1
Изобретение относится к области обработки металлов давлением и может быть использовано при создании средств механизации и автоматизации.
Известен ковочный напольный манипулятор, содержащий тележку с установленными на ней рамой хобота, механизмом разгрузки от опрокидывающего момента, шарнирно соединенным с верхней и нижней частями рамы тягами, и силовым цилиндром осевого перемещения хобота.
С целью упрощения конструкции манипулятора механизм разгрузки выполнен в виде двух криволинейных рычагов, каждый из которых шарнирно соединен одним концом с корпусом тележки, а другим с одной из тяг механизма разгрузки, при этом между рычагами соосно хоботу установлен связанный с ним силовой цилиндр, а один из рычагов соединен через упругий элемент с силовым цилиндром осевого перемещения хобота.
На чертеже схематически показано предлагаемое устройство.
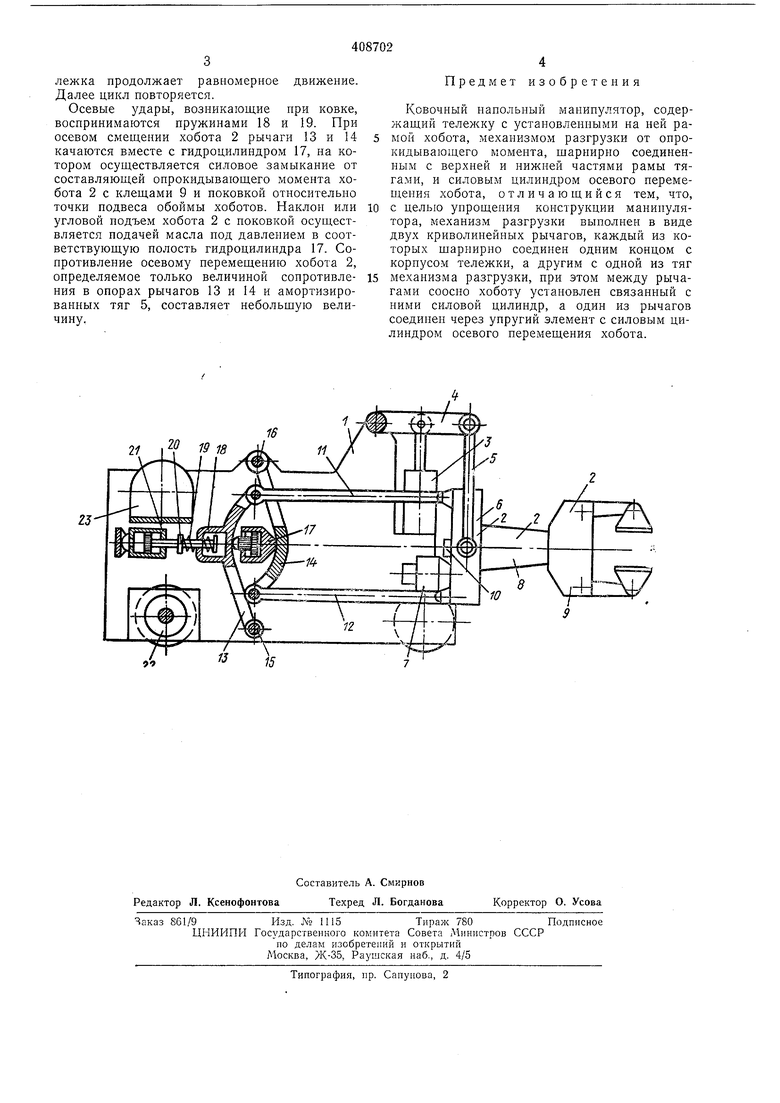
Манипулятор состоит из тележки 1, хобота 2, цилиндра 3 подъема, соединенного через рычаги 4 и амортизационные тяги 5 с обоймой хобота 6, на которой установлен механизм вращения 7 клещей, связанный через
зубчатую передачу с корпусом 8. Корпус с размещенными в нем клещами 9 и механизмом 10 зажима расположен внутри обоймы хобота 6 и имеет возможность вращаться.
Верхние 11 и нижние 12 тяги щарнирно соединены с обоймой хобота и с механизмом разгрузки от опрокидывающего момента, вынолненным в виде рычагов 13 и 14, которые имеют возможность качаться относительно
осей 15 и 16, монтированных в тележке. Между рычагами 13 и 14, которые при качании могут входить друг в друга, установлен гидроцилиндр 17. С рычагом 13 связан через пружины 18 и 19 шток 20 гидроцилиндра осевой нодачи хобота 21, шарнирно закрепленного на тележке 1, для перемещения которой используется механизм 22. Питание всех механизмов осушествляется от гидростанции 23. Поковка зажимается с помощью клещей 9
и механизма 10 зажима. Механизм 7 вращения устанавливает поковку в нужное угловое положение, а цилиндр 3 подъема придает ей нзжное положение по высоте. Для быстрого осевого неремещения поковки гидроцилиндр
21 смещает через рычаги 13-14 и тяги 11 - 12 хобот 2 с поковкой относительно тележки. В момент зажатия поковки в бойках кузнечного агрегата хобот останавливается, а тележка продолжает равномерное движение. Далее цикл повторяется.
Осевые удары, возникающие ири ковке, воспринимаются пружинами 18 и 19. При осевом смещении хобота 2 рычаги 13 и 14 качаются вместе с гидроцилиндром 17, на котором осуществляется силовое замыкание от составляющей опрокидывающего момента хобота 2 с клещами 9 и поковкой относительно точки подвеса обоймы хоботов. Наклон или угловой подъем хобота 2 с поковкой осуществляется подачей масла под давлением в соответствующую полость гидроцилиндра 17. Сопротивление осевому перемещению хобота 2, определяемое только величиной сопротивления в опорах рычагов 13 и 14 и амортизированных тяг 5, составляет небольщую величину,
Предмет изобретения
Ковочный напольный манипулятор, содержащий тележку с установленными на ней рамой хобота, механизмом разгрузки от опрокидывающего момента, щарнирно соединенным с верхней и нижней частями рамы тягамн, и силовым цилиндром осевого перемещения хобота, отличающийся тем, что,
с целью упрощения конструкции манинулятора, механизм разгрузки выполнен в виде двух криволинейных рычагов, каждый из которых щарнирно соединен одним концом с корнусом тележки, а другим с одной из тяг
механизма разгрузки, при этом между рычагами соосно хоботу установлен связанный с ними силовой цилиндр, а один из рычагов соединен через упругий элемент с силовым цилиндром осевого перемещения хобота.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОВОЧНЫЙ НАПОЛЬНЫЙ МАНИПУЛЯТОР | 1973 |
|
SU407622A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2010661C1 |
| Подвесной ковочный манипулятор | 1979 |
|
SU977095A1 |
| Ковочный манипулятор | 1980 |
|
SU935196A1 |
| Подвесной ковочный манипулятор | 1978 |
|
SU706176A1 |
| РУКА МЕХАНИЧЕСКАЯВ П Т БЙП .-':••-V. ^-;:^ Н о .-•' , -•-й(ц, -.••'..•,;:,.; | 1972 |
|
SU425714A1 |
| Напольная посадочная машина | 1971 |
|
SU473557A1 |
| Ковочный манипулятор | 1975 |
|
SU564080A1 |
| Манипулятор | 1979 |
|
SU812412A1 |
| Ковочный манипулятор | 1983 |
|
SU1082542A1 |
ZS
