телескопа и олока датчиков угловых скоростей связалы согласующими следящимИ пр.ивода1м,и, а выход а аждого датчика угловых скоростей подключен ко зходу соответствующего ус :лительио-преобразоватзльного блока. Это позволяет прл переориентациях телеокопа согласовать осп чувстзительност.и датчиков угловых скоростей с осями управления телеокола .и .использовать их выходные сигналы, -пропорциональные угловЫМ cKOipocTHiM подвижного ооноваи-ия относительно осей хправления телескопа, для комлвнсацш скоростной составляющей ошибки стабиллзащм.
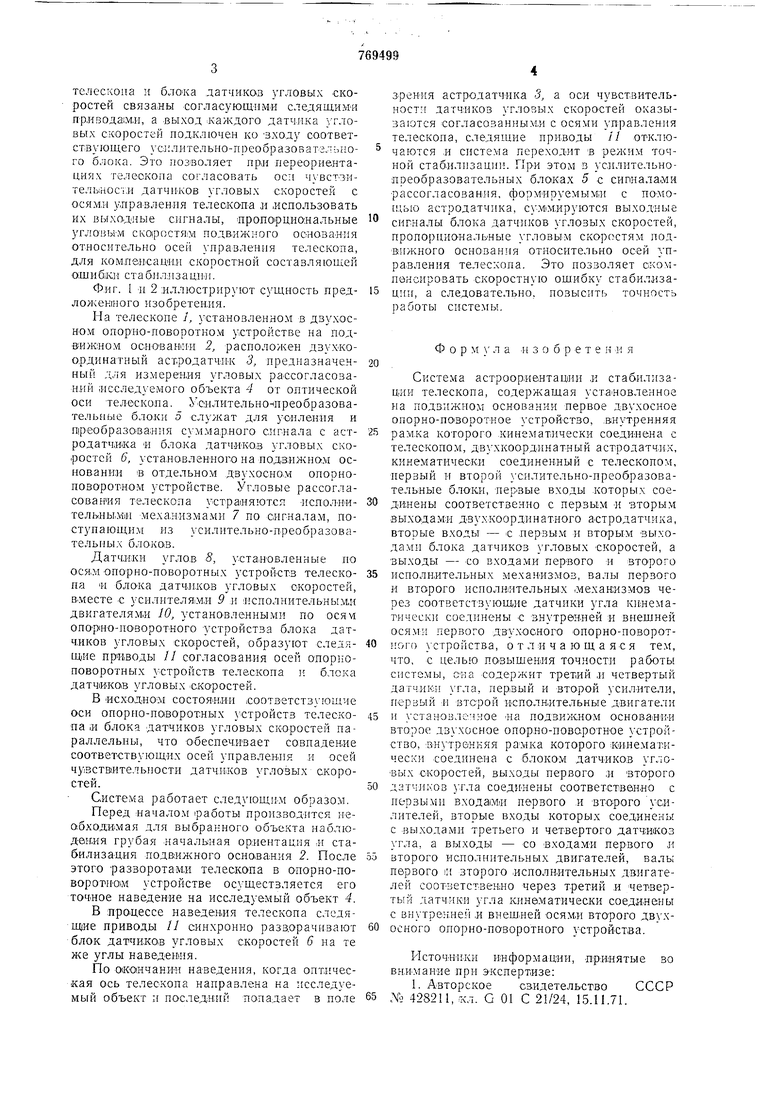
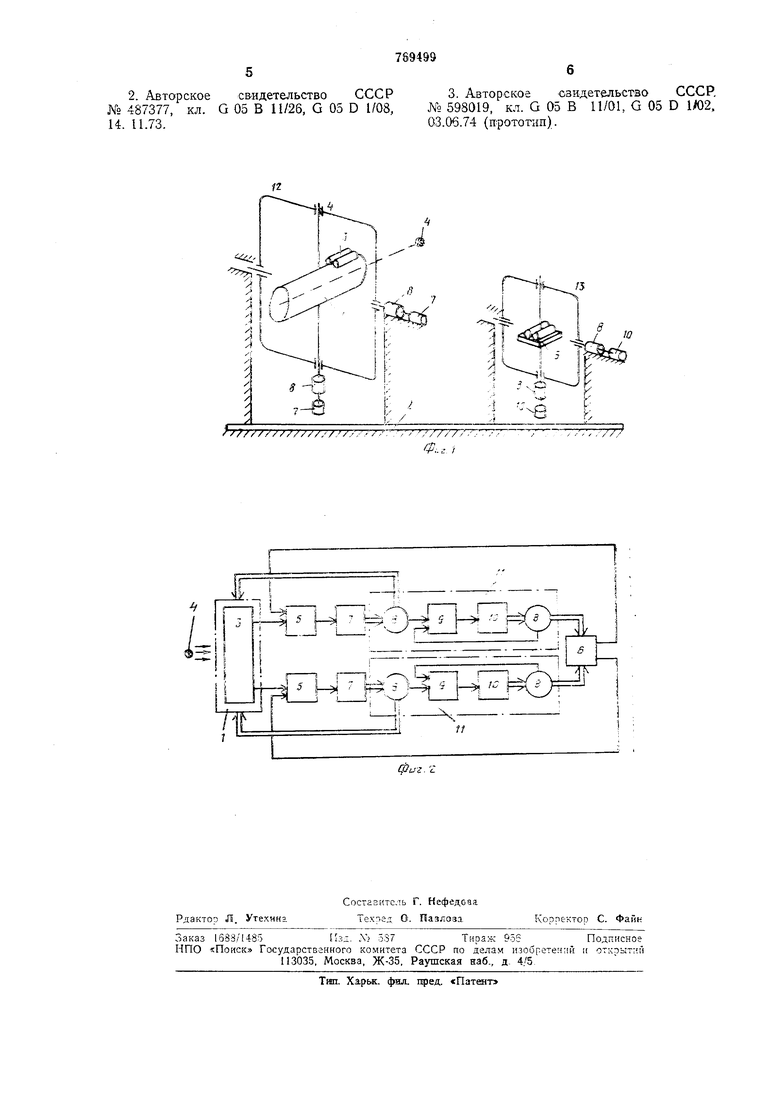
Фиг. 1 и 2 иллюстрируют сущность предложениого изобретения.
На телескопе /, )€тановленно.м в двухосном опорно-поворотном устройстве на подвижном основавии 2, расположен двухкоординатный аст.родатчи-к 3, предназначенный для измерения угловых рассогласований исследуемого объекта 4 от оптической оси телескопа. Усилительно преобразовательпые блоки 5 служат для уонленйя и П реобразо:ваипя суммарного сигнала с астродатчйка н блока датчиков угловых ско.ростей 6, установленного на подвижном основании в отдельном двухосно.м опорноповоротном устройстве. Угловые рассогласования телескопа устраняются исполнительны.ми меха.низмамн 7 по сигналам, поступаюи;им из усилительно-преобразовательных блоко.в.
Датчики углов 8, установленные по осям опорно-поворотных устройств телескопа И блОКа датчиков угловых скоростей, Вчместе с усилителя 9 и 1исполнительным,и двигателями 10, установленными по осям опорно-поворотного устройства блока датчиков угловых ско:ростей, образуют следяЩ|Ие приводы // согласования осей опорноповоротных устройств телескопа и блока датчиков угловых скоростей.
В исходнОМ состоянии соответствующие оси опорно-поворотных устройств телескопа ,и блока датчиков угловых скоростей параллельны, что обеспечивает совпадение соответствующих осей управления и осей чувствительности датчиков угловых скоростей.
Система работает следующи-м образом.
Перед началом 1работы пронаводится иеабходи1мая для выбранного объекта наблюдения грубая начальная ориентация и стабилизация ЛОДВ1ИЖНОГО основан,ия 2. После этого разворотами телескопа в опорно-поворотпом устройстве осуществляется его точное наведение на исследуемый объект 4.
В процессе наведения телескопа следящие приводы 11 синхронно разв.орачивают блок датчиков угловых скоростей 6 на те же углы наведевия.
По окончании наведения, когда оптическая ось телескопа направлена на исследуемый объект и последний попадает в поле
зрения астродатчика 3, а оси чувствительности датчиков угловых скоростей оказываются согласованными с осями управления телескопа, следящие приводы // отключаются и система переходит в режим точной стабилнзации. При этом в усилительнопреобразовательных блоках 5 с сипналамя рассогласования, формируемыми с помощью астродатчика, сум мируются выходные сигналы блока датчиков угловых скоростей, пропорциональные угловым скоростям подВ;ижного основания относительно осей управления телескопа. Это позволяет скомпенсировать скоростную ощибку стабилизации, а следовательно, повысить точность работы системы.
Формула и 3 о б р е т е к -и я
Система астроориентации ,и стабилизации телескопа, содержащая установленное на подвижном основании первое двухосное опорно-поворотное устройство, .внутренняя рам.ка которого .кинематически соединена с телескопом, дв}хкоордпнатный астродатчик, кинематически соединенный с телескопом, первый и второй усилительно-преобразовательные блоки, первые входы .которых соединены соответственно с первым и вторым выходами двухкоординатного астродатчика, вторые входы - ic первым и вторым выходами блока датчиков угловых скоростей, а выходы - со входами первого и второго исполнительных механизмов, валы первого и второго исполнительных .механизмов через соответствующие датчики угла кинематически соединены с внутренней и внещней осями первого двухосного опорно-поворотного устройства, отличающаяся тем, 11ТО, с целью повь шен1ия точности работы системы, Сна содержит третий и четвертый датчики угла, пер|Вый и Бто.рой усилители, первый н второй исполнительные двигатели и -становлемное на подвижном ocHOBaiHHH второе дз хосное опорио-иово.ротное устройство, внутрйнняя которого кинематически соединена с блоком датчиков угловых скоростей, выходы первого и второго датчиков угла соединены соответственно с первыми входами первого .и второго с,илителей, вторые входы которых соединены с выходами третьего и четвертого датчиков гла, а выходы - со входами первого и второго исполнительных двигателей, валы первого 1И второго исполнительных двигателей соответственно через третий .и четвертый датчики угла кинематически соединены с внутренней и внещией осями второго двухосного оиорно-поворотного устройства.
Источники информации, принятые во внимание при экспертизе:
1. Авторское свидетельство СССР ЛГ;} 428211, кл. G 01 С 21/24, 15.11.71.
2. Авторское свидетельство СССР № 487377, кл. G 05 В 11/26, G 05 D 1/08, И. 11.73.
3. Авторское -сзидетельство СССР. № 598019, кл. G 05 В 11/01, G 05 D 1/02, 03.06.74 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система ориентации и стабилизации астрономического телескопа | 1989 |
|
SU1679466A1 |
| Устройство для астроориентации телескопа | 1975 |
|
SU697972A2 |
| Система управления телескопом | 1980 |
|
SU972479A1 |
| Устройство для астроориентации телескопа | 1973 |
|
SU487377A1 |
| Система для астроориентации телескопа | 1976 |
|
SU648954A1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| Система автоматического управления телескопом | 1974 |
|
SU598019A1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 2004 |
|
RU2260773C1 |
| Система стабилизации изображения на подвижном основании | 2019 |
|
RU2753162C2 |
| СИСТЕМА АСТРООРИЕНТАЦИИ И СЛЕЖЕНИЯ | 1971 |
|
SU428211A1 |
Н
J -;:-
ГS
5 U г-1
г
