1
Изобретение относится к приборам и системам автоматического управления и регулирования и предназначено для оптимального по быстродействию управления колебательными объектами с двумя управляющими воздействиями, обладающими чистым временным запаздыванием в контурах управления.
Известно устройство для оптимального управления колебательными объектами второго порядка, содержащее блок моделирования уравнений объекта в «отрицательном времени, соединенный входами и выходами с соответствующими входами блока синтеза оптимальной кривой переключения, другие входы которого подключены к выходу колебательного объекта второго порядка, а выходы соединены со входами блока формирования управляющего воздействия, выходы которого соединены со входами -колебательного объекта второго порядка. Однако оно непригодно для оптимизации по быстродействию объектов с несколькими ограниченными по модулю управляющими воздействиями, а также для оптимизации объектов с транспортным запаздыванием в контуре управления.
Описываемое устройство отличается тем, что оно содержит блок синтеза управлений модели, первый и второй входы которого подключены к выходам объекта, третий вход - к выходу блока синтеза оптимальной кривой
переключения, а выходы соединены со входами блока моделирования объекта в «отрицательном времени. Это расщиряет функциональные возможности устройства. Кроме того, в устройстве блок синтеза управлений модели содержит две пороговые схемы, шесть логических элементов «И и три триггера, причем выходы пороговых схем подключены к первому и второму входам блока синтеза
управлений модели, соединены с логическими элементами «И, связанными по входам с триггером, счетный вход которого подключен к третьему входу блока синтеза управлений модели, а выходы элементов «И соединены
с установочными и счетными входами двух других триггеров, выходы которых подключены к выходу блока синтеза управлений модели, а в блок синтеза оптимальных кривых переключения введены координатный преобразователь и распределитель, входы которого соединены с выходами координатного преобразователя и соответствующими входами и первым выходом блока синтеза оптимальных кривых переключения, а выходы соединены с
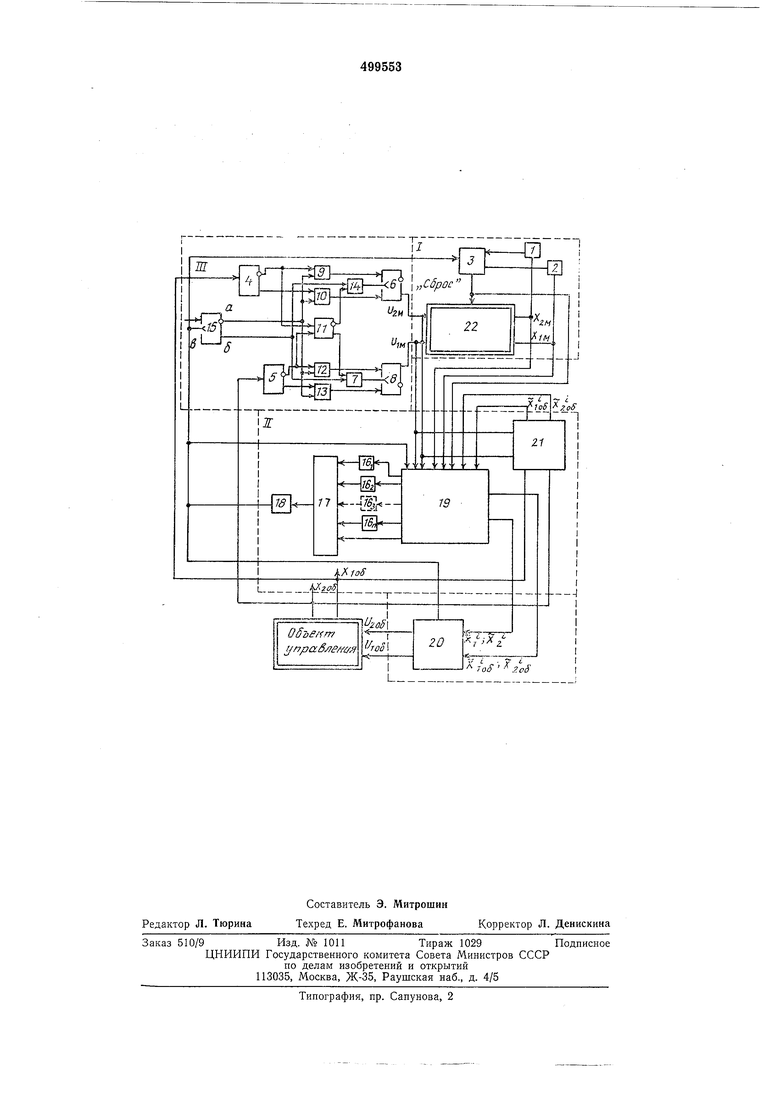
запоминающими устройствами, сумматором и другими выходами блока синтеза оптимальных кривых переключения, -входы координатного преобразователя соединены с соответствующими входами блока синтеза оптимальных кривых переключения. На чертеже приведена блок-схема устройства. Блок моделирования уравнений объекта в «отрицательном времени I содержит нуль-органы 1, 2 и схему сброса 3. Выходы блока I подключены ко входу блока синтеза оптимальных кривых переключения II. Блок синтеза управлений модели III, содержащий пороговые схемы 4, б, триггеры 6, 7, 8, и логические элементы «И 9-14, служит для образования на основе текущих значений фазовых координат объекта требуемых управлений модели (Уь и /гм и соответствующего их изменения при поступлении сигнала с блока синтеза оптимальных кривых переключения II. Выход блока синтеза управлений модели III, содержащего триггер 15, подключен к блоку моделирования уравнений объекта -в «отрицательном времени I и блоку синтеза оптимальных кривых переключения II. Блок синтеза оптимальных кривых переключения II содержит п запоминающих устройств 16, обеспечивающих последовательное построение я витков линий переключений, сумматор 17 и нуль-орган 18, фиксирующий совпадение соответствующих координат объекта и оптимальной кривой переключения. С целью построения линий переключения для двух управляющих воздействий блок синтеза оптимальных кривых переключения содержит распределитель 19, состоящий из логических, и ключевых схем, который по текущим значениям управлений t/iM и t/2M производит соответствующие коммутации, обеспечивая поступления требуемых переменных блока I и объекта регулирования в блок синтеза оптимальных кривых переключения II, и блок 20 формирования управлений объекта. Для построения оптимальных кривых переключения для указанного объекта при наличии чистого временного запаздывания в контуре управления данный блок содержит координатный преобразователь 21, состоящий из суммирующих и масштабных звеньев, выполненных на линейных решающих элементах и служащий для приведения переменных объекта к требуемой координатной системе, в которой строятся оптимальные кривые переключения для двух управляющих воздействий. Выход блока синтеза оптимальных кривых цереключения II подключен входом к блоку 20 формирования управлений объекта. Блок формирования управлений объекта, сопоставляя преобразованные фазовые координаты объекта и соответствующие координаты синтезированных линий переключения, формирует оптимальные управляющие воздействия, подаваемые на объект. Схема сброса 3 устанавливает нулевые начальные условия в убыстренной модели объекта 22 и переводит распределитель 19 в исходное состояние, при котором один из выходов убыстренной модели 22 цодключен к запоминающему устройству 16i, другая переменная убыстренной модели 22 и соответствующая координата объекта с координатного преобразователя 21 поступает на вход сумматора 17. Состояние блока синтеза управлений модели III, обусловленное сигналом «Исх. полож., таково, что на выходе «а триггера 7 имеет место «1, а на выходе «б - «О. При этом триггеры 6, 8, образующие L/IM и /Угм, через элементы 9, 10, 12, 13 устанавливаются в соответствующее состояние, согласно знаку координат XioG. и Х2оа., которые определяются пороговыдми схемами 4 и 5. Тем самым устанавливается связь между текущим состояиием объекта и управлениями t/u, и UZM, а значит воспроизводимой с помощью убыстренной модели 22 кривой переключения. При достижении переменной модели х в координатной системе {л:|значения, равного нулю, нуль-орган 2 посредством схемы сброса 3 возвращает мод ель в исходное положение и переводит распределитель 19 в состояние, при котором координата х подается в запоминающее устройство 1б2, а в запоминающем устройстве 16i запоминается значение координаты х, отвечающее концу интервала решения, и постоянно подается в еу.мматор 17. Подобно предьщущему случаю при равенстве координаты х1 нулю модель сбрасывается в нулевое состояние, а распределитель 19 отключает запоминающее устройство IGj и подключает к выходу модели 22 запоминающего устройства 16з. В запоминающем устройстве 1б2 запоминается значение координаты х, отвечающее концу интервала решения, которое суммируется в сумматоре 17 с сигналом запоминаюшего устройства 16i. В противофазе с сигналом с устройств /6i-n на вход сумматора с координатного преобразователя 21 поступает в данном случае переменная Xjgg,объекта управления, приведенная к той же координатной системе A:JJC,что и координата х В момент совпадения координат сигнал на выходе сумматора 17 становится равен нулю, и нуль-орган 18 вырабатывает импульс, поступающий в блок синтеза управтений модели III и блок 20 формирования управлений. Последний при этом определяет знак разности между преобразованной координатой . объекта, поступаюпдей через распределитель 19 от координатного преобразователя 21, и координатой оптимальной кривой переключения, равной х и подаваемой с распределителя 19, устанавливая согласно зависимости sign A:j- :JQgJ оптимальное значение управления i/io6.Импульс от нуль-органа 18 в блоке синтеза управлений модели 1П, попадая ца счетный вход «8 триггера 7, переводит его в иное состояние, в результате чего «1 появляется на выходе «б, а «О - на выходе «а. В этом случае логические элементы 9, 10, 12, 13 оказываются отключенными, чем исключается
управление триггерами 6, 8 по установочным входам согласно знаку фазовых координат объекта Хюе. и ,. Логические элементы «И 11, 14, на входы которых с триггера 7 поступает в данном Случае «1, возбуждают один из счетных входов триггеров 6, 8 в соответствии с состоянием элемента 11. Последний, сопоставляя сигналы пороговых схем 4, 5, обусловленные текущим состоянием объекта управления, имеет на прямом входе «1, если signxjoa. и signA:2o6. одинаковы, и «О - если различны; тем самым, если фазовая точка системы находится в первом и третьем квадрантах плоскости , то изменяет состояние триггер 8, а если во втором и четвертом- триггер 6. Этим устанавливается определенная последовательность в построении оптимальных кривых переключения, вызванная необходимОСтью определения оптимального значения для следующего управляющего воздействия.
Распределитель 19 при изменившемся значении i/iM, передает на сумматор 17 уже переменную xJo6. приведенную к той же координатной системе которой получена леременная модели к. При равенстве указанных координат срабатывает нуль-орган 18, вызывая определение sign ; - 2обЛ блоке 20 формирования управлений объектом, что дает оптимальное значение управления .- В то же время сигнал с нуль-органа 18, поступая в модель и распределитель 19, сбрасывает их в начальное состояние, а в блоке синтеза управлений модели переводит триггер 7 по счетному входу «в в состояние, при котором «1 вновь появляется на выходе «а. Тем самым значение управлений Lu, и f/2M вновь определяется знаком координат Хюб. и X2o6..
Формула изобретения
1. Устройство для оптимального управления колебательными объектами второго порядка, содержащее блок моделирования управлений объекта в «отрицательном времени, соединенный входами и выходами с -соответствующими входами блока синтеза оптимальной кривой переключения, другие входы которого подключены к выходу колебательного объекта второго порядка, а выходы соединены со входами блока формирования управляющего воздействия, выходы которого соединены со входами колебательного объекта второго порядка, отличающееся тем, что, с целью расширения функциональных возможностей устройства, оно содержит блок синтеза управлений модели, первый и второй входы которого подключены к выходам объекта, третий вход - к выходу блока синтеза оптимальной кривой переключения, а выходы соединены со входами блока моделирований объекта в «отрицательном времени.
2.Устройство по п. 1, отличающееся тем, что блок синтеза управлений модели содержит две пороговые схемы, шесть логических элементов «И и три триггера, причем выходы пороговых схем подключены к первому и второму входу блока синтеза управлений модели, соединены с логическими элементами «И, связанными по входам с триггером, счетный вход которого подключен к третьему входу блока синтеза управлений модели, а выходы элементов «И Соединены с установочными и счетньши входами двух других триггеров, выходы которых подключены к выходу блока синтеза управлений модели.
3.Устройство по п. 1, отличающееся тем, что в блок синтеза оптимальных кривых переключения введены координатный преобразователь и распределитель, входы которого соединены с выходами координатного преобразователя и соответствующими входами и первым выходом блока синтеза оптимальных кривых переключения, а выходы соединены с запоминающими устройствами, сумматором и другими выходами блока синтеза оптимальных кривых переключения, входы координатного преобразователя соединены с соответствующими входами блока синтеза оптимальных кривых переключения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для СИНТЕЗА ОПТИМАЛЬНЫХ УПРАВЛЯЮЩИХ | 1972 |
|
SU341013A1 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU813359A1 |
| Система оптимального управления объектами второго порядка | 1976 |
|
SU643833A1 |
| Устройство для синтеза оптимального управляющего воздействия | 1973 |
|
SU657409A1 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU805250A1 |
| Система оптимального управления объектом второго порядка | 1977 |
|
SU651308A1 |
| Система оптимального управления объектами второго порядка | 1980 |
|
SU920634A2 |
| Устройство для контроля средств числового программного управления | 1988 |
|
SU1675852A1 |
| Устройство для считывания графической информации | 1988 |
|
SU1606980A1 |
| Ультразвуковой дефектоскоп | 1988 |
|
SU1627974A1 |