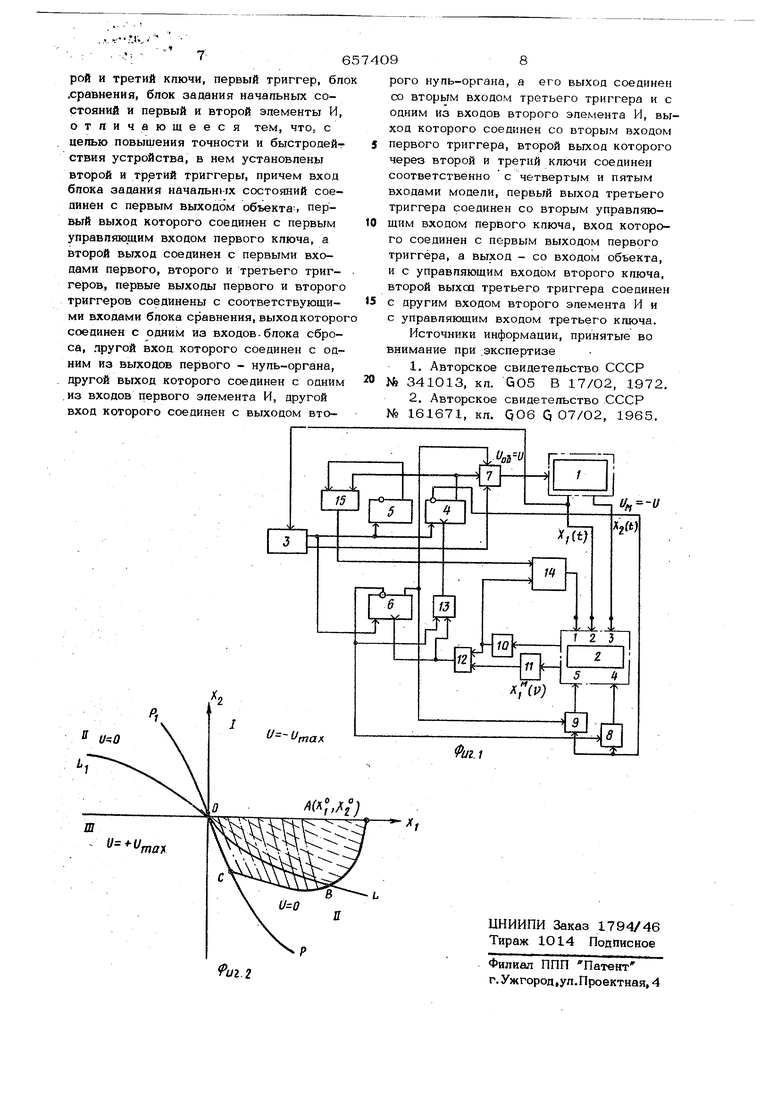
триггеров. Первые выходы первого и -второго триггеров соединены с соответ ствующими входами блока сравнения, выход которого соединен с одним из вхо дов блока сброса, другой вход которого соединен с одним из выходов первого нуль-органа,другой выход которого соединен с одним из входов первого элемен та И, другой вход которого соединен с выходом второго нуль-органа, а его выход соединен со вторым входом третьего триггера и с одним из входов второго элемента И. Выход этого элемента сое динен со.вторым входом первого триггера, второй выход которого через второй и третий ключи соединен соответственно с четвертым и пятым входами модели первый выход третьего триггера соединен со вторым управляющим входом перв го ключа, вход которого соединен с первым выходом первого триггера, а выход со входом объекта, и с управляющим входом второго ключа, а второй выход третьего триггера соединен с другим входом второго элемента И с управляющим входом третьего ключа. На фиг. 1 представлена блок-схема устройства для синтеза оптимальных управляющих воздействий; на фиг. 2 - оптимальные по расходу топлива линии переключения. Устройство включает в себя объект управления 1, управляемую модель 2, блок 3 задания начальных состояний, первый, второй и третий триггеры 4, 5, ,6.,первый, второй и третий ключи 7,8,9 первый и второй нудь-орган 1О, И:, пер вый и второй элемент И 12, 13, блок сброса 14 и блок сравнения13. . На схеме даны такие обозначения: управляющее воздействие) и - текущее значение управляющего воздействия, - максимальное значение управляющего воздействия; (Vlрегупируемая переменная; XgCi)- линейна комбинация регулируемой переменной и ее производной; Л) и - координаты модели;ЬО11 и POR.- линии переклю чения. Для репейных неколебательных систе второго порядка оптимальными, в смысл критерия, 3 fc/U/ -K)di, со о где U - управляющее воздействие, ограниченное условием /U/i5:U При этом упракпяюшое устрпйство, синтезирующее оптимальные управления в функции фазовых переменных системы, должно реализовать нелинейный закон управления, определяемый на фазовой плоскости уравнениш ш линий переключения видаЬОЬ и РОР . Кривые переключения LOL н данном случае оказываются подобными, отличаясь лишь постоянным коэффициентом, который зависит от значения К, входящего в (1). В обоих случаях уравнения, описывающие LOL и POP, в функции переменных )n 2Ct), могут быть получены как решение уравнений динамики объекта при значениях управляющего воздействия. Указанные кривые разбивают фазовую плоскость на триобласти I , l , Ml , оптимальные значения управлений в которых соответствуют приведенным на фиг. 2. Достижение фазовой точкой системы кривой LOL определяет отключение управления объекта ( U О) и свободное движение системы. Как только в результате такого движения фазовая точка достигнет линии переключения РО , образованной из частей траекторий системы при управлении; -Umax и -fUrnax управляющее воздействие принимает соответствующие значения и дальнейшее движение, как и в обычной оптимальной по быстродействию системе, происходит по траекториям РО или Р О. Устройство работает следующим образом. Бпок 3 задания начальных состояний при отклонении значений координаты объекта X(t) от нулевых производит начальную установку триггеров 4, 5, 6 и дает сигнал 1 на первый управляющий вход ключа 7, причем состояние триггера 4 выбирается так, чтобы U--sign )Тем самым устанавливается оптимальное значение управляющего воздействия на первом интервале движения объекта (участке АВ траектории АВСО, фиг. 2). Поскольку триггер 6 имеет в данном случае фиксированное состояние 0,1, то управляющее воздействие с триггера 4 через ключ 7 поступает на вход объекта управления, вызывая изменение фазовых переменных X,(t) и Х - Значения этих координат как начальные условия поступают в управляемую модель, режим работы которой определяется блоком сброса 14 в зависимости от сигнапов с нуль-органа 10 и блока сравнения 15. Так как начальные состоя ния триггеров 4 и 5 одинаковые, то бпок 1.5 выдает сигнал 1 и бпок сброса 14 вкгаочает модели в режим решение. Управляющее воздействие (j -(j поступает на входы модели через 8 и f, чем обеспечивается его посяюредная передача в зависимости от состояния триггера 6. Поскольку управляющее воздойствиеО/ подается с выхода т-риггера 4, то оно принимает значения - niax траектории, образуемые в результате решения на модели, повторяют оптимальные линии нереключения и исходя- из точек фазовой траектории объекта (фиг.2). При начальном состоянии 0,1 триггера 6 возбужденным оказывается ключ 9 и управляющее воздействие поступает на вход модели, чем обуславливается построение траекторий, повтор5пощих линии переключения LO или LO (фиг.2}. При достижении координатной модепи Х(х))значения, равного нулю, нульорган 10 вырабатывает сигнал, поступаюЕШй на логический элемент 12 и бпок сброса 14. Последний прекращает режим рещение в модели и переводит ее в исходное состояние, при котором текущие значения координат объекта вводятся в модель как начальные условия, после чег модель, ввиду изменившегося состояния нуль-органа 10 и блока сброса 14, вновь включается в режим решение. Этот процесс продолжается цо тех пор, пока не выполняется условие Х (-0)-Х.Р(л)) При ВТОМ фазовая траектория модели совпадает с одной из кривых или LO и сигналы нуль-органов 10 и 11 через элемент И 12 изменяют состояние триггера 6, делая его 1,0. Последний отключает ключи 7 и 8 и включает ключ 9, устанавливая тем самым значение управления на входе объекта ( и подключая вход 9 ускоренной модели. Теперь, в режиме решение управляющее воздействие модели, по-прежнему равное и -Ll , поступает через ключ 9 на вход модели, в результате чего на фазовой плоскости .2 строятся траектории, подобные кривым РО исход5тщие из точек траектории движения объекта ВС (фиг.2). Теперь при выпол 1ении условия ) х {л)0, свидетель 96 ствуюшего о -совпадении фазовой траектории модели с одной из кривых переключеили Р.)О сигнальг с нуль-органов О и 1 1 через элемент И 12 поступают на элемент И 13 и триггер 6. Последний изменяет свое состояние l.O, при котором сигналы нуль-органа 10 через элемент М 1 3 могут поступать на второй () вход триггера 4, изменяя его состояние. Изменение состояниятриггера 4 и 6 в случае приводит к перемене знака управления И; а с другой - к подключению ключей 7 и 8 и отключению ключа О. Тем самым реализуется требуемый опти(лльный алгоритм управления, состоящий как в определении ралейного управления нужног-о знака, так и замене им предыдущего нулевого значения управления. Это обусловливает движение объекта на конечном участке по кривым РО или Р;) О к заданному нулевому состоянию. Поскольку теперь состояния триггеров 4 и 3 не совпадают, блок сравнения 15, реализуя логическую фу 1кцию эквивалентность, имеет на выходе сигнала О, а блок сброса 1-1 отключает модель от периодического режима решенпе, переводя ее в режим задание начальных условий. М, наконец, при достижении регулируемой переменной объекта X.(t) заданного нулевого значения блок 3 отключает ключ 7, чем обеспечивается сохранение заданного конечного состояния объекта. Введение новых элементов - второго и третьего триггера и их соединения с имеющимися элементами - отличает предлагаемое устройство от известного и позволяет Воспроизведением двух линий переключения повысить точность реализации процесса управления неколебатель- ными объектами второго порядка, а также повысить быстродействие устройства управления. Формула изобретенияУстройство для синтеза оптимального управляющего воздействия, содержащее управляемую модель, первый вход которой соединен с блоком сброса, второй и третий входы соединены соответственно с первым и вторым выходами объекта, а выходы соединены соответственно с первым и Вторым нуль-органами, первый, вто-
| название | год | авторы | номер документа |
|---|---|---|---|
| Система оптимального управления объектами второго порядка | 1980 |
|
SU920634A2 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU813359A1 |
| Система оптимального управления объектами второго порядка | 1976 |
|
SU648946A1 |
| УСТРОЙСТВО для СИНТЕЗА ОПТИМАЛЬНЫХ УПРАВЛЯЮЩИХ | 1972 |
|
SU341013A1 |
| Устройство для оптимального управления колебательными объектами второго порядка | 1973 |
|
SU499553A1 |
| Система оптимального управления объектами второго порядка | 1976 |
|
SU643833A1 |
| Система оптимального управления объектами второго порядка | 1981 |
|
SU954934A2 |
| УСТРОЙСТВО для СИНТЕЗА УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ | 1965 |
|
SU171671A1 |
| Система оптимального управления с моделью объектами второго порядка | 1980 |
|
SU888071A1 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU805250A1 |
