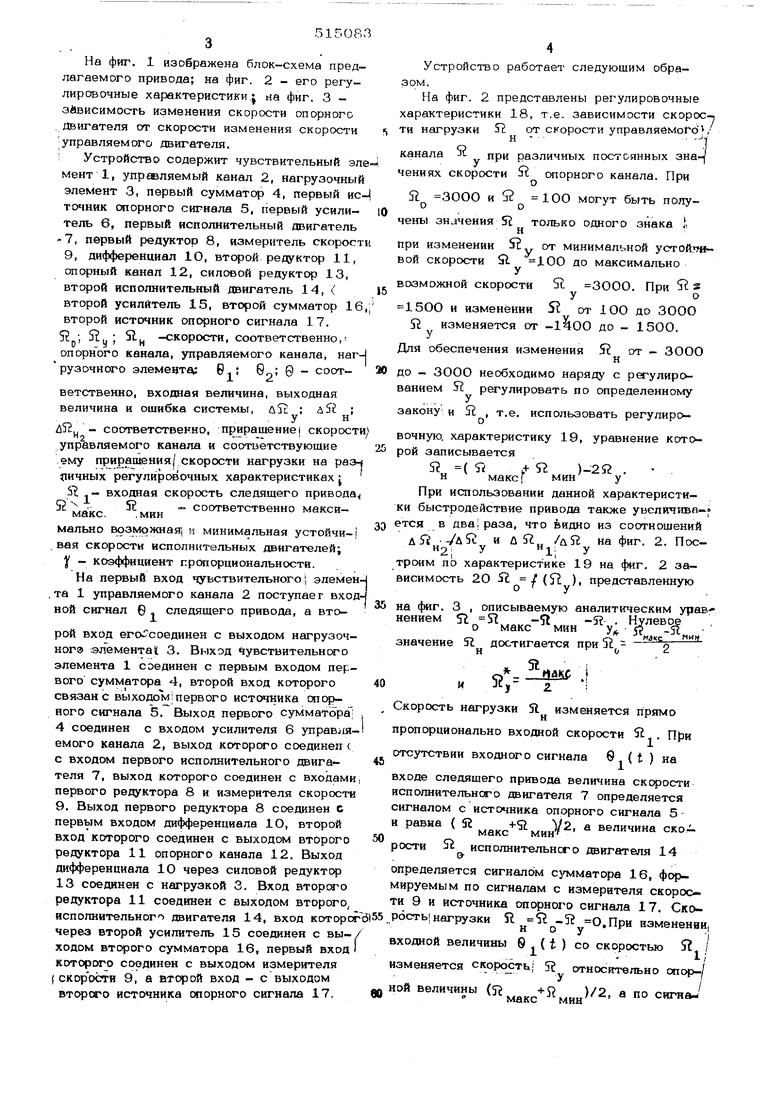
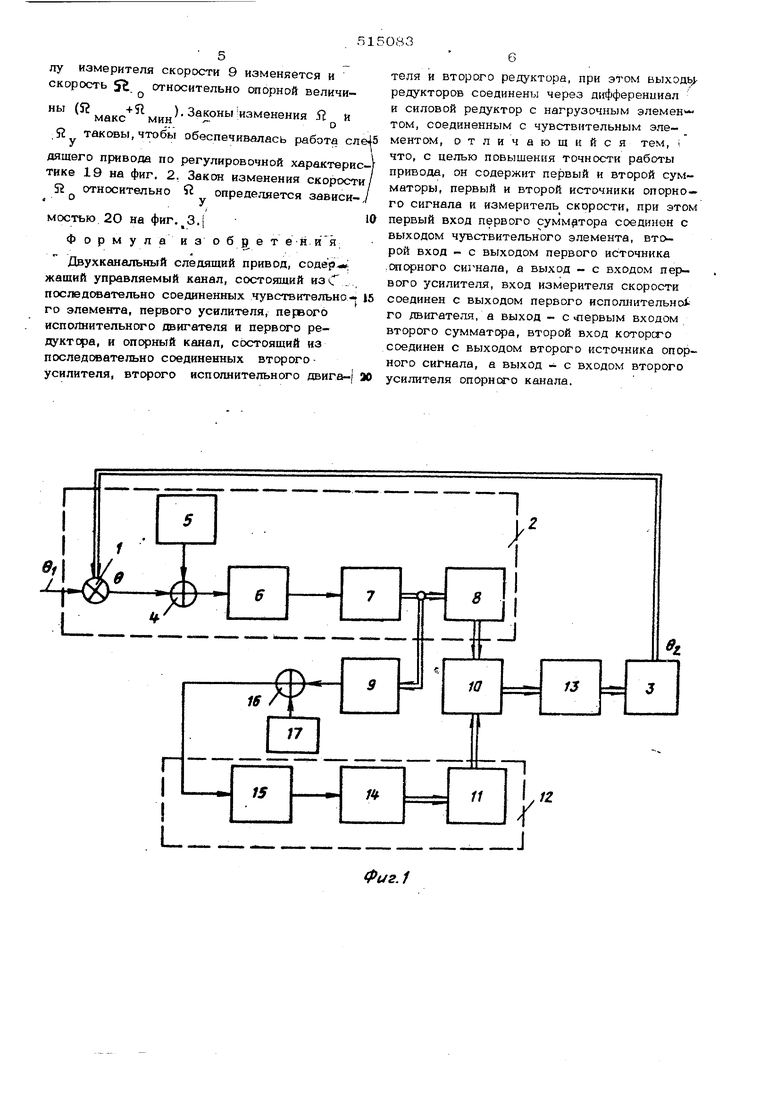
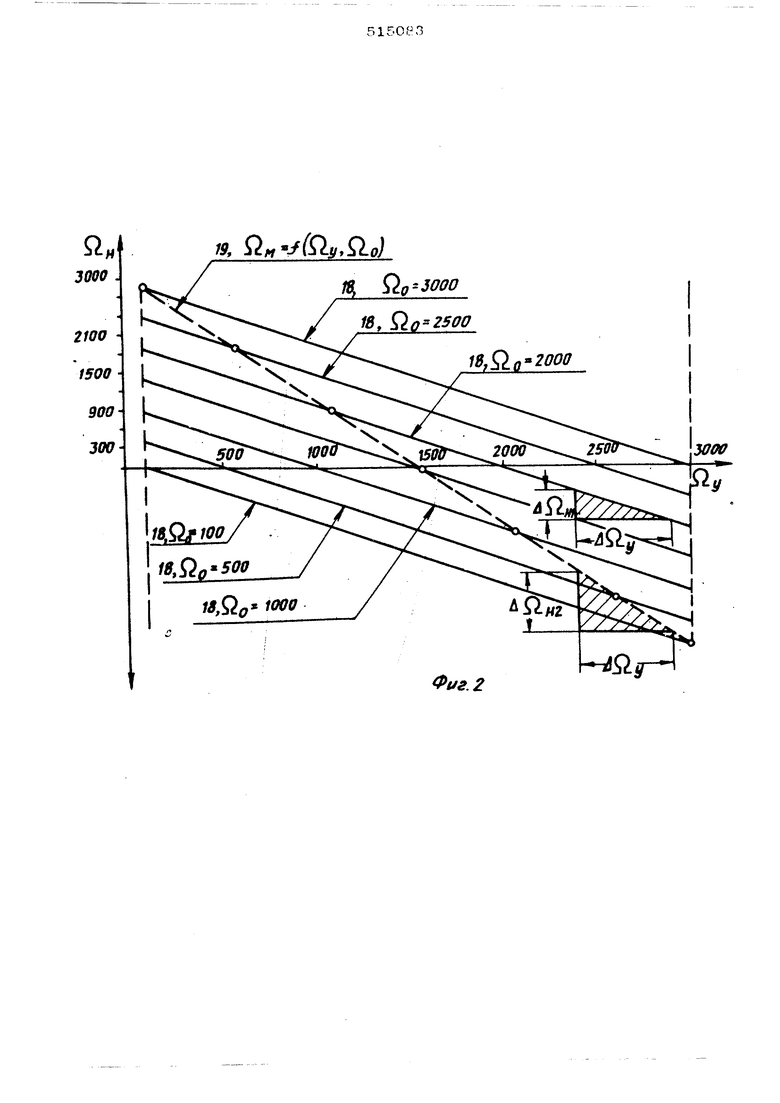
Изобретение относится к системам авто матического регулирования и может быть применено для построения прецизионных сле дящих приводов с широким диапазоном регулирсеания скорости в различных областях техники. Известен двухканальный следящий при-вод, содержащий .управляемый канал, состо щий из последовательно соединенных чувств тельного элемента, первого усилителя, первого исполнительного двигателя и первого редуктора, и опорный канал, состоящий из последовательно соединенных второго усилителя, второго исполнительного двигателя и второго редуктора, при этом выходы редукторов соединены через дифференциал и си Тювой редуктор с нагрузочным элементом, соединенным с чувствительным элементом. Недостатком известных приводов являет ся ограничение максимальной выходной S , что вызвано ограничением скорости минимальной ус- максимальной .тойчивой 51 скоростей управляемогоу мин канала. Опорная скорость 5 двигателя должна выбираться примерно равной половине диапазона рабочих скоростей двигателя, тобы обеспечить реверсирование скорости 5 без изменения направления вращения. двигателя. Ускорение нагрузки определяется лишь ускорением, развиваемым одним каналом, что ограничивает возможности привода по быстродействию. Цель изобретения - повышение точности работы привода. Для этого предлагаемый привод содержит первый и второй сумматоры, первый и второй источники опорного сигнала и измеритель скорости, при этом первый входпервого сумматора соединен с выходом чувствительного элемента, второй вход - с выходом первого источника опорного сигнала, а выход - с входом первого усилителя, вход измерителя скорости соединён с выходом первого исполнительного двигателя а выход - с первым входом второго сумматора, второй вход KOTj; poro соединен с выходом втоаого источника, опорного сигнала, а выход с входом второго усилителя опорн6го канала. На фиг. 1 изображена блок-схема предлагаемого привода; на фиг. 2 - его регулировочные характеристикиJ на фиг. 3 эйвисимость изменения скорости опорного Двигателя от скорости изменения скорости ; управляем ог о .цвигателя, Устройство содержит чувствительный эл мент 1, упревляемый канал 2, нагрузочный элемент 3, первый сумматор 4, первый ис точник опорного сигнала 5, первый усилиталь 6, первый исполнительный двигатель 7, первый редуктор 8, измеритель скорост 9, дифференциал Ю, второй редуктор 11, опорный канап 12, силовой редуктор 13, второй исполнительный двигатель 14, ( второй усилитель 15, второй сумматор 16 второй источник опорного сигнала 17. 5 ; ; 51 -скорости, соответственно, опорнЪго канала, управляемого канала, наг П . и рузочного элементу 6 0 - соотl 2 ветственно, входная величина, выходная величина и ошибка системы, uSt ; ли ; Л5,. - соответственно, приращение) скорост управляемого канала и соответствующие ему прирашения| скорости нагрузки на раз 1ичных регули}эовочных характеристиках j 5 - входная скорость следящего привода и . соответственно максимакс. ,мин мально возможная| и минимальная устойчи-j .вая скорости исполнительных двигателей; J - коэффициент прспорциональности. На первый вход чувствительного элемен , та 1 управляемого канала 2 поступает вход ной сигнал 6 следящего привода, а второй вход его соединен с выходом нагрузочногэ .элементаi 3. Выход Чувствительного элемента 1 соединен с первым входом первого сумматора 4, второй вход которого связан с выходом первого источника опорного сигнала 5. Выход первого сумматора 4 соединен с входом усилителя 6 ynpaBjm- емого канала 2, выход которся о соединен с с входом первого исполнительного двигателя 7, выход которого соединен с входами первого редуктора 8 и измерителя скорости 9. Выход первого редуктора 8 соединен с первым входом дифференциала 10, второй вход которого соединен с выходом второго редуктора 11 опорного канала 12. Выход дифференциала 10 через силовой редуктор 13 соединен с нагрузкой 3. Вход вторся о редуктора 11 соединен с выходом второго исполнительного двигателя 14, вход которо через второй усилитель 15 соединен с выходом второго сумматора 16, первый вход которого соединен с выходом измерителя (скорости 9, а второй вход - с выходом второго источника опорного сигнала 17. Устройство работает следующим образом. На фиг. 2 представлены регулировочные характеристики 18, т.е. зависимости скороети нагрузки 57 от скорости yпpaвляeмoГoj / Н - -. .j| канала 5 при различных постоянных зна-( чениях скорости Si опорного канала. При 51 ЗООО и 100 могут быть получены значения SI только одного знака I, н при изменении 5 от минимальной устой адвой скорости 51 100 до максимально возможной скорости 51 ЗООО. При 5 s Уо 15ОО и изменении 51 от 100 до ЗООО 5 изменяется от -1чОО до - 1500. Для обеспечения изменения 5 от - ЗООО до - ЗООО необходимо наряду с ра улированием Я регулировать по определенному закону и 51 , т.е. использовать регулировочную, характеристику 19, уравнение которой записывается 57 ( .+ S )-2П . имакс| мину При использовании данной характеристики быстродействие привода также увсличивя-- ется в два раза, что видно из соотношений дЛ и йЛ /д5 на фиг. 2. Построим по характеристике 19 на фиг, 2 зависимость 2О Л (51 ), представленную на фиг. 3 , описываемую аналитическим уравнением 5 Я -51 -5 . Ну левое о макс мин у S -5с мин, значение 5с достигается при .JL - g -,- - -naijif j и JCj- 2i Скорость нагрузки 51 изменяется прямо пропорционально входной скорости Si . При отсутствии входного сигнала Q (t ) на входе следящего привода величина скорости исполнительного двигателя 7 определяется сигналом с источника опорного сигнала 5 и равна ( К , +Si V2, а величина ско4. MclK.МИН рости исполнительного двигателя 14 определяется сигналом с гмматора 16, формируемым по сигналам с измерителя скорости 9 и источника опорного сигнала 17. Скоросты,нагрузки SI О.При изменении, входной величины Q ( t ) со скоростью S / .. 1 / изменяется )сть| 5В относительно опор-/ ной величины ( , а по сигн
лу измерителя скорости 9 изменяется и скорость 5 относительно опорной величи макс мин - ° « «« о ,52 у таковы, чтобы обеспечивалась работа сле45
дящего привода по регулировочной характерис-)тике 19 на фиг. 2. Закон изменения скорости/
определяется зависи-,/
г относительно
мостью 20 на фиг. 3.j
Формул а изобретения
Двухканальный следящий привод, содер- : жащий управляемый канал, состоящий изС . , последсдаательно соединенных чувствительно- 15 го элемента, первого усилителя, первого исполнительного двигателя и первого редуктора, и оперный канал, ссхлояший из псхзледсжательно соединенных второго усилителя, второго исполнительного дБИГа-j 30
6
теля и второго редуктора, при этом выходь редукторов соединены через дифференциал и силовой редуктор с нагрузочным элемен том, соединенным с чувствительным элементом, отличающийся тем, что, с целью повышения точности работы привода, он содержит первый и второй сумматоры, первый и второй источники опорного сигнала и измеритель скорости, при этом первый вход первого суммртора соединен с выходом чувствительного элемента, второй вход - с выходом первого источника опорного сигнала, а выход - с входом первого усилителя, вход измерителя скорости соединен с выходом первого исполнительной го двигателя, а выход - с «первым входом второго сумматс а, второй вход которого соединен с выходом второго источника опорного сигнала, а выход - с входом второго усилителя опорного канала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухканальный следящий привод | 1975 |
|
SU809050A2 |
| Двухканальный следящий привод | 1975 |
|
SU549781A1 |
| Двухканальная следящая система комбинированного регулирования | 1974 |
|
SU498603A1 |
| Следящий привод | 1974 |
|
SU641393A1 |
| Двухканальный следящий привод | 1973 |
|
SU497558A1 |
| Двухканальный следящий привод | 1975 |
|
SU572754A1 |
| Трехканальная следящая система | 1989 |
|
SU1716479A1 |
| Двухканальный электромашинный следящий привод | 1973 |
|
SU492850A1 |
| Следящий привод | 1974 |
|
SU550630A1 |
| Двухдвигательный следящий привод | 1975 |
|
SU742867A1 |
I
.J
Фиг.1
19, (y.o)
IB. o-5000
18,0-500
IS.QO- 1000 IB, 0-2500
1B,Q2000
Фиг. 2
О,
3000
2000
то
woo
20,9o-(yJ
3000
2000
.J
