(S) СИСТЕМА УПРАВЛЕНИЯ ТЕЛЕСКОПОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления телескопом | 1974 |
|
SU598019A1 |
| Система ориентации и стабилизации астрономического телескопа | 1989 |
|
SU1679466A1 |
| Устройство для астроориентации телескопа | 1975 |
|
SU697972A2 |
| Система астроориентации и стабилизации телескопа | 1978 |
|
SU769499A1 |
| Устройство для астроориентации телескопа | 1973 |
|
SU487377A1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| Система управления гелиостатамиСОлНЕчНОй пЕчи | 1978 |
|
SU805252A1 |
| Устройство для управления приводом робота | 1985 |
|
SU1405023A1 |
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 2006 |
|
RU2321073C1 |
| Система автоматического управления телескопом | 1980 |
|
SU974334A1 |
1
Изобретение относится к автоматике и MOweT быть использованр для автомати1 еского управления аппаратурой , например телескопами, уста- . новленными на подвижном основании.
Известны системы автоматического управле.ния телескопами, установленными в двухосном опорно-поворотном устройстве на подвижном основанииС и 2.
Наиболее близкой -к изобретению по технической сущности является си стема управления телескопом, содержащая двухосное опорно-поворотное устройство, внутренняя рамка которого механически связана с телескопом, двухкоординатный астродатчик, установленный на телескопе, первый и второй датчики угловой скорости, установленные на телескопе, первый и второй сумматоры, первые входы которых соединены соответственно с первым и вторым выходами двухко-ординатного астродатчика, вторые
входы сумматоров через блоки компен сации соединены с выходами первого и второго датчиков угловой скорости, а: выходы через усилители соединены с входами первого и второго исполни-тельных механизмов, первые выходы которых соединены соответственно с третьими входами первого и второго сумматоров, а вторые выходы механически связаны соответственно с на10ружной и внутренней рамками опорноповоротного устройства 31.
Однако с увеличением массы и габаритов современных телескопов и при ограниченных возможностях увеличе15ния жесткости редукторов приводов, конструкции самого телескопа и его крепления на подвижном основании возникает проблема влияния упругих деформаций на устойчивость и точность системы управления телескопом.
Отсутствие специальных мер по устранению или уменьшению влияния упругих деформаций приводит к уменыиению запасов устойчивости и значительному увеличению динамической ошибки системы как при отработке уп равляющих воздействий, так и при па рировании системой внешних возмущающих моментов, приложенных к носи телю. Эти факторы зависят от конструктивных параметров телескопа (его тензора инерции, жесткости, углов поворота рамок подвеса ), а также параметров движения носителя. Приче происходит одновременно искажение свойств системы в самих каналах и порождение паразитных динамических связей между каналами. Кроме того, наличие элементов, проявляющих упругие свойства в направлениях, в общем случае несовпадающих с направлением приложенных моментов, также приводит к усилению взаимного влияния каналов управления. Такими- элементами являются, например, фермы крепления основания те лескопа к носителю, фермы соединения отдельных агрегатов самого телескопа. Уменьшение влияния упругих деформаций за счет увеличения жесткости конструкции приводит к значитель ному увеличению массы телескопа, что неприемлемо для подвижного носителя по целому ряду причин. Целью изобретения является повышение точности системы управления телескопом за счет компенсации влияния упругих связей между основанием телескопа и подвижным носителем, упругостей в исполнительных механизмах и т.д. Поставленная цель достигается тем, д венно
что в систему, содержащую двуосное опорно-поворотное устройство, механически связанное с телескопом и с основанием телескопа, двухкоординатный астродатчик, установленный на телескопе первый и второй датчики угловой скорости, пульт управления и первый и -второй сумматоры, первые входы которых соединены соответственно с первым и вторым выходами двух координатного астродатчика, а выходы через последовательно соединенные соответственно первые и вторые не линейные регулируемые усилители соединены с входами соответственно первого и второго исполнительных механизмов, механически связанных с опорно-поворотным устройством и электрически подключенных выходами к вторым
датчиков угловой скорости и выходами первого и второго блоков, умножения, первые входы которых соединены с вторым и третьим выходами пульта упрэёления, а вторые входы - с выходами Соответственно первого и. второго датчиков угла, кинематически связанных с соответствующими исполнительными механизмами.
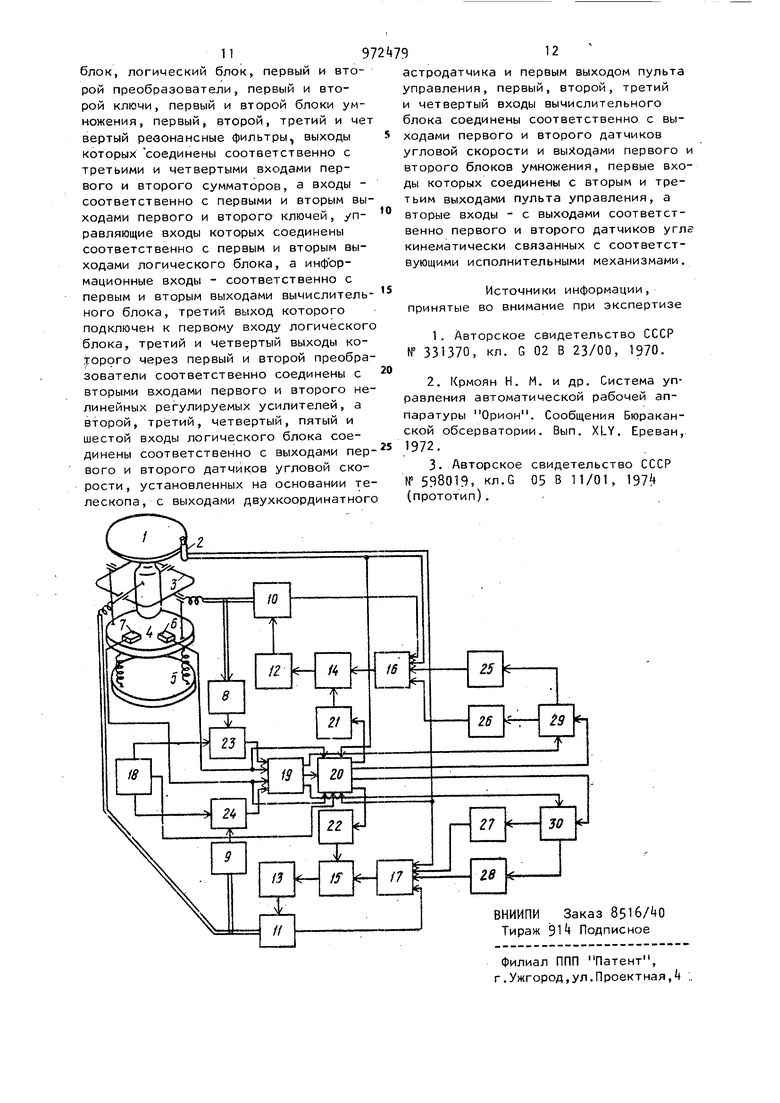
На чертеже представлена функциональная схема системы управления телескопом.
Система содержит телескоп 1, двухкоординатный астродатчик 2, опорноnoBopotHoe устройство 3, основание Ц телескопа, подвижный носитель 5 датчики 6 и 7 угловой скорости, датчики 8 и 9 угла, исполнительные механизмы 10 и 11, усилители 12 и 13, 94 входам соответственно первого и второго сумматоров, введены первый и второй датчики угла, вычислительный блок, логический блок, первый и второй преобразователи, первый и второй ключи, первый.и второй блоки умножения , первый, второй, третий и четвертый резонансные фильтры, выходы которых соединены соответственно с третьими и четвертыми входами первого и второго сумматоров, а входы соответственно с первыми и вторыми выходами первого и второго ключей, управляющие входы которых соединены соответственно с первым и вторыми выходами пепвого и второго ключей,, управляющие входы которых соединены соответственно с первым и вторым выходами логического блока, а информационные входы - соответственно с первым и вторым выходами вычислительного блока, третий выход которого подключен к первому входу логического блока, третий и четвертый выходы которого через первый, и второй преобразователи соответственно соединены с вторыми входами первого и второго нелинейных регулируемых усилителей, а второй, третий, четвертый, пятый и шестой входы логического блока соединены соответственно с выходами первого и второго датчиков угловойскорости, установленных на основании телескопа, с выходами двухкоординатного астродатчика и первым.выходом пульта управления, первый, второй, третий и четвертый входы вычислительного блока соединены соответстс выходами первого и второго 5972 79 нелинейные регулируемые усилители U, тери и 15, первый 16 и второй 17 сумма-; торы, пульт 18 управления, вычислительный блок 19 логический блок 20,, первый 21 и второй 22 преобразователи, первый 23 и второй 2 блоки умножения, первый 25, второй 26, третий 27 и четвертый 28 резонансные фильтры, первый 29 и второй 30 ключи. В предлагаемой системе управления телескопом подвижный носитель 5 связан через упругую конструкцию с основанием k телескопа, на котором в двухосном опорно-поворотном устройст ве 3 установлен телескоп 1, с которым механически связан двухкоординатный астродатчик 2. На основании Ц телескопа установлены датчики 6 и 7 угловой скорости. С внешней и внутренней рамками опорно-поворртного устройства 3 соединены соответственно первый 10 и второй 11 исполнительные механизмы. Система управления телескопом ра отает следующим образом. Сигналы с выхода двухкоординатного астродатчика 2, жестко закрепленного на телескопе 1, пропорциональны отклонению оси визирования телескопа 1 от исследуемой звезды. Исполнительные механизмы 10 и 11 поворачивают телескоп 1 в сторону уменьшен 1я возникшего рассогласования и сводят его к величине, называемой динамической ошибкой системы. Величина этой ошибки определяется добрютностью замкнутого контура и .харакмогочувс ческ 5 скоп занн О зомк возд J . 15 Р где 20 25 30 35 6 тикой нелинейного регулируеусилителя (величиной зоны невительности), а также динамими свойствами нагрузки .теле1с основанием k), упруго свяй с подвижным носителем 5. ратная передаточная функция раутого контура по управляющему йствию имеет вид .У(Р) . -Воп(Р)В„д(Р) Л(р)( 1-впо(«) c .c.ctPbB olPn , в„.(Р 1-В„п(Р) / Ч(Р) ip - передаточное число редуктора;Ар - собственный оператор силовой масти привода; Kj --коэффициент противоЭДС двигателя; К - коэффициент усиления усилителя;Кд,(- коэффициент передами датчика угловой скорости; KQ; - коэффициент обратной связи по скорости исполнительного механизма; г(р) передаточная фукнция астродатчика; ;(Р) передаточная функция датчика угловой скорости; (Р)- изображение ошибки системы;п изображение управляющего воздействия; I, амр ,опера тор влияния ос--ip l+lTg p нования на привод;
м)13 c + J , о5 о .1 А Р I
Р V Р /
|.р.1
.)
Ч обЧоператор влияния привода
на основание;
момент инерции телескопа; момент инерции двигателя; момент инерции носителя; момент инерции основания
телескопа
жесткость конструкции; коэффициент вязких потерь.
При условии ..K. и учитывая, что .(P)sl , 8 диапазоне мастот колебаний нагрузки получим
)) 1-Впо1Р)
.
Wripr Из анализа полученного выражения видно, что, подбирая указанным о6.разом коэффициенты передачи и динамические свойства первого 25 и второго 2б резонансных фильтров, можно компенсировать влияние упругих деформаций на динамическую точность систр.мы. В случае превышения амплитудой угловой скорости колебаний основа,Р, )(Р)
Мб(Р ЗУ),.,сРВ((Р)Ч-&оп()
8 ния ц порогового значения, задаваемого с пульта 18 управления и хранимого в логическом блоке 20, на ключ 29 (30) подается команда на переключение в каждом канале на второй 26 и четвертый 28 резонансные фильтры, которые реализуют другое условие компенсации, получаемое из выражения для передаточной функции системы; по возмущающему моменту, приложенному к носителю 5.
-fp
S,o(P)
- оператор влияния внешнего момента, приложенного к носителю 5. Поскольку ip,то ( . Далее пр W (Р,.. КРК1-8„о( )+сР Из анализа полученного выражения видно, что точность системы по отношению к возмущающему моменту повышается, что повышает динамическую точность системы. Анализ динамического взаимовлияния каналов управления в системе по казывает, что, чем больше амплитуда колебаний носителя 5 и их скорость тем выше взаимное влияние каналов. Таким образом, возникает необходимость введения дополнительных компенсирующих связей в каналах управления. В вычислительном блоке 19 производится сравнение динамических характеристик движения носителя 5 с заданными из пульта 18 управления, а также с параметрами относительног движения телескопа 1 по информации получаемой с датчиков 8 и 9 угла. При значительных колебаниях носителя 5 и больших относительных углах поворота рамок опорно-поворотного у ройства 3 друг относительно друга выполнении условия (Кс-Кд..,(;),получим 6мо(Р)(,(Р).6по(Р) сигнал из вычислительного блока 19 подается в логический блок 20, по сигналам с которого с помощью ключей 29 и 30 дополнительно вводятся сигналы с вычислительного блока 19 для компенсации динамического взаимовлияния каналов. Алгоритм работы вычислительного блока 19 может быть получен из анализа пространственной математической модели системы управления телескопом. Алгоритм вычислительного блока 19 реализуется на основе решения матричного уравнения. W(PJ-K(P)-diacg W(P)-К(Р)0 , где W(p) - передаточная матрицасистемы, разомкнутой по главным обратным связям; К(р) - передаточная матрица фильт ра компенсации динамического взаимовлияния основных каналов системы. W(P)) Х/д. (P)(E4B(P))+M,-j(P где N(P)- передаточная матрица механической части основны каналов системы; N:JJ(.P)- передаточная матрица динамических связей взаимо влияния в механической части; Ai(P) передаточная матрица при водов системы с отключен ной механической нагрузкой;В(Р)- передаточная матрица вли яния моментов со стороны нагрузки на приводы системы. (1;P40(,; (P) -коэффициенты уравнегде a, ний механической час ти ,зависящие от тензора инерции, углов поворота и параметров движения телеско па 1 и носителя (у ловых скоростей }; коэффициенты жесткос ти и потерь на внутреннее неупругое сопротивление упругих элементов приволов. Регулирование характеристики (зон нечув.ствительности} нелинейного регулируемого усилителя 1t ( 1 5 ) также позволяет компенсировать влияние упругости между основанием k телеско па и подвижным носителем 5. Задавая с пульта 18 управления на логической блок 20 предельно допустимое значение динамической ошибки системы и сравнивая его с текущими значениями сигналов рассогласования, получаемыми с двухкоординатного астродатчика 2, удается выбрать такое значение зоны нечувствительности, при котором одновременно удовлетворяются требования по точности слежения и по энергопотреблению исполнительных механизмов 10 и 11. Действительно, при нахождении величины динамической ошибки в зоне нечувствительности дви жение исполнительных механизмов 10 И 11 отсутствует, что снижает энергопотребление. Последнее обстоятельство особенно важно при работе системы в режиме сканирования пространства. Режим сканирования предусматривает ступенчатое перемещение оси визирования телескопа 1 сначала по одной координате (.образуя так называемую строку), затем производится сдвиг на малый угол по другой координате и процесс сканирования продолжается вдоль строки,причем движение по строке производится также ступенчато, с остановками через определенный угол для тога, чтобы обеспечить возможность анализа заданного участка пространства. Таким образом, при остановках телескопа 1 исполнительные механизмы 10 и 11 не потребляют энергии, так как ошибка системы находится в зоне нечувствительности нелинейного регулируемого усилителя 1 О5 ). Таким образом, предлагаемая система позволяет снизить ошибки системы более чем в два раза по сравнению с известной системой, а энергопотребление в режиме сканирования - на 2030 в зависимости от величины углов прокачки- телескопа. Формула изобретения Система управления телескопом, содержащая двухосное опорно-поворотное устройство, механически связанное с телескопом и с.основанием телескопа двухкоординатный астродатчик, установленный на телескопе, первый и .второй датчики угловой скорости, пульт . управления и первый и второй сумматоры, первые входы которых соединены соответственно с первым и вторым выходами двухкоординатного. астродатчика, а выходы через последовательно соединенные соответственно первые и вторые нелинейные регулируемые уси- . лители соединены с входами соответ- ственно первого и второго исполнительных механизмов, механически связанных с опорно-поворотным устройством и электрически подключенных выходами к вторым входам соответственно первого и второго сумматоров, отличающаяся тем, что, с целью повышения точности системы, она дополнительно содержит первый и второй датчики угла, вычислительный
