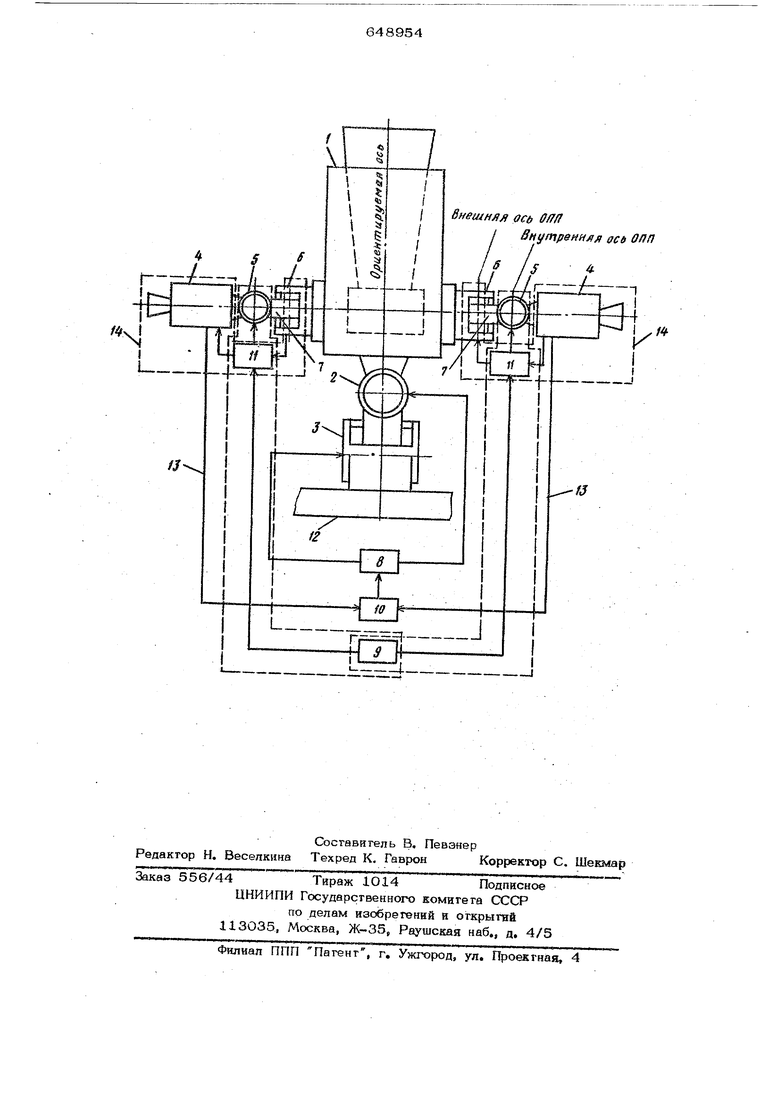
сгвенно со следящими приводами асгродагчиков 2J . Недосгагком данной системы является ограничение гочносги асгроориенгШхии телескопа точностью датчиков углов, свя- занных с осями подвесов астродатчиков. Целью настоящего изобретения является повышение точности системы. Указанная цель достигается тем, что астродатчики установлены неподвижно относительно внутренних осей двухстепенных карданных подвесов астродатчиков, а вторые выходы астродатчиков подключены соответственно к первому и второму вхо дам блока преобразования сигналов. При таких связях блоков системы измерения отклонения телескопа от требуемого положения осуществляется непосредственно астродатчиками, точность которых выше ria порядок и более точноети датчиков углов, установленных на осях двухстепенных карданных подвесов астродатчиков, а.насьпиение выходов астродатчиков предотвращается совместной работой приводов астродатчиков по осям внешних рамок их подвесов и приводов телескопа, управляемых сигналами астро датчиков после их прохождения через бло преобразования сигнгшов и третий усили-г тель. При этом астродатчики работают в системе как нуль-органы, что позволяет полностью использовать их точностные возможности для асфоориентации телескопа н снизить требования кточносга изготовления объективов астродатчиков, Система (см. чертеж) состоит из дву степенного карданного подвеса (ДКП) 1 телескопа, двух приводов телескопа 2 и 3, двух астродатчиков 4 и четырех элект ромеханических приводов (по два на каждый астродатчик) 5 и 6 по осям двухсте пенных карданных подвесов 7 астродат- чиков (ДКП АД). Привод 5 предназначен для поворота астродатчика 4 относительно телескопа вокруг внутренней оси ДКП АД 7, а привод 6 - для поворота астродатчика 4 вокруг внешней оси ДКП АД 7 Каждый электромеханический привод (2,3,5,6) состоит ИЗ исполнительного двигателя, механического понижающего редуктора, датчиков обратных связей по углу и по скорости и вспомогательных элементов, (концевые выклкнатели, телеметрические датчики утла в др.), которые расположены в корпусе привода. Кроме того в систему входят двухканальный усилитель 8, задающее устройство 9, блок преобразования сигналов 10 И два двухканальных усилителя 11 (по одному на каждые два привода АД). Система установлена, на подвижном основании (ПО) 12. Задающее устройство 9, усилитель il и привод 5 (или 6) образуют позиционный привод 13 каждого астродатчика 4. Астродатчик 4, усилитель 11 и привод 6 образуют следящий привод 14 каждого астродатчика 4. Для измерения разности между командным и действительным углами астродатчиков 4 в ПКП АД 7 используются пары вращающихся трансформаторов (ВТ), включенных в трансформаторном режиме, причем ВТ-датчики расположены в задающем устройстве 9, а ВТ-приемкики - в приводах 5 и 6. Система работает следующим образом Перед началом каждого сеанса работы выбирается объект наблюдения (ОН) и производится необходимая для выбранного ОН грубая трехосная начальная ориентация и стабилизация ПО 12, Номинальные параметры начальной ориентации ПО 12 рассчитываются для каждого ОН. После выполнения ориентации ПО 12 в задающем устройстве 9 производится набор командных значений углов астродатчиков 4 в ПКП АД 7. Затем оптические оси астродатчиков 4 автоматически ориентируются на командные- углы с помощью позиционных приводов 13 по внутренней и внешним осям ДКП АД 7. При этом ВТ-приемники приводов 6 подключаются ко входам усилителей 11, первые выходы астродатчиков 4 отключаются от входов усилите- лей 11, а вторые выходы астродатчиков 4 отключаются от входов блока преобразования сигналов 1О. По окончании двухосной установки по командным углам астродатчики 4 захватывают свои опорные звезды, что ватывают обеспечивается применением астродатчиков с достаточно широким полем зрения, перекрывающим возможные погрешности начальной ориентации и стабилизации ПО 12. При этом система готова к работе в режиме астроориентации телескопа. Прв переводе снстёлял в режим acTw роорнентацйн телескопа. ВТ-приемника приводов 6 отключаются ог входов уснлвгелей 11, первые выходы астродатчиков 4 подключаются ко входам соогвегсгвукяиих уснли гелей 11, а вторые выходы астродатчиков 4 подключаются соотвегсгвенно к первому и второму входам блока преобразования сигналов Ю.
Таким образом формируют четыре следящих привода, два из которых, управляемые сигналами рассогласования асгродатчнков 4, регулируют повороты астродатчиков 4 относительно внешних осей ДКП АД 7 так, что совмещают плоскости, проходящие через оптические оси телескопа и астродатчиков 4 с с ответствующими плоскостями, проходящими через оптическую ось телескопа и кажду из двух опорных звезд. Два других следящих привода, образованные последовательным соецинением блоков 4-1О-8-2 или 3, регулируют побороты телескопа относительно ПО 12 так, чтобы плоскости, проходящие через оптическую ось телескопа и направление на каждую из дву опорных звезд совпадали {при всех возможных движениях ПО 12) с соответствующими плоскостями, проходящими че-. рез направление на ОН и направления на те же опорные звезды. Указанные приводы с еспечивают навецение оптических осей астродатчиков 4 на их опорные звезды .и, как следствие, косвенную ориентацию телескопа на ОН. После этого сигналы рассогласования на вторых выходах астродатчиков 4 и управляющие напряжения на выходах блока преобразования сигналов 10 равны нулю и телескоп остается направленным на ОН. Если под действием возмущений, вносимых движением ПО 12, телескоп отклоняется от направления на ОН, то оптические оси астродатчиков 4 тоже отклоняются от направлений на свои опорные звезды, что порождает на выходах астродатчиков 4 сигналы рассогласования. Под действием сигналов с первых выходов астродатчиков 4 приводы 5 поворачивают астродатчики 4 относительно телескопа, а под действием Сигналов с вторых выходов астродатчиков 4, преобразованных в блоках 1О и 8, приводы 2 и 3 поворачивают телескоп с установленными на нем астродатчиками 4 так, чтобы свести к нулю
сигналы рассогласования на выходах астродатчиков 4.
Наличие стабилизации астродатчиков строго в направлении их опорных звезд
позволяет применять астродатчики, имек щие простой объектив с низким качеством построения изображения звезды во всех точках, кроме центра его фокальной плоскосги, а также име1йщие узкие зоны линейности статигстических характеристик и, следовательно, высокую разрешающую способность, что увеличивает в целом разрещающую способность системы.15
Формула изобретения
Система для астроориентации телескопа, содержащая установленный на подвижном основании двухстепенный карданный подвес Телескопа, связанный с двумя приводами телескопа, два астродатчика, установленных на телескопе .вдвухсг&пенных карданных подвесах астродатчиков, внешние оси которых параллельны, а внутренние - перпендикулярны оптической оси телескопа и связаны соответственно с позиционными и следящими приводами астродатчиков, блок преобразования сигналов, выход которого под- кпючен ко входу двухканального усилйгеля, выходы которого соединены соответственно с первым н вторым приводами телескопа, причем первые выходы астродатчиков связаны соответственно со сзтедящими приводами астродатчиков, отличающаяся тем, чго, с целью повышения точности системы, астродатчики установлены неподвижно относительно внутренних осей двухстепенных карданных подвесов астродатчиков, а вторые выходы астродатчиков подключены соответственно к первому и второму вхо- дам блока преобразования сигналов.
Источники информации, принятые во внимание при экспертизе
1,Авторское свндетельсгво СССР
№ 474788, юг. О5 В 11/26, 1972,
2.Авторское свидетельство СССР
№ 487377, кл. Q О5 В 11/26, 1973.
Внешня Л ось ffffff
вмутрениля ас б О fin

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для астроориентации телескопа | 1975 |
|
SU697972A2 |
| Устройство для астроориентации телескопа | 1973 |
|
SU487377A1 |
| СИСТЕМА АСТРООРИЕНТАЦИИ И СЛЕЖЕНИЯ | 1971 |
|
SU428211A1 |
| Система астроориентации и стабилизации телескопа | 1978 |
|
SU769499A1 |
| Система управления телескопом | 1980 |
|
SU972479A1 |
| Система ориентации и стабилизации астрономического телескопа | 1989 |
|
SU1679466A1 |
| Фотоэлектрическая следящая система гидирования телескопа | 1984 |
|
SU1228068A1 |
| Система автоматического управления телескопом | 1974 |
|
SU598019A1 |
| СТАБИЛИЗИРОВАННОЕ ТЕПЛОВИЗИОННОЕ УСТРОЙСТВО НАВЕДЕНИЯ | 1995 |
|
RU2099750C1 |
| Система астроориентации орбитального космического аппарата с обратными связями | 2023 |
|
RU2812876C1 |