(54) ПОДЪЕМНЫЙ МЕХАНИЗМ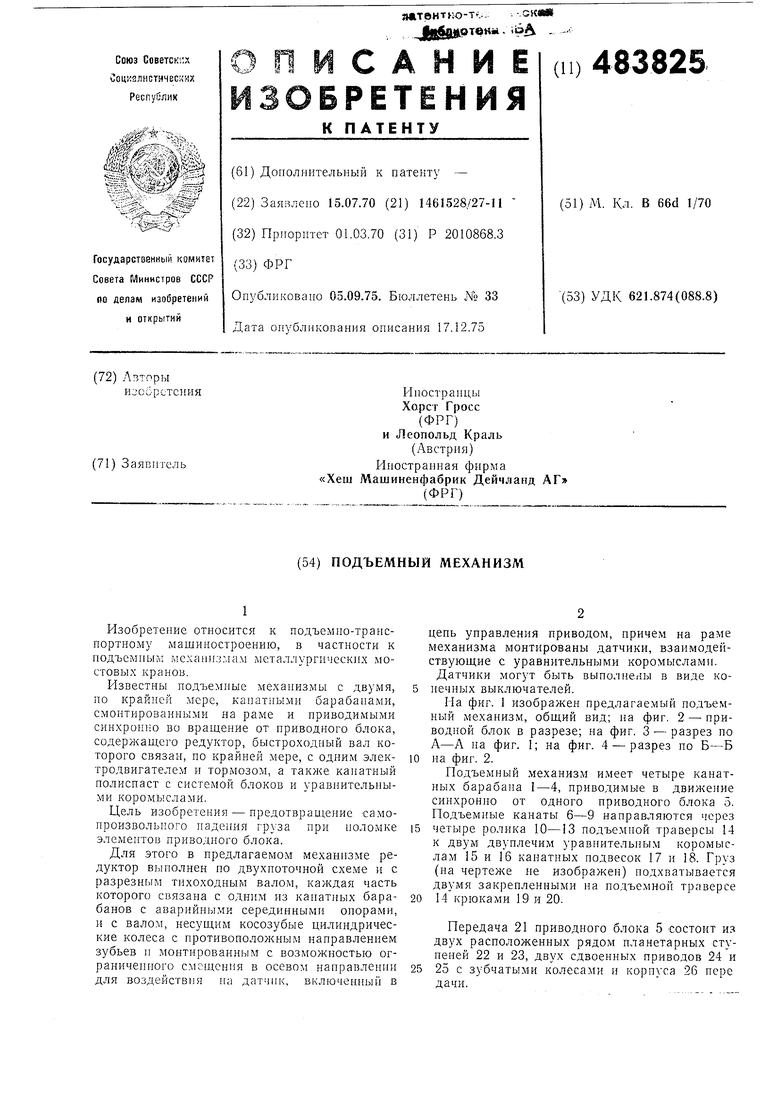
1
Изобретение относится к подъемно-транспортному машиностроению, в частности к нодъемным л еханнзма.м металлургических мостовых кранов.
Известны подъемные механизмы с двумя, но крайней мере, канатными барабаиами, смоитироваиными на раме и приводимыми синхронно во вращение от нриводного блока, содержащего редуктор, быстроходный вал которого связан, но крайней мере, с одним электродвигателем н тормозом, а также канатный полиспаст с системой блоков и уравнительными коромыслами.
Цель изобретения - предотвращение самопроизвольного падения груза при поломке элементов приводного блока.
Для этого в предлагаемом механизме редуктор вынолнен но двухпоточной схеме и с разрезным тихоходным валом, каждая часть которого связана с одним из канатных барабанов с аварнйны.ми серединными опорами, и с валом, несущим косозубые цилиндрические колеса с противоположным направлением зубьев II монтированным с возможностью ограниченного смещения в осевом направлении для воздействия на датчик, включеиньи в
цеиь управления приводом, причем на раме механизма монтированы датчики, взаимодействующие с уравнительными коромыслами. Датчики могут быть выполнены в виде коиечных выключателей.
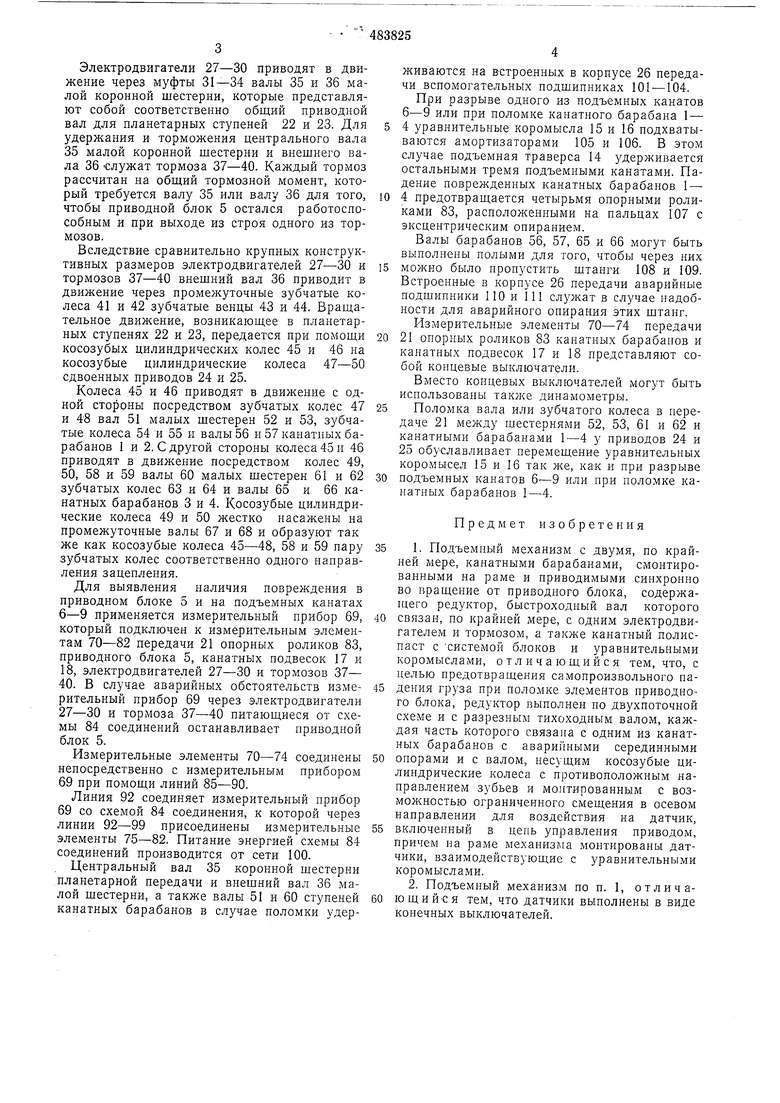
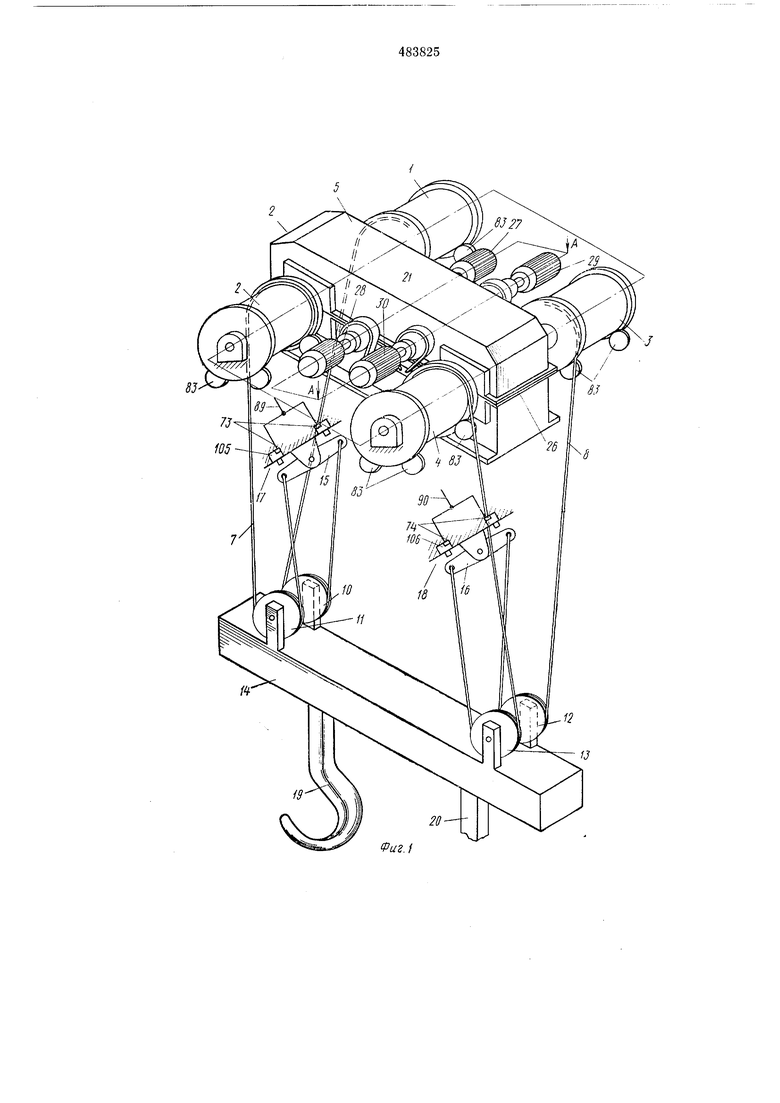
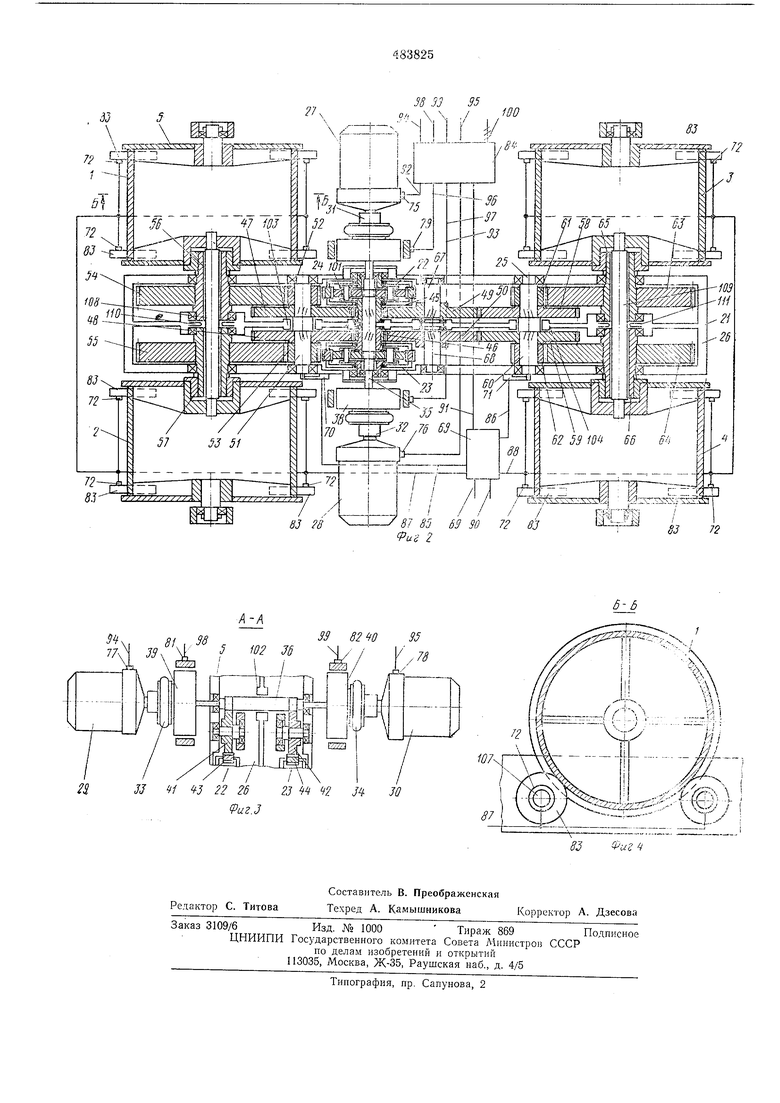
На фиг. 1 изображен предлагаемый подъемный механизм, общий вид; на фиг. 2 - приводной блок в разрезе; на фиг. 3 - разрез по А-А на фиг. 1; иа фиг. 4 - разрез по Б-Б
па фиг. 2.
Подъемный механизм имеет четыре канатных барабана 1-4, приводимые в движение синхронно от одного приводного блока 5. Подъемпые канаты 6-9 направляются через
четыре ролика 10-13 подъемной траверсы 14 к двум двуплечим уравнительным коромыслам 15 и 16 канатных подвесок 17 и 18. Груз (иа чертеже ие изображен) подхватывается двумя закрепленными на подъемной траверсе
14 крюками 19 и 20.
Передача 21 приводного блока 5 состоит из двух расположеиных рядом планетарных ступеней 22 и 23, двух сдвоенных приводов 24 и 25 с зубчатыми колесами н корпуса 26 пере дачи.
Электродвигатели 27-30 приводят в движение через муфты 31-34 валы 35 и 36 малой коронной шестерни, которые представляют собой соответственно общий приводной вал для планетарных ступеней 22 и 23. Для удержания и торможения центрального вала 35 малой коронной шестерни к внешнего вала 36 служат тормоза 37-40. Каждый тормоз рассчитан на общий тормозной момент, который требуется валу 35 или валу 36 для того, чтобы приводной блок 5 остался работоспособным и при выходе из строя одного из тормозов.
Вследствие сравнительно крупных конструктивных размеров электродвигателей 27-30 и тормозов 37-40 внешний вал 36 приводит в движение через промежуточные зубчатые колеса 41 и 42 зубчатые венцы 43 и 44. Вращательное движение, возникающее в планетарных ступенях 22 и 23, передается при помощи косозубых цилиндрических колес 45 и 46 на косозубые цилиндрические колеса 47-50 сдвоенных приводов 24 и 25.
Колеса 45 и 46 приводят в движение с одной стороны посредством зубчатых колес 47 и 48 вал 51 малых шестерен 52 и 53, зубчатые колеса 54 и 55 и валы 56 и 57 канатных барабанов 1 и 2. С другой стороны колеса 45 и 46 приводят в движение посредством колес 49, 50, 58 и 59 валы 60 малых шестерен 61 и 62 зубчатых колес 63 и 64 и валы 65 и 66 канатных барабанов 3 и 4. Косозубые цилиндрические колеса 49 и 50 жестко насажены на промежуточные валы 67 и 68 и образуют так же как косозубые колеса 45-48, 58 и 59 пару зубчатых колес соответственно одного направления зацепления.
Для выявления наличия повреждения в приводном блоке 5 и на подъемных канатах 6-9 применяется измерительный прибор 69, который подключен к измерительным элементам 70-82 передачи 21 опорных роликов 83, приводного блока 5, канатных подвесок 17 и 18, электродвигателей 27-30 и тормозов 37- 40. В случае аварийных обстоятельств измерительный прибор 69 через электродвигатели 27-30 и тормоза 37-40 питающиеся от схемы 84 соединений останавливает приводной блок 5.
Измерительные элементы 70-74 соединены непосредственно с измерительным прибором 69 при помощи линий 85-90.
Линия 92 соединяет измерительный прибор 69 со схемой 84 соединения, к которой через линии 92-99 присоединены измерительные элементы 75-82. Питание энергией схемы 84 соединений производится от сети 100.
Центральный вал 35 коронной шестерни планетарной передачи и внешний вал 36 малой шестерни, а также валы 51 и 60 ступеней канатных барабанов в случае поломки удерживаются на встроенных в корпусе 26 передачи вспомогательных подшипниках 101 -104.
При разрыве одного из подъемных канатов 6-9 или при поломке канатного барабана 1 - 4 уравнительные коромысла 15 и 16 подхватываются амортизаторами 105 и 106. В этом случае подъемная траверса 14 удерживается остальными тремя подъемными канатами. Падение поврежденных канатных барабанов 1 -
4 предотвращается четырьмя опорными роликами 83, расположенными на пальцах 107 с эксцентрическим опиранием.
Валы барабанов 56, 57, 65 и 66 могут быть выполнены полыми для того, чтобы через них
можно было пропустить щтанги 108 и 109. Встроенные в корпусе 26 передачи аварийные подщипники 110 и 111 служат в случае надобности для аварийного опирания этих щтанг. Измерительные элементы 70-74 передачи
21 опорных роликов 83 канатных барабанов и канатных подвесок 17 и 18 представляют собой концевые выключатели.
Вместо концевых выключателей могут быть использованы также динамометры.
Поломка вала или зубчатого колеса в передаче 21 между шестернями 52, 53, 61 и 62 и канатными барабанами 1-4 у приводов 24 и 25 обуславливает перемещение уравнительных коромысел 15 и 16 так же, как и при разрыве
подъемных канатов 6-9 или при поломке канатных барабанов 1-4.
Предмет изобретения
связан, по крайней мере, с одним электродвигателем и тормозом, а также канатный полиспаст с системой блоков и уравнительными коромыслами, отличающийся тем, что, с целью предотвращения самопроизвольного падения груза при поломке элементов приводного блока, редуктор выполнен по двухпоточной схеме и с разрезным тихоходным валом, каждая часть которого связана с одним из канатных барабанов с аварийными серединными
опорами и с валом, несущим косозубые цилиндрические колеса с противоположным направлением зубьев и монтированным с возможностью ограниченного смещения в осевом направлении для воздействия на датчик,
включенный в цепь управления приводом, причем на раме механизлга монтированы датчики, взаимодействующие с уравнительными коромыслами. 2. Подъемный механизм по п. 1, отличающийСЯ тем, что датчики выполнены в виде конечных выключателей.
Vus.i dJ5 --j- :з i I ,, j 28 S 33 35 on I ,OD I 1 r J ,2 i 1к -.З. A Й;Г Г 2Й:§±Й1 p-,,--.-,--- --ir-.-;v.; / / .i - 83
