1,
Изобретение относится « приборам автоматического управления и может -быть использовано, например, лри оптимальном управлении электроприводом, летательньши аппаратами и т. д., т. е. IBO iBcex случаях, копда объект управления может быть представлен линейным ,колебатель-ны:М эвеном второго иорядка с .чистым временны.м запаздыванием в контуре управления.
Из1вестны устройства для свнтеза оптимальных управляющих воздействий колебательными о.бъе1кта1ми втар-ого порядка с запаздыванием, содержащие сумматоры, ключи, объект управления, вход которого сое|ДИ1нен с выходом триггера, связанного своими входами с соответствующими выходами схемы сравнения, первый вход которой иепосредственно соеди.неи с первыМ выходом, а через схему управления .моделью - с первым входом модели, второе выход соединен со входом распределителя, овязастного своим первым выходом со .вторыми входами cxeiMbi сравнения и схемы управления моделью и с выходом схемы совпадений, входы которой через ячейки памяти соединены с соответствующи1ми выходами распределителя.
управления и з.начительные трудности аппаратурной реализации, обусловленные Heoi6xoдимостью построения поверхности (линии) переклЮчения, а также тот факт, что оптимальное по быстродействию управление достигается только для стационарного случая, т. е. для режима свободных движений объекта. Цель изобретения - достижение оптимального быстродействия в колебательной системе не только при свободном движении, но и при отработке ступенчатых входных воздействий, устранение влияния на динамику системы чистого времени запаз.дыва;ния в контуре управления м упрощение аппаратурной реализации оптимальных управляющих устройств колебателы1ыл1и объектами с запаздыванием. Цель достигается тем, что устройство доволнительно содержит коо.рдинатный преобразователь, первый выход которого соединен с третьим входом схемы сравнения, второй выход - с соответствующим входом схемы сов.падений, первый вход - с первым выходом объекта, второй выход которого соединен с первым входом первого 1сум.матора, связанного своим вторы,м входоМ с первылш входами второго и третьего сумматоров, а выход соединен со вторым входом .координатного
танивленно.го три-ггера, выходы Jioioporo соединены со вторыми входами соответственно второго и третьего сум-маторов, причем выход второго icvMiMaTOpa ;соеди1иен с третьиим входом координатного преобразователя и через параллельно соединеияые .ключи - с соответствующими Входами модели Объекта, выход третьего сумматора соедииен с четвертым входом .координатного преобразователя и через Параллельно соедилевные ключи - с сооТ|Ветств}-Ю:Щими входами модели объекта, а вторые входы ключей соединены с соответствую;щи.ми выхода ми распре-делителя.
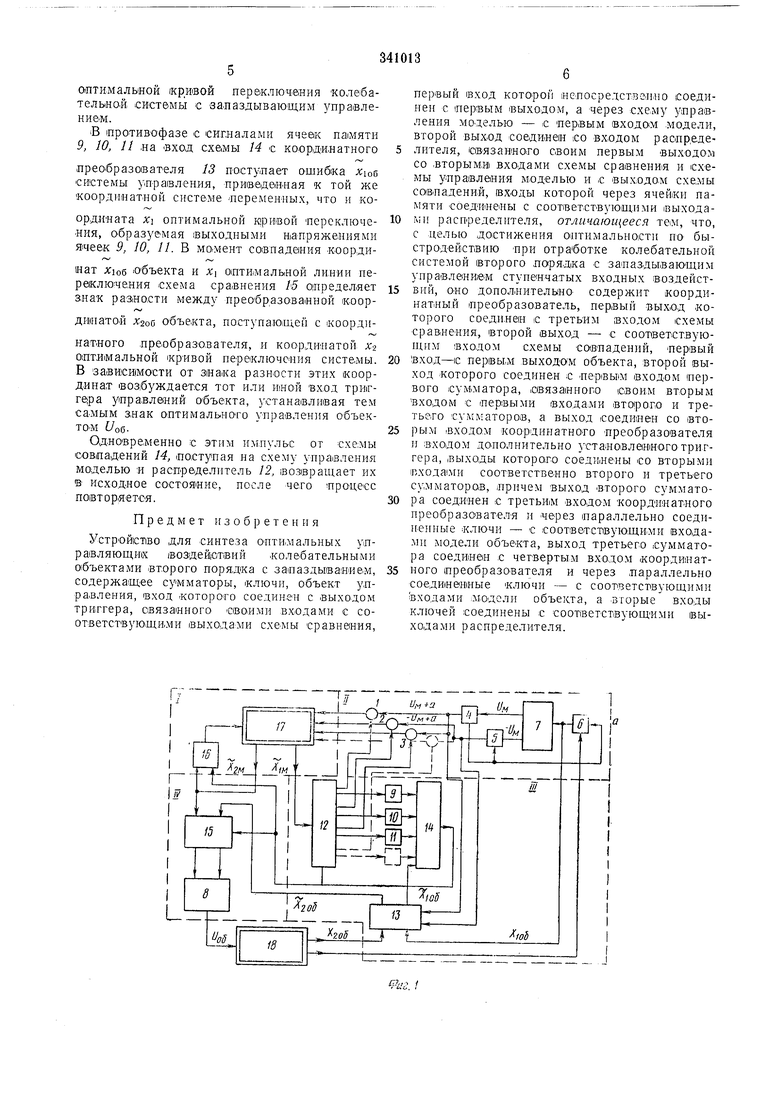
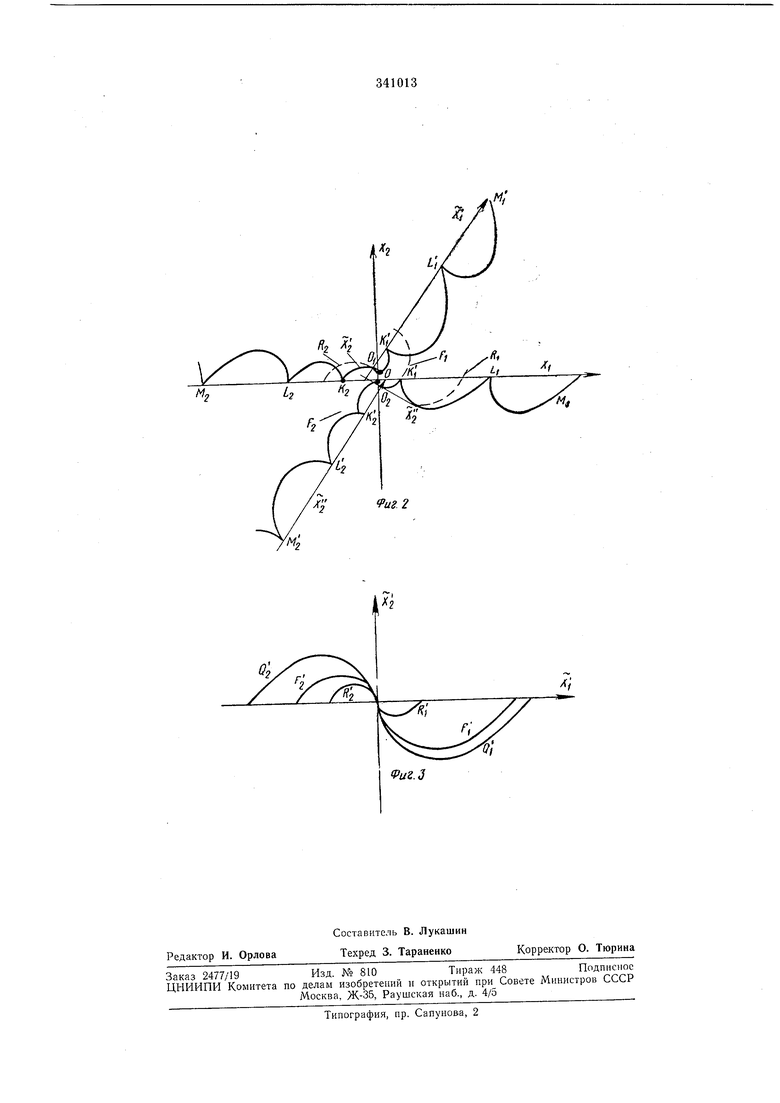
На фиг. 1 изображена блок-схема предлагаемого устройства; да фиг. 2 даны остти.маль«ые кривые (переключения коле-бателыной системы с залаздываннем л управлении и без него; 1на фит. 3 представлены фазовые траектории модели, образующие ояти.мальиую кривую лереклЮченИЯ .колебательной системы с запаз.дывающнм управлением.
Устройство содержит ключи /, 2, 3, сумматоры 4, 5, 6, триггеры 7, 8, Ячейки ламяти 9, 10, 11, распределитель 12, 1координат.ный преобразователь 13, схему совпадений 14, схему сравнения 15, схему 16 управления моделью, модель 17, объект управления 18.
Блок I устрой1СТ1ва представляет собой убыстренную м.одель, движение которой определяется уравнением объекта, записанны,м для
координат .-1 (,ч} в «обращенном времени.
Блок II (В зависимости от фазово.го состояния Объе-кта управления выра батывает управляющие переменные модели, определяющи.е со.бой построение или иного 1В.ит«а оптимальной линии переключения.
Блок 1П воспроизводит из фазовых траекторий модели оптимальную кривую переклю.чения.
Блок IV, сопо1ста1вляя фазовые «о-ординаты объекта .н синтезированной линии переключения, формирует оптжмалыные управляющие воздействия, поступающие иа объект.
Число используемых ключей и запоминающих устройств обуславливается областью возможных фазовых состояний объекта, а
значит, и 1ЧИСЛ01М (воспроизводимых IBHTKOB
.кривой переключения.
Сумматоры 4 VI 5 форм1фуют управляющие воздействия соотвест1венио f/M-f-a и -f/M+fl, где ,fi - заданное ана.чеиие регулируемой перемен-ной.
Работает устройство следующим образом.
Если те-кущее значение ошибки системы
, то при сигнале (1+а), поступающем через ключ / на первый вход модели, фазовая траектория модели описывает дугу Fl в
ту xl дуги оптнмалыной кривой переключения OKiLiMi.... При достижении
координатой Х2М модели значения, равного нулю, схема 16 управления моделью возвращает последнюю в .исходное (нулевое) положение и переводит рас1пре.делитель 12 в со-, стояние, при котором выход модели подключен к ячейке памяти 10, а на в.ход моделиругощего блока через ключ 2 поступает управляющий сишнал (-1+й)- В ячейке памяти 9
запоминается значение коорди.наты xl, соответствующее .концу интервала рещения, т. е.
точки /( (фиг. 2), которое постоянно поступает в схе,му совпаден.ий 14. Таким о,бразо-м начало координат переносится в точку /Cl, откуда начинается построение следующего витка линии пере.ключ.ения. Поскольку коэффищиент передачи по второму входу .модели и управляющий сигнал соответственно равны (-тр) и (-1+а), .где т - масщтабный коэффициент, за1В.исящий от пара метров системы, то по окончании .импульса сброса со
схемы управления 16 фазовая траектория модели списывает дугу в координатной
системе xtx (фиг. 3). Координата XIM, поступающая в схему совпадений 14 из ячейки
памяти 10, дает в этом слзчае координату xl дуги о.птн1мальной кривой пераключе.НИ.Я OK, (фиг. 2). Аналогично преды.дущему случаю при равенстве координаты
нулю срабатывает схема управления .моделью, вновь возвраща.я мо.дель в исходное состояни.е .и переключая ра.спр.едели1тель 12 так, что выход моделирующего бло1ка под.соединяется к ячейке памяти // и посредством
.ключа 3 ко1ммутируется очередной, третий вход мо.дели. Напряжение ячейки памяти 10,
соответст1вующ.ее координате х конечной точки дуги 1, сум.мируется в схеме совпадений 14 с сигналом ячейки памяти. 9, сдвигая г
тем сам.ы.м иачало коор.динат системы xlXz в точку Lz. Все последующие построения выполняются 1по.добным же 0|бразом.
Прн , состояние триггера 8 таково, (ЧТО с сум.маторов 4 -я 5 на входы модеЛИ ч.ерез ключи /, 3,... и 2, 4,..., соответственно поступают управляющиевоз.действи1Я (-1+а) и (l-i-a). Фазовые траектории при: этом описьшают дуги fa, 2, Qz, (фиг. 3) IB системе переменных , координаты которых, поступая через распределитель 12 иячей.ки памяти &, 10, 11 «а схему совпадений 14,
дают координату х оптимальной кривой пеолтималыной переключения колебательной системы с запаздывающим управлением.
В оротивофазе с сигналами ячеек па1мяти 9, 10, 11 на ВХОД схемы 14 с коордигнатного
прео бразавагеля 13 поступает ошибка хю системы управления, приведенная к той же координатной системе .перемеиных, что и координата лг оптимальной кривой переключения, образуе-мая выходными напряжениями ячеек 9, 10, 11. В мо.меит совпадения координат Хюб Объекта и х оптимальной линии переключения схема сравнения 15 ощределяет знак разности между преобразованной коор1двпатой Х2оъ объекта, поступающей с координатного нре.образо,вателя, и координатой лг оптнмальной крнвой переключения систе,мы. В за|ВИ СИ(мости от знака разности этих координат 1ВОЗ|буждается тот или И1ной вход тригreipa управлений объекта, устанавливая тем самым знак оптимального управления ОбъекТОМ боб.
Одновременно с этим нм.пульс от схе;мы совпадений 14, поступая на схему упра.вления моделью н распределитель 12, возвращает их В исходное состояние, после чего нро-цесс повторЯетоя.
Предмет и з о б р е т е н и я
УстрОЙст|ВО для синтеза оптимальных управляющих 1ВОЗДей|Ствий колебательными 01бъектами второго порядка с запаздыванием, содержащее сумматоры, ключи, объект управления, вход Которого соединен с Выходом триггера, связаниого свонми входами с соответствующими выходами схемы сравнення,
первый вход которой непосредствсагно соединен с первым выходом, а через схе:Му управления моделью - с первым входом .модели, второй выход соеДИнен со входом раснределителя, связаннОГо своим первым выходом со -вторыми входами схемы сравнения и схемы управления моделью и с выходом схемы саВПадений, (ВхХОды которой через ячейки памяти соединены с соответствующими выходами распределителя, отлича1ои(ееся тем, что, с целью достижения оптимальности по быстродействию нри отработке колебательной системой второго порядка с запаздывающим управлением ступенчатых входных воздейстВИЙ, оно допоЛИительно содержит координатный преобразователь, первый выход которого соединен с третьим входом схемы сравнения, второй выход - с соответствующим входом схемы со1внадений, первый
:вход-1C первым выходом объекта, второй выход которого соединен с Нервьпм входом первого суММатора, связанного С(Воим вторым ВХОДОМ с первыми входалги STOiporo и третье.го сумматоров, а выход соединен со вторым входом координатного преобразователя и входом дополнительно установленного триггера, выходы которого соединены со вторыми 1лхода1ми соответственно второго и третьего сумматоров, причем выход Второго сумматора соединен с третьи1М входом координатного преобразователя и через параллельно соединенные ключи - с соответст1вующими входами модели объеКта, выход третьего сумматора соединен с четвертым входом координатного преобразователя и через параллельно соедине1иные ключи - с соответствующими входами людсли объекта, а вторые входы ключей соединены с соответствующими выходами распределителя.
Риг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для оптимального управления колебательными объектами второго порядка | 1973 |
|
SU499553A1 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU813359A1 |
| Система оптимального управления объектами второго порядка | 1980 |
|
SU920634A2 |
| Система оптимального управления объектами второго порядка | 1976 |
|
SU643833A1 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU805250A1 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU798704A1 |
| Устройство для синтеза оптимального управляющего воздействия | 1973 |
|
SU657409A1 |
| Система оптимального управления с моделью объектами второго порядка | 1980 |
|
SU888071A1 |
| УСТРОЙСТВО для СИНТЕЗА УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ | 1965 |
|
SU171671A1 |
| Система оптимизации режимов работы объекта | 1985 |
|
SU1260916A1 |
Q.
i
