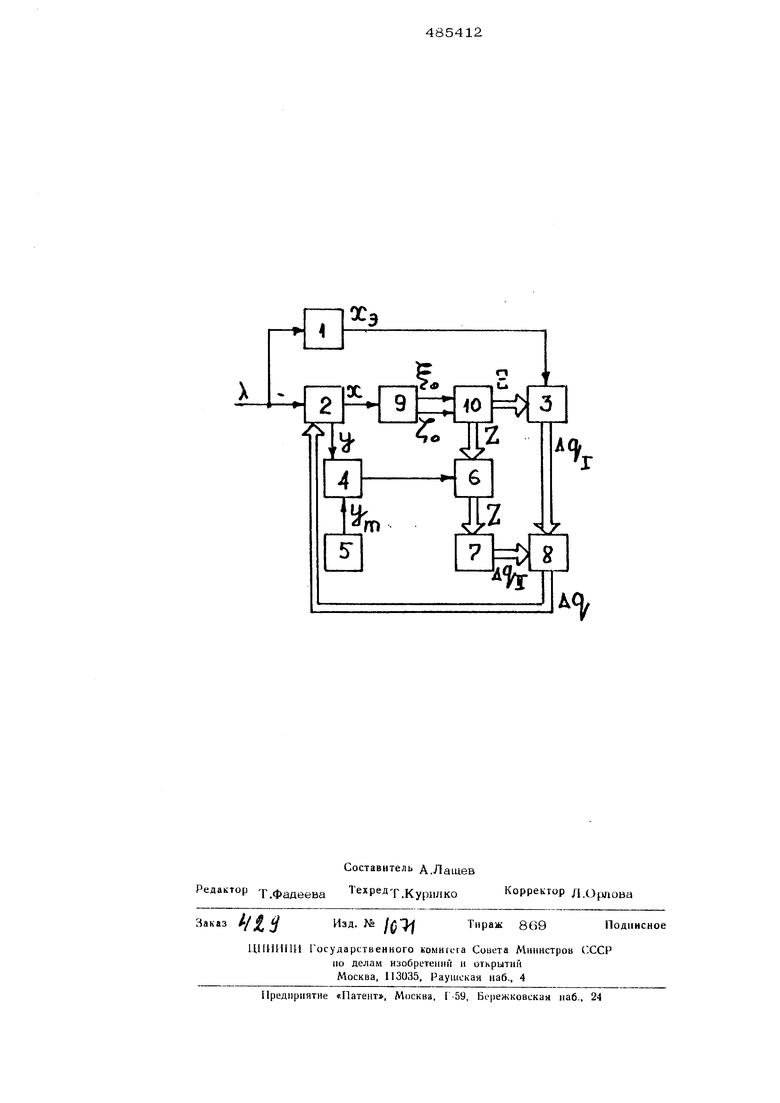
Связь между функциями чувствительности будет иметь вид i(t) DU); иО (t) (j.-ju,...,0,.,.,l ), где J -индекс настраиваемого параметра регулятора; и 0 Ь - сигналы чувствительности выхода объе та и управляющего воздействия к пропорциональной составляющей регулятора, получаемые в однопараметрическом анализаторе чувствительности, а фильтр составляется иа операторов ),...D,.. D В результате на его выходе будут получеЕгы все сигналы чувствительности: На чертеже дана функциональная схема предлагаемой системы, Она содержит эталонную модель 1, объек 2, выпюлитель 3 основного приращения па раметров, устройство контроля 4, задатчик 5 ограничения управляющего воздействия, переключатель 6, вычислитель 7 дополнигольного приращения параметров, сумматор и, однопараметрический анализатор чувстви (ч;льности 9 и фильтр 10. (истома работает следующим образом. Выходной сигнал , поступает на эталон иую модель 1, выходом которой является .,Лмем1лй переходный процесс Л, и на пе 11J U вход объекта 2. Первый выход X ог)ъе 1.1 1и)д,ле1-ся на одмопараметрическнй апали:i.,rop чувств()тельности 9, первый и второй ы..1.чодьг KOTOpoiO, snwHHOLiuiGCH сигналами ...лы1ости о иь1хода объект и иравляюшого воздействия к прогюрдионал н,.и гос1-авляю1 1ей ре1 улято()а, нод1«Ш1чень i.-oi.j-hijTCTBeifHO к первому и второму входам фильтра 10, первый и второй выходы которо- го представляют собой соответственно сигналы чувствительности выхода объекта и Z управляющего воздействия по всем настраиваемым параметрам регулятора. Первый выход фильтра 10 подключен к первому входу вычислителя 3 основного приращения параметров Q , , на второй вход которого подается выход эталонной модели. Второй выход фильтра через переключатель 6 подключен к вычислителю 7 дополнительного приращения параметров Д д . Выходы вычислителей 3 и 7 подключены к сумматору G, выход которого подключен ко второму входу объекта. Переключатель 6 включается устройством контроля 4 при превышении сигналом управления , поступающим на его первый вход, величины У„, , поступающей на второй вход от задатчика ограничения управления 5. Предмет изобретения Автоматическая система оптимизации, содержащая эталонную модель, вход которой ггодключан к первому входу объекта, устройство контроля, первый вход которого подключен ко второму выходу объекта, а второй к выходу задатчика ограничения управляющего воздействия, переключатель, второй вход которого подключен к выходу устройства контроля, последовательно соединенные вычислитель основного приращения параметров, второй вход которого подк шэчен к выходу эталонной модели, и сумматор, подключенный ко второму входу объекта, второй вход которого соединен с вычислителем дополнительного приращения параметров, подключенным к выходу переключателя, о т л и ч а ю щ а я с я тем, что, с целью повышения надежности работы, она содержит однопараметрический анализатор чувствительности, подключенный к по)кюму выходу объекта, и фильтр, подкл ючен |Ы11 к первому и второму выходам одно1и)1)аметрическогю анализатора чув- стви1-ельности, порыли выход которого подключен к первому входу вычислителя основногО нри 1ащен11я н;|рамет1)ов, а второй- к первому входу нереключателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического регулирования | 1972 |
|
SU442459A1 |
| Автоматическая система оптимизации | 1974 |
|
SU481880A1 |
| Адаптивная двухцелевая система управления | 1982 |
|
SU1100608A1 |
| Способ и устройство повышения точности управления углом установки лопастей поворотно-лопастной турбины | 2015 |
|
RU2608793C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2571693C1 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| СИСТЕМА СВЯЗИ УПРАВЛЕНИЯ УДАЛЁННЫМИ ОБЪЕКТАМИ | 2015 |
|
RU2666105C1 |