мы - расстояние между осями
вращения балансиров, на которые установлены датчи.кн ходов катков и длнна балансира соответственно.
Интегратор 8 вынолнен но схеме катодного новторения с интегрирующей емкостью, причем заряд-разряд .наконителя нроизводится имнульсами определенной длительности и амнлитуды. Частота следования имнульсов формируется датчиком 9 пройденного нути в зависимости от скорости перемещения платформы 1 по грунтовой дороге.
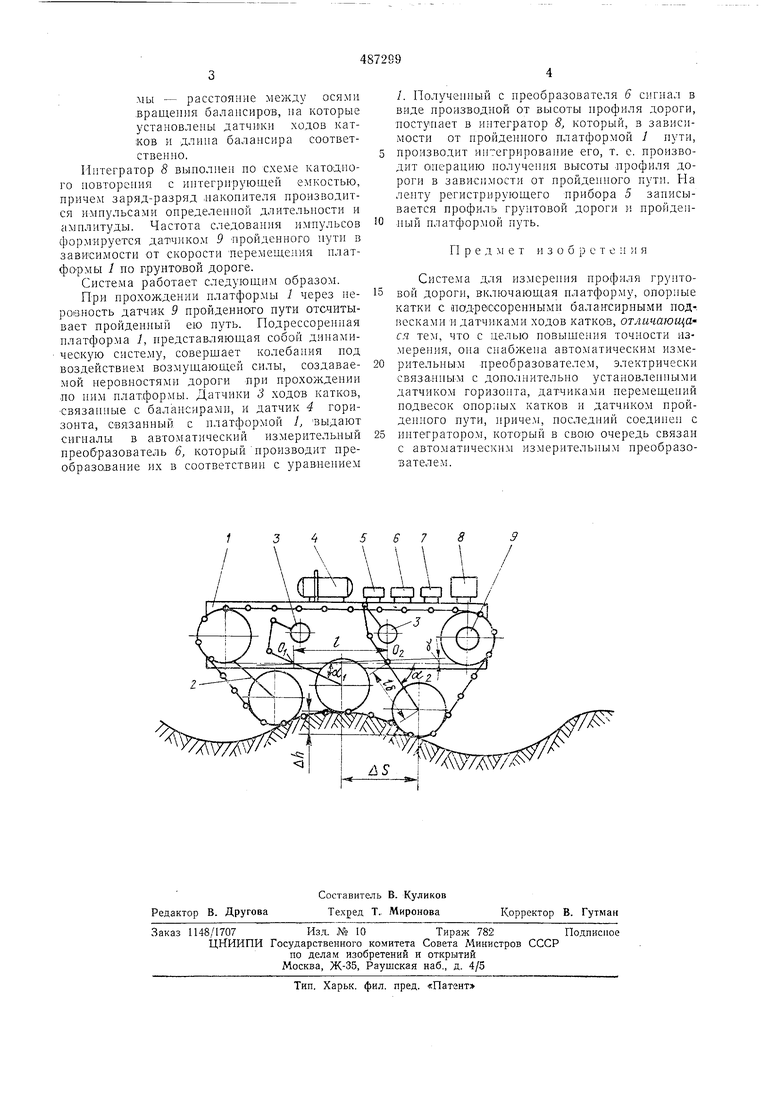
Система работает следующим образом. Прн прохождении платфор.чы / через перовность датчвк 9 пройденного пути отсчитывает пройденный ею путь. Подрессоренная платформа 1, представляющая собой динамическую систему, соверщает колебания под воздействием возмущающей силы, создаваемой неровностями дороги при прохождении ло ним нлатформы. Датчики 3 ходов катков, связанные с балансирами, и датчик 4 горизонта, связанный с нлатформой 1, выдают сигналы в автоматический измерительный преобразователь 6, который производит преобразование их в соответствии с уравнением
/. Полученный с преобразователя 6 сигнал в виде производной от высоты профиля дороги, поступает в интегратор 8, который, в завис мости от пройденного платформой 1 пути, производит интегрирование его, т. е. производит 01нерацию нолучения вьгсоты лрофиля дороги в зависимости от пройденного пути. Па ленту регистрирующего нрнбора 5 записывается профиль грунтовой дороги и пройдеипый платформой путь.
Предмет изобретен } я
Система для нзмереиия профиля грунтовой дороги, включающая платформу, опорные катки с аюдрессоренными балаксирными подвескамн н датчиками ходов катков, отличающа ся тем, что с целью иовыщения точности измерения, она снабжена автоматически.м измерительным преобразователем, электрически связанным с дополнительно установленными датчиком горизонта, датчиками перемещеиий подвесок опорных катков и датчиком пройденного пути, причем, последний соединен с интегратором, который в свою очередь связан с авто.матическим измерительным преобразователем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения профиля местности | 1976 |
|
SU661235A1 |
| Устройство для измерения рельефа местности | 1982 |
|
SU1089414A2 |
| Устройство для измерения рельефа местности | 1986 |
|
SU1339395A2 |
| Устройство для измерения рельефа местности | 1977 |
|
SU735918A2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РОВНОСТИ ПОКРЫТИЯ АВТОМОБИЛЬНЫХ ДОРОГ | 2023 |
|
RU2820228C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ДИАГНОСТИКИ РЕЛЬСОВОГО ПУТИ | 2007 |
|
RU2371340C2 |
| Способ определения временных и частотных параметров микропрофиля опорного основания в режиме реального времени | 2024 |
|
RU2833836C1 |
| Устройство для измерения рельефаМЕСТНОСТи | 1979 |
|
SU847035A2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ РЕЛЬСОВОГО ПУТИ | 1991 |
|
RU2026448C1 |
| Устройство для измерения рельефа | 1976 |
|
SU649950A1 |
ШЭ.сЬсЬбО
5678
1/
