1
Изобретение относится к системам автоматического управления и предназначено для оптимального по быстродействию и расходу топлива управления неколебательными динамическими объектами второго порядка с запаздыванием типа летательных аппаратов в химико-технологических процессах.
Известны системы оптимального управления , позволяющие Минимизировать время управления динамическими объектами, которые содержат основной контур управления и контур самонастройки, причем контур самонастройки, содержит настраиваемую модель, блок сравнения, блок самонастройки и исполнительный механизм, а основной контур содержит модель, нуль-орган, блок сравнения, блок управления моделью, триггеры, блок начальныхуставок , сумматор и блок эквивалентность I.
Недостатки этих систем - низкая точность и быстродействие, получение только двухуровневых управляющих СИГНсШОВ.
Наиболее близкой по технической сущности и достигаемому результату к предлагаемому является система оптимального управления объектами второго порядка, содержащая модель объекта, первый вход которой соединен с выходом схемы сброса, второй и третий - с выходами первого и второго ключей, а первый и второй выходы соответственно с входами первого и второго блоков сравнения, выходы которых подклю чены ко входам первого элемента И, соединенного своим вы0ходом с первым входом второго элемента И и счетным входом первого триггера, первый выход которого соединен с управляющими входами первого и третьего ключей, второй выход 5с управляющим входом .второго ключа и со вторьм входом второго элемента и, подключенного входом ко входу первого ключа и второму выходу второго триггера, счетный вход которо0го Соединен с выходом второго элемента И, первый выход - с первым входом блока эквивалентность и через третий ключ - со входом объекта; первый выход которого соединен с
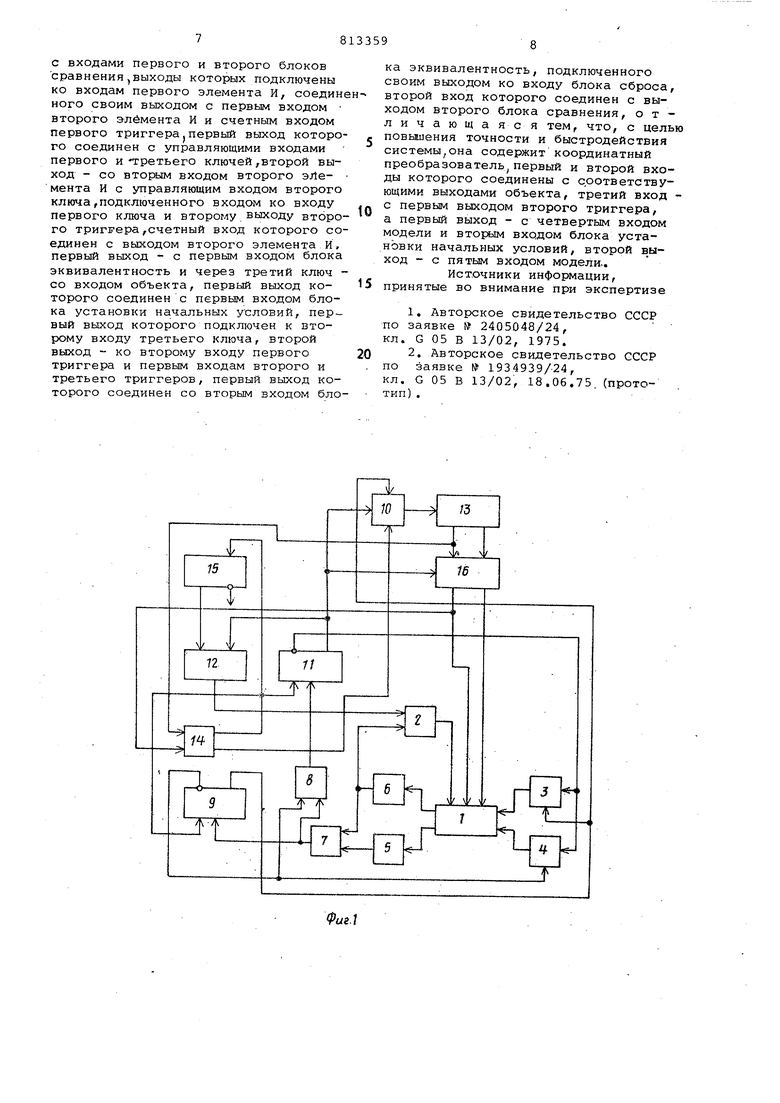
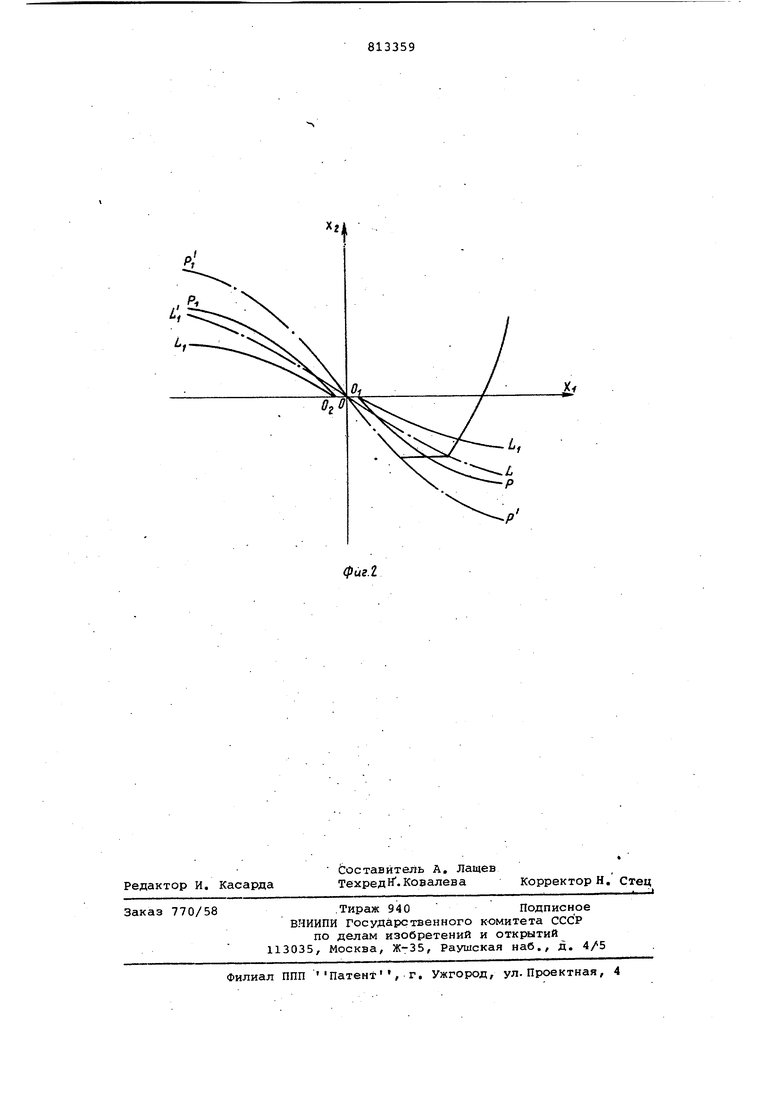
5 первьЕ входом блока установки начальных условий, первый выход которого подключен ко второму входу третьего ключа, второй выход - ко второму входу первого триггера и первьм вхо0дам второго и третьего триггеров. первый, выход которого соединен со вторьом входом блока эквивалентность подключенного своим выходом ко входу блока сброса, второй вход которого соединен с выходом второго блока сравнения 2. , Однако эта система обладает низкими точностью и быстродействием. Цель изобретения - повышение точности и быстродействия системы. Поставленная цель достигается тем что в системе оптимального управления объектам - второго порядка установлен координатный преобраэователь первый и второй входы которого соединены с соотв-зтствующими выходами объекта, третий вход - с первым выходом второго триггера, а первый выход - с четвертым входом модели и вторым входом блока установки началь ных условий, второй выход - с пятым входом модели. Па фиг. 1 представлена блок-схем системы оптимального управления объ ектами второго порядка; на фиг, 2 линии переключепия. Система оптимального управления объектами втброго порядка содержит модель 1 объекта, первый вход которой соединен с выходом блока 2 сбро са, второй и третий входы - с выходами первого 3 и второго 4 клкзчей, а первый и второй выходы - соответственно с вxoдa ад первого 5 и второго 6 блоков сравнения, выходы которых подключены ко входам первого элемента И 7, соединенного своим вы ходом с одни из входов второго эле мента И 8 и счетным входом первого триггера 9. первый выход которого соединен с управлягощими входами пер вого 3 и третьего 10 ключей, второй выход - суправляющим входом второго ключа 4, подключенный входом ко входу первого ключа 3 и второму выходу второго триггеро. II, счетный вход которого соединен с вьзходом вт рого элемента И 8, первый выход - С одним из входов блока 12 эквивален- тность и через третий .ключ 10 - со входом объекта 13, первый выход которого соединен со входом блока установки начальных условий 14,. один иь выходов которогё подключен ко второму входу третьего ключа 10, второй выход ко вторым входам пер вого 9, второго 11 .григгеров и втор му входу третьего триггера 15, первый выход которого соединен со вторым входом блока 12- эквивалентност подключенного своим выходом ко вход блока 2 сброса, второй вход которог соединен с выходом второго блока б сравнения, при этом первый и второй входы координатного преобразовател 16 соединены с соответстаующими вх дами объекта 13, третий вход с пе вым выходом второго триггера 11, а ервый выход - с четвертым входом одели 1 и вторьел входом блока устаовки начальных условий 14, второй ыход - с пятым входом модели. На Фиг. 2 представлены оптимальные о быстродействию и расходу топлива инии переключения , и LOL, ,РОР; - лиия переключения при наличии и отсуттвии запаздывания, в управлении: X(t) и X2.(t) - координаты объекта; . )) и ) - координаты модели. Для релейных неколебательных систем второго порядка оптимальными в смысле криэ:ррия J S (lul+K)dt .,(1) и - управляющее воздействие, ограниченное условием tUl 4 и ,Т -, не Фиксировано, который учитывает расход рабочего тела (топлива) и длительность процесса, будут последовательности управления вида U TicxvP Чг10Х или -UjYiax/- f i-ndty t где ,. - максимальное значение управляющего воздействия. При этом управляющее устройство , синтезирующее опт.имальное управление в функции фазовых перэменных и чистого временного запаздывания в управлении 9 , должно реализовать нелинейный закон управления, определяемый на фазов-ой плоскости управлениями двух линий переключения. Причем, при достижении фазовой точкой первой кривой происходит отклонение управления блока () через Э секунды и имеет место свободное движение системы, а при достижении второй линии переключения, образованной из частей траектории движения системы при значениях управления vnoix и +П,„ау управляющее воздействие через в секунд принимает соответствующее значение, в результате чего даль нейшее движение системы происходит по нулевой траектории в заданное конечное состояние. Для исключения необходимости использования блока постоянного или регулируемого запаздывания, вносящего дополнительную погрешность, в решении целесообразно воспроизводить линию переключения в преобразованных координатах Х ,х; и ,Х, , при этом обе линии переключения в преобразованных координатах оказываются подобны друг другу, отличаясь. лиш.ь коэффициентом К, значение кото.рого постоянно, то оказывается возможным для построения указанных линий 3 преобразованных координатах использовать убыстренную модель объекта. Устройство работает следукяцим образом. Блок 14 установки начальных условий при отклонении значений координаты объекта Х от нулевых производит начальную установку триггеров 9,11 и 15 и подключение ключа 10, причем состояние триггеров 11, 15 определяется так, что U U -Sign Х Тем самым выбирается оптимальное значение управляющего воздействия на первом интервале (участке АВ тра ектории на фиг.2), Поскольку тригге 9имеет в данном случае фиксированное состояние Ъ l, то управляющее воздействие с триггера 11 через клю 10поступает на вход объекта управл ния, вызывая изменение фазовых переменных X(t), X,.,(t), Последние ; через координатный преобразователь 16, принимая значения X(t), Х (t) или х, (t) , (t) (в зависимости от знака Uoj) как начальные условия поступают в ускоренную модель, режим работы которой определяется бло ком 2 сброса в зависимости от сигналов со схемы б совпадения и,логического блока 12 эквивалентность. Так как состояние триггеров 11 и 15 одинаковы, то блок 12 эквивалентность вьщает сигнал l на блок 2 сброса; включает модель 1 в режим Решение, реализующую уравнения динамики объекта в преобразованных координатах с коэффициентом подобия К. при возбуждении ключа 3., На вход поступает управляющее воздействие 0, -U через один из ключей 3 или 4, а при указанном начальном состоянии О, триг гера 9 возбужденным оказывается клю 3 и управляющее воздействие поступа ет на вход модели 1. Ключ 3,4 обеспечивает поочередную подачу управляющего воздействия которое может быть в соответствии со схемным решением либо +UvYiax -и, так как сигнал снимается с выхода триггера управления. При достижении координаты модели Х значения равного нулю вырабатывается сигнал, поступающий на логический блок И 7 и блок 2 сброса. Последняя сбрасывает модель в исходное состояние, при котором текущие значения преобразованных координат объекта Х (t) и X-ji(t) вво дятся в модель как начальные условия. После чего модель, в виду из-, менившегося после введения ненулевых начальных условий состояния бло ка сравнения, вновь включается в режим Решение. Этот процесс продолжается до тех пор, пока .не выполняется условие )X(-i)0. При этом фазовая траектория модели совпадает с одной из кривых L О или L О. и сигналы блоков 5 и б сравнения через, логически блок И 7 изменяют расстояние триггера 9, делая его Ч, О. Послед ний отключает ключи 10 и 3 и включает ключ 5, устанавливая тем самым значение управления на входы объёк-та и б, изменяя вхйд ускоренной модели. Теперь в режиме .Решение управляющее воздействие модели поступает через ключ 4 на вход 3 модели,, в результате чего модель решаетуравнения динамики объекта в преобразованных координатах с коэффициентом подобно и на фазовой плоскости строятся траектории подобные кривым и Р О и Р О, исходящие из точек траектории движения об.ъекта. Теперь при выполнении условия Х (W Х (-) 0, что указывает на совпадение фазовой траектории модели j; одной из кривых переключения рО и Р,0, сигналы блоков 5 и б сравнения через логический элемент И 7 поступают на логический элемент И 8 триггера 9, Последний изменяет свое состояние 1,0, при котором сигналы с блока 7 через блок 8 могут поступать на счетный вход триггера 11 управления объектом, изменяя его состояния. Изменение в данном случае состояния триггеров 9 и 11 приводит, .с одной стороны, к изменению знака управления U и с другой - к подключению ключей 10 и 3, и отключению ключа 4, Тем самым реализуется требуемый оптимальный алгоритм управления,, состоящий как в определении релейного управления нужного знака, так и в замене им предыдущего нулевого управления. Это, обуславливает движение объекта к заданному конечному состоянию . Ввиду различных состояний триггеров. 12 и 15, блок 12, реализующий логическую функцию эквивалентность имеет на выходе сигнал О, и схема сброса отключает модель от периодического режима Решение, переводя в режим Задание начальных условий. При достижении координатой Х(t) заданного нулевого значения схема 14 отключает ключ 10, чем обеспечивается сохранение заданного конечного состояния объекта X., Х О, Результаты исследований, проделанных На макете предлагаемой систе ш оптимального управления показали, что по сравнению с известными системами удалось повысить точность системы управления объектами с запаздыванием на 40% при сохранении быстроействия. изобретения Система оптимального управления бъектами вто.рого порядка, содержаая модель объекта, первый вход коорой соединен с выходом блока сброа, второй к третий входы - с выхоами п-ервого и второго .к.лючей, а ый и второй выходы - соответственно С входами первого и второго блоков сравнения,выходы которых подключены ко входам первого элемента И, соедине ного своим выходом с первьм входом второго элемента И и счетным входом первого триггераJпервый выход которого соединен с управляющими входами первого иТретьего ключей,второй выход - со вторым входом второго эЛемента И с управляющим входом второго ключа,подключенного входом ко входу первого ключа и второму.выходу второ го триггера,счетный вход которого со единен с выходом второго элемента И, первый выход - с первым входом блока эквивалентность и через третий ключ со входом объекта, первый выход которого соединен с первым входом блока установки начальных условий, первый выход которого подключен к второму входу третьего ключа, второй выход - ко второму входу первого триггера и первым входам второго и третьего триггеров, первый выход которого соединен со вторым входом бло ка эквивалентность, подключенного своим выходом ко входу блока сброса, второй вход которого соединен с выходом второго блока сравнения, отличающаяся тем, что, с целью повышения точности и быстродействия системы,она содержит координатный преобразователь первый и второй входы которого соединены с срответствующими выходами объекта, третий вход с первым выходом второго триггера, а первый выход - с четвертым входом модели и вторым входом блока установки начальных условий, второй в ыход - с пятым входом модели,. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР по заявке 2405048/24, кл. G 05 В 13/02, 1975. 2.Авторское свидетельство СССР по заявке № 1934939/-24, кл. G 05 В 13/02, 18.06.75. (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Система оптимального управления объектами второго порядка | 1980 |
|
SU920634A2 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU798704A1 |
| Устройство для синтеза оптимального управляющего воздействия | 1973 |
|
SU657409A1 |
| Система оптимального управления колебательными объектами произвольного порядка | 1983 |
|
SU1092467A1 |
| Система оптимального управления с моделью объектами второго порядка | 1980 |
|
SU888071A1 |
| Устройство для оптимального управления колебательными объектами второго порядка | 1973 |
|
SU499553A1 |
| Система оптимального управления объектами второго порядка | 1976 |
|
SU643833A1 |
| Система оптимального управления объектами второго порядка | 1981 |
|
SU954934A2 |
| Система оптимального управления объектами второго порядка | 1976 |
|
SU648946A1 |
| Устройство управления инерционным объектом | 1988 |
|
SU1755262A1 |
т
