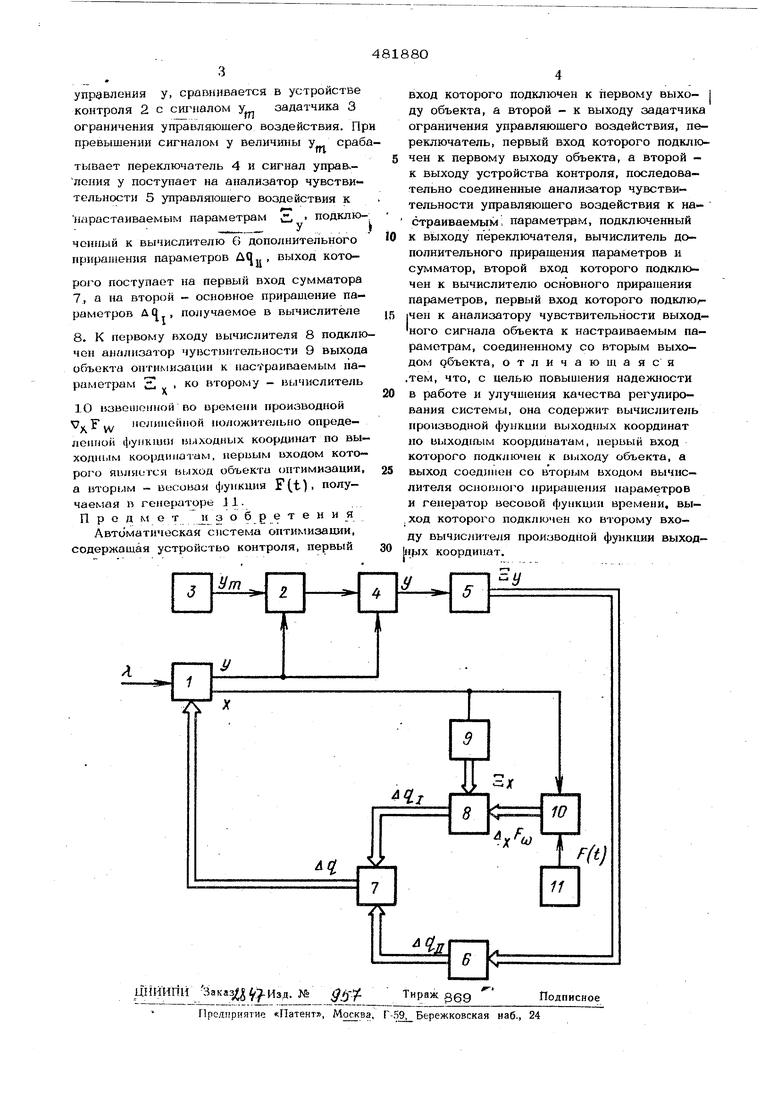
(54) АВТОМАТИЧЕСКАЯ СИСТЕМА ОПТИМИЗАЦИИ у, сравнивается в устройстве управления с сш налом у оадатчика 3 контроля 2 ограничения управляющего воздействия. Пр превь шении сигналом у величины у сраб тывает переключатель 4 и сигнал управ,лопия у поступает на анализатор чувствительности 5 управляющего воздействия к парастаиваемым параметрам подключенный к вычислителю 6 дополнительного приращения параметров . выход которого поступает на первый вход сумматора 7,а на второй - основное приращение параметров uQj, получаемое в вычислителе 8.К первому входу вычислителя 8 подклю чен анализатор чувствительности 9 выхода объекта оптимизации к настраиваемым параметрам S „ . ко второму - вычислитель Ю взвошсмпюй во времени производной V F 1л/ нелинейной ноложительно определенной функции выходных координат по выходным коордшштам, первым входом которого явлиигся выход объекта (оптимизации, а вторым - висован функция F(t). получаемая в генераторе J1. П р о д м о т J 3 о б g е т е и и я Автоматическая система оптимизации, содержащая устройство контроля, первый вход которого подключен к первому выхо- j ду объекта, а второй - к выходу задатчика ограничения управляющего воздействия, переключатель, первый вход которого подключей к первому выходу объекта, а второй к выходу устройства контроля, последовательно соединенные анализатор чувствительности управляющего воздействия к настраиваемым, параметрам, подключенный к выходу переключателя, вычислитель дополнительного приращения параметров и сумматор, второй вход которого подключен к вычислителю основного приращения параметров, первый вход которого подклюг|чен к анализатору чувствительности выходного сигнала объекта к настраиваемым параметрам, соеди} енному со вторым выходом объекта, отличающаяся .тем, что, с целью повышения надежности в работе и улучшения качества регулирования системы, она содержит вычислитель 1гроизводной функции выходных координат но выходным координатам, первый вход которого подключен к выходу объекта, а выход соединен со вторым входом вычислителя основного приращения параметров и генератор весовой функции времени, вы- ход которого подключен ко второму входу вьrчиcJlИтeJiя производной функции выходfjix координат.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая система оптимизации | 1974 |
|
SU485412A1 |
| Система автоматического регулирования | 1972 |
|
SU442459A1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР НАПРЯЖЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 2011 |
|
RU2465717C1 |
| Устройство для определения оптимальных траекторий | 1983 |
|
SU1223240A1 |
| Автоматический оптимизатор группы объектов | 1973 |
|
SU462166A2 |
| Система идентификации параметров многомерного нелинейного динамического объекта | 1986 |
|
SU1385122A1 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
| УСТРОЙСТВО для АНАЛИЗА ИЗОБРАЖЕНИЙ | 1970 |
|
SU277413A1 |
| Устройство для определения параметров динамического звена | 1983 |
|
SU1160372A1 |
| СПОСОБ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2658538C2 |
