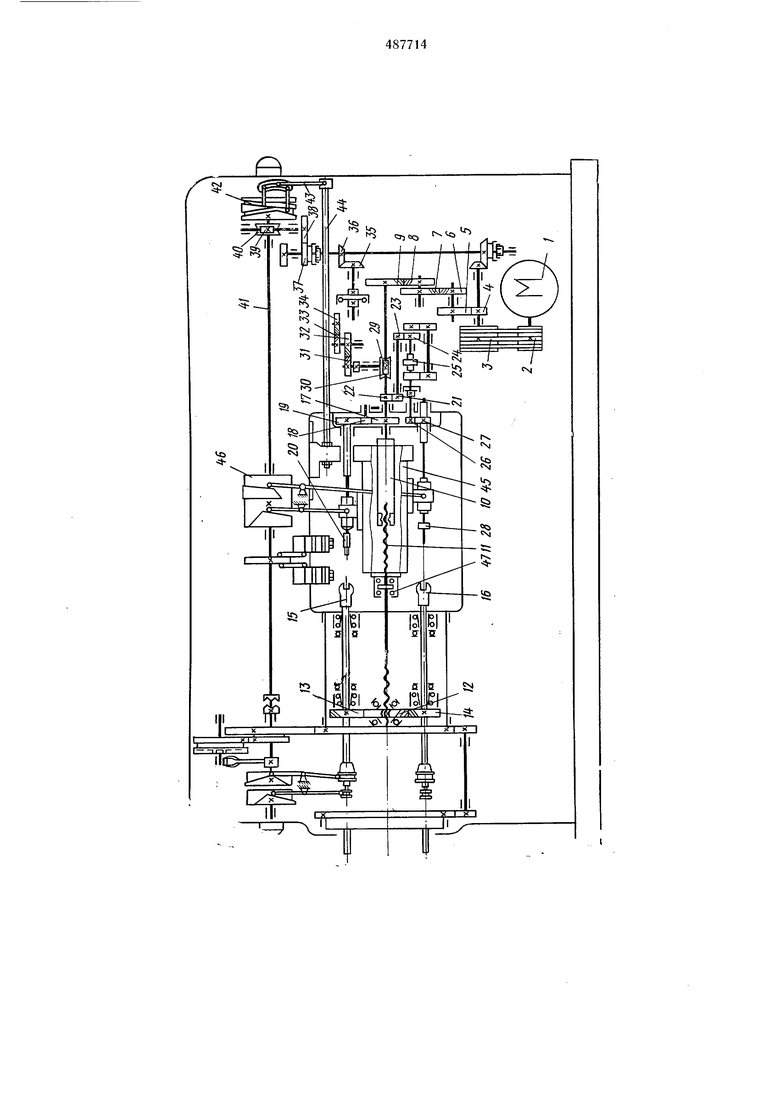
Известны токарные автоматы, содержащие привод главного движения и привод подачи инструмента. Однако известные станки имеют большие нагрузки в приводе подачи суппорта, что снижает их срок службы, надежность и точность обработки. С целью повышения срока службы в приводе главного движения предлагаемого автомата последовательно установлены винтовые несамотормозяш,иеся передачи, промежуточнов звено которых соединено с инструментальным суппортом. При этом, например, в случае многошпиндельного станка центральный вал привода вращения шпинделей выполнен составным. Одна из его частей - подвижна и соединена с инструментальным продольным суппортом и шлицевым соединением с ведущим и ведомым участками цепи вращения шпинделя, причем одно из шлицевых соединений выполнено винтовым, а суммарный угол наклона винтовых передач определяется из зависимости. ос-Й р Sa arctg где Еа - суммарный угол наклона винтовых передач, соединяющих подвижную часть составного центрального вала с ведущим и ведомым участками кинематической цепи привода вращения шпинделей;РОС - осевая составляющая сил резания инструментов, установленных на продольном суппорте; Мкр - крутящий момент, передаваемый центральным валом; d - средний диаметр шлицевинтовой передачи; Ifc - сумма сил сопротивления перемещению продольного суппорта. Для упрощения конструкции и технологии изготовления углы наклона щлицевинтовых передач соединения подвижной части центрального вала выполнены одинаковыми. На чертеже приведена кинематическая схема предлагаемого автомата. Автомат включает в себя кинематическую цеиь вращения шпинделей, содержашую электродвигатель 1, клиноременную передачу 2, 3, зубчатую передачу 4, 5, сменные шестерни - 6-9, центральный вал, выполненный из двух частей 10 и 11, представляющих собой две несамотормозящиеся винтовые передачи, раздаточную шестерню 12 и шестерни 13 и 14, расположенные на шпинделях 15 и 16; кинематическую цепь вращения сверлильного шпинделя, содержащую центральный вал 10, зубчатую передачу 17, 18, 19 и сверлильный шпиндель 20; кинематическую цепь прямого
и обратного вращения резьбонарезного шпинделя, включающую центральный вал 10, зубчатую передачу 21, 22, сменные шестерни 23, 24, муфту 25, зубчатую передачу 26, 27 и резьбонарезной щпиндель 28; кинематическую цепь подачи продольного суппорта, содержащую центральный вал 10, червячную передачу 29, 30, сменные колеса 31-34, конические шестерни 35, 36, шестерни 37, 38, червячную передачу 39, 40, раснределительный вал 41, барабан настраиваемого кулачкового механизма 42, двуплечий рычаг 43, штангу 44 и продольный суппорт 45.
На распределительном валу 41 установлен также барабан 46, на котором закреплены кулачки управления сверлильного шпинделя 20 и резьбонарезного шпинделя 28. На распределительном валу 41 закреплены также кулачки управления поперечными суппортами.
Автомат работает следующим образом.
При включении электродвигателя 1 по кинематическим цепям вращение получают щпиндели 15, 16, сверлильный шпиндель 20 и резьбонарезной щниндель 28. Одновременно получает вращение распределительный вал 41 и закрепленные на нем барабаны кулачковых механизмов подачи продольного суппорта 45 и поперечных суппортов сверлильного шнинделя 20 и резьбонарезного шпинделя 28.
При передаче крутящего момента центральным валом в винтовых передачах 10, 11 и И, 12 образуется осевая сила, которая через
упорные подшипники 47 воздействует на продольный суппорт в направлении движения подачи, разгружая тем самым кулачковый механизм 42 и штангу 44 от технологической нагрузки и сил сопротивления. Величина силы, разгружающей механизм продольной подачи, определяется углом наклона винтовых передач 10, 11 и 11, 12 и передаваемым центральным валом 10, 11 крутящим моментом. Из
вышеприведенной зависимости следует, что чем больше величина передаваемого валом 10, 11 крутящего момента, тем больше осевая сила, образуемая в винтовых передачах 10, 11 и II, 12 и тем в большей степени разгружается
механизм нодачи от составляюших технологической нагрузки. Это повышает точность работы механизма нродольной подачи, снижает износ его механизмов и повышает срок службы.
Работа остальных узлов и механизмов станка остается без изменения.
Предмет изобретения
Токарный автомат, содержащий привод главного движения и привод подачи инструмента, отличающийся тем, что, с целью повышения его срока службы, в приводе главного движения последовательно установлены
винтовые несамотормозящиеся передачи, промежуточное звено которых соединено с инструментальным суппортом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Токарный станок | 1978 |
|
SU994118A2 |
| Токарный станок | 1977 |
|
SU617170A1 |
| Токарный многошпиндельный станок | 1978 |
|
SU848144A1 |
| Переносной сверлильно-резьбонарезной станок | 1982 |
|
SU1060362A1 |
| Резьбонарезной автомат | 1972 |
|
SU593649A3 |
| Токарный кулачковый автомат для нарезания торцовой резьбы | 1981 |
|
SU994170A1 |
| ОДНОШПИНДЕЛЬНЫЙ АВТОМАТИЧЕСКИЙ ТОКАРНО-РЕВОЛЬВЕРНЫЙ СТАНОК | 1949 |
|
SU91305A1 |
| Универсальный многошпиндельный револьверный автомат | 1946 |
|
SU72327A1 |
| Роторный автомат | 1990 |
|
SU1722721A1 |
| Резьбонарезной станок | 1973 |
|
SU577104A1 |