AUi Uia-Ui - сигнал, пропорциональный отношению текущего значения i от эталонного значения;
tb iz, IR, is, k, la. - передаточные числа, соответственно, первого и второго редукторов, дифференциала, третьего и четвертого редукторов и передачи от винта четвертого редуктора до оси нагрузки.
Предлагаемая схема двухканального следящего привода состоит из чувствительного элемента 1, на первый вход которого поступает входная величина вь а второй вход соединен с входом первого датчика 2 скорости, который соединен также с осью вращения нагрузки 3. Первый выход датчика 2 скорости соединен с первым входом блока 4 деления, второй вход которого соединен с выходом первого дополнительного сумматора 5, а выход - с входом масштабного блока 6. Выход масштабного блока 6 соединен со вторым входом второго дополнительного сумматора 7, первый вход которого соединен с выходом источника 8 эталонного сигнала, а выход - со вторым входом второго усилителя 9, первый вход которого соединен с первым выходом источника 10 опорного сигнала, второй выход которого соединен со вторым входом первого сумматора 11. Первый вход первого сумматора 11 соединён с 1зЫ ходом чувствительного элемента 1, третий вход - с выходом первого тахогенератора 12, четвертый вход - с выходом второго тахогенератора 13. На вход первого тахогенератора 12 поступает входная величина ©i следящего привода, вход второго тахогенератора 13 соединен с выходом первого двигателя 14 управляемого канала. Вход первого двигателя 14
соединен с выходом первого усилителя 15, вход которого соединен с выходом первого сумматора 11, а выход первого двигателя 14 соединен с входом первого редуктора 16, выход которого соединен с первым входом дифференциала 17. Второй вход дифференциала 17 соединен с выходом второго редуктора 18, а выход - с входом третьего редуктора 19, выход которого соединен с входом (гайка) четвертого редуктора 20, выход которого (винт) соединен с нагрузкой 3. Вход второго редуктора 18 соединен с выходом второго двигателя 21, вход которого соединен с выходом второго усилителя 9. Первый вход первого дополнительного сумматора 5 соединен с выходом второго датчика скорости 22, вход которого соединен с выходом первого двигателя 14, а второй вход - с выходом третьего датчика скорости 23, вход которого соединен с выходом второго двигателя 21. Второй выход первого датчика 2
скорости соединен с входом порогового устройства 24, выход которого соединен с входом источника эталонного сигнала 8. Схема работает следующим образом. При отсутствии сигнала ©i первый и второй
двигатели 14 и 21 под действием сигнала f/o вращаются с одинаковыми по величине, но противоположными по знаку скоростями йу, йо- Скорость выходного вала дифференциала 17 равна нулю, нагрузка 3 неподвижна; сигнал
на выходе блока 4 деления равен нулю, так как первый датчик скорости 2 неподвижен, а второй и третий датчики скорости 22, 23 вращаются с постоянными, равными по величине, но противоположными по знаку скоростями.
Сигнал t/ia на выходе источника эталонного сигнала 8 отсутствует, т. к. он с помощью порогового устройства 24 по сигналу с датчика 2 включается лишь при вращении нагрузки 3. Дополнительный сигнал с выхода второго
дополнительного сумматора 7 на вход второго усилителя 9 опорного канала не вводится.
При наличии сигнала ©i на входе привода скорость йу первого двигателя 14 будет отличаться по величине от скорости QO второго
двигателя 21. Скорость выходного вала дифференциала 17 теперь не равна нулю и нагрузка 3 перемещается со скоростью Qa, определяемой значением задаваемой скорости Qi d©i/ Idt. Даже при постоянной скорости QI для
обеспечения постоянной скорости йа нагрузки 3 скорость Qy первого двигателя 14 не будет постоянной, т. к. передаточое число передачи от первого двигателя 14 до оси вращения нагрузки 3 непостоянное из-за изменения угла ее
и второстепенных факторов, вызванных погрешностями уже самих первого, второго, третьего и четвертого редукторов 16, 18, 19, 20 и дифференциала 17. Если учесть принятые обозначения неред аточных чисел элементов привода, то Q2 fio4ij -iz-k-1-j. - QyiiJysUtc. следовательно, суммарное нередаточное число от первого двигателя 14 до оси вращения нагрузки 3 выражается . Qo-/2-/a-/3- 4- - 2 г,, - i дЬ 4ct-Q. Если положить, что il l2, то /1 /д гз /4 /а «2 гд гз 4 с. а следовательно, 1-Qy/Qo Из последнего выражения видно, что, изменяя QO при переменном г , можно обеспечить постоянное значение Qy при постоянных значениях QI и Q2. Измерив текущее значение U с помощью первого, второго и третьего датчиков скорости 2, 22, 23 и блока деления 4 и сравнив его с эталонным значением, задаваемым источником эталонного сигнала 8, на выходе второго дополнительного сумматора 7 формируется сигнал коррекции Af/, обеснечивающей коррекцию нередаточного числа is. Применение предлагаемого изобретения позволит повысить точность работы двухканального следящего привода введением сравнительно простых устройств. Формула изобретения Двухканальный следящий привод, содержащий последовательно соединенные первый усилитель, первый двигатель и нервый редуктор, выход которого соединен с первым входом дифференциала, и последовательно соединенные источник опорного сигнала, второй усилитель, второй двигатель, второй редуктор, выход которого соединен со вторым входом дифференциала, выход которого через третий редуктор соединен с четвертым редуктором, выход которого соединен с нагрузкой, кинематически связанной сО вторым входом чувствительного элемента, первый вход которого соединен с входом следящего привода, а выход соединен с первым входом первого сумматора, второй вход которого соединен со вторым выходом источника опорного сигнала, третий вход - с выходом первого тахогенератора, вход которого соединен с входом следящего привода, четвертый вход - с выходом второго тахогенератора, вход которого соединен с выходом первого двигателя, а выход первого сумматора соединен с входом первого усилителя, отличающийся тем, что, с целью повышения точности и нлавности работы двухканального следящего привода, в него введены три датчика скорости, блок деления, масщтабный блок, первый и второй дополнительные сумматоры, источник эталонного сигнала и пороговое устройство, причем первый вход блока деления соединен с первым выходом первого датчика скорости, вход которого соединен со вторым входом чувствительного элемента, а второй вход - с выходом первого дополнительного сумматора, первый вход которого соединен с выходом второго датчика скорости, второй вход - с выходом третьего датчика скорости, вход второго датчика скорости соединен с выходом первого двигателя, а вход третьего датчика скорости - с выходом второго двигателя, выход блока деления соединен с входом масштабного блока, выход которого соединен со вторым входом второго дополнительного сумматора, выход которого соединен со вторым входом второго усилителя, а первый вход соединен с выходом источника эталонного сигнала, вход которого через пороговое устройство соединен со вторым выходом первого датчика скорости. Источники информации, принятые во внимание при экспертизе 1.Патент США °. 3358201, кл. 318-18, опубл. 1967. 2.Марголин М. М., Медников Л. А. «Динамика двухканального электропривода с механическим дифференциалом при работе на упор. Электричество, № 5, 1961. 3.Авторское свидетельство СССР ЛЬ 322761, М. Кл. G05B 11/00, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1974 |
|
SU550630A1 |
| Двухканальный следящий привод | 1975 |
|
SU549781A1 |
| Двухканальный следящий привод | 1975 |
|
SU661498A1 |
| Следящий привод | 1977 |
|
SU857924A1 |
| Двухканальная следящая система комбинированного регулирования | 1974 |
|
SU498603A1 |
| Следящая система | 1975 |
|
SU533908A1 |
| Двухканальный следящий привод | 1973 |
|
SU497558A1 |
| Двухканальный электромашинный следящий привод | 1973 |
|
SU492850A1 |
| Следящий привод | 1974 |
|
SU641393A1 |
| Двухдвигательный следящий привод | 1975 |
|
SU742867A1 |