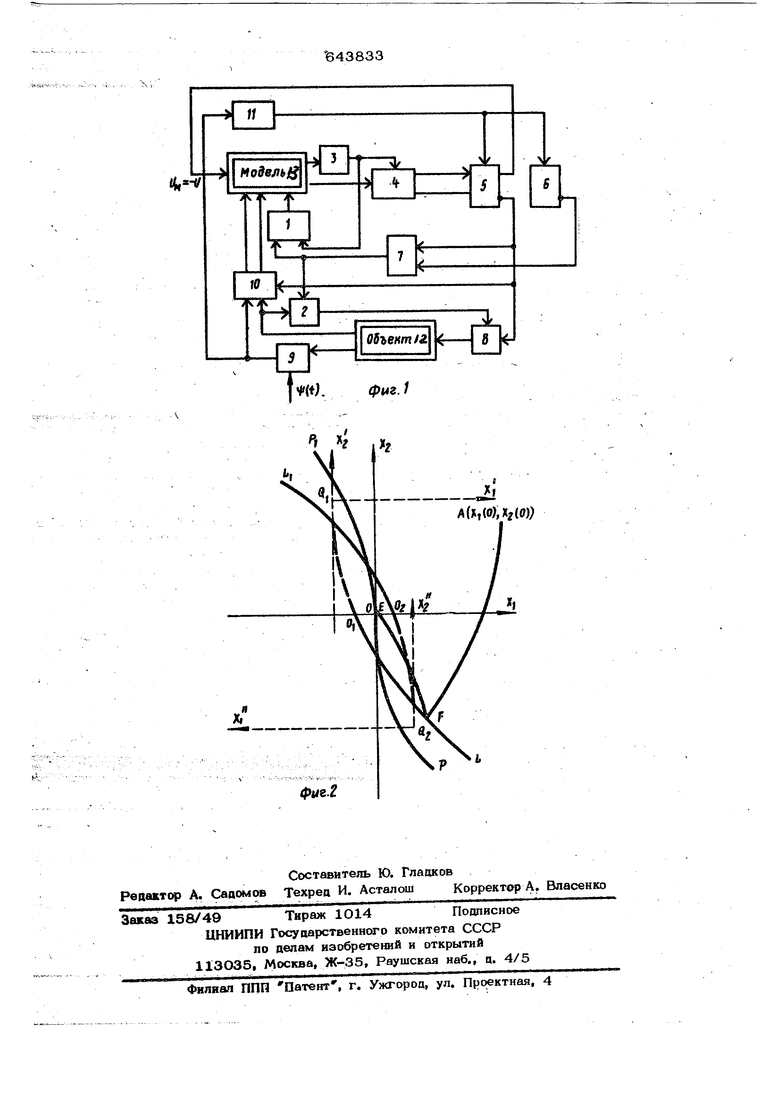
Недостатком такой системы являются ее низкие статическвя точность и быстрооействве. Цель изобретения - повышение стати ческой точности и &дстродейств0я систе Mbi. Поставленная цель постигается тем, что в системе выхоа второго нуль-органа соединен с управляющим входом блок определения знака, выходы которого соединены, соответственно, со вторым и третьим входами первого триггера, .второй выход которого соединен с третьим tixbaoM координатного преобразователя, выходы которого соединены, соответственно.с третьим и четвертым входами модели объекта, первый вход первого ц ль-сфгана соединен с выходом блока эквивалентности, второй вход - с первы выходом объекта, а выход - со-вторым входом ключа. На фиг. 1 представлена блок-схема системы оптимального управления объек тами второго порядка на фиг. 2-оптимальные до быстродействию линии перек лючения. На фиг, 1,2 приняты следующи обозначения: блок управления моделью 1 первый и второй нуль-органы 2 и 3, блок определения знака 4, первый и второй триггеры 5 и 6, блок эквивалентности 7, ключ 8, сумматор 9, координатный преобразователь 10, блок| формировани начальных условий Ц, объект 12, модель объекта 13. UOj 002,U , PjOP линии переключения при наличии и отсут ствии запаздыв&ния в системе соответственно, Ц (-fc ) - сигнал задания. Для оптимизации по быстродействию переходных процессов в динамических системах второго пор1шка с последействием необхоф МО реализовать следующие алгоритмы управления: lI-signP(Xi..)7 где Xi- отклонение выходной координаты объекта, от заданного значения (|1 (Ь )VXj- производИая регулируемой переменной, либо линейная .комбинация производной и самой регулируемой перемеиной объекта; управляющее воздействие, ограш1ченное усл6ви«и|1Г| -Т 1;,да14| эначение чистого временного запаздыва ния в координатеХд.РС Xj, Х,11,С ) функция переключения, определенная кри вой UOjOOjU (фиг. 2). Поскольку кусочно-линейная или кусочно-нелинейная аппроксимация функци переключения сопряжена со значительными погрещностями, то для реализации алгоритма (1) может быть использована модель, многократно и в быстром времени реализующая уравнения движения, объекта. При этом для исключения необходимости использования блока постоянного или регулируемого запаздывания, вносящего дополнительную погрешность в решении, целесообразно воспроизводить моделью траекторию вида i преобразованных координатах х . Хя и ti / i л i 2 В этом случае структура модели идентична объекту, но без последействия, а пе-, риодическое решение производится при начальных условиях, равных преобразованным текущим состояниям объекта Х«(), Хп(Ь) и значении управления модели Совпадение траектории, рассчитанной моделью в преобразованных коороинатах с одной из кривых переключения, приводит к изменению знака управления iTog и движению объекта к заданному конечному состоянию, сохранение которого по окончании переходного процесса обеспечивается упрежденным на время запаздывания отключением управления объекта. Это происходит в том случае, когда изображающая точки объекта достигает отрезка 00 или OOj I что устанавливается выполнением условия X2(t)0. Скачкообразное изменение значения задающего воздействия t(-fc ), поступаю- щего на вход сумматора 9, приводат к появлению на его выходе отключения регулируемой переменной объекта Xj(t/). Согласно знаку X j ) блок формирования начальных условий 11 произвогщт выбор значения управления1Г„на начальном участке движения объекта, что обеспечивается начальной установкой триггера 5. При этом триггер 6 переводится в то же состояние, а блок эквивалентности 7 выдает I на входы блока управления моделью 1 и первый нуль-орган 2. Это вызывает с одной стороны перевод модели объекта 13 в режим периодического решения, с другой - срабатывание ключа 8, чем обеспечивается подача управления -UOB- на вход объекта 12. Текущие значения переменнъ1Х .объекта Xji(t) и ) поступают через координатнъ1Й преобразователь 1О, принимая значения координат Xj(-t ) Х (t ) (или Х ( t ) и t ) в зависимости от знака управления U(jg, как начальные условия в модель объекта 13. Как только координата Х2( ) образуемая в процес се решения моделью обьекта1 13 урав нений движения, принимает нулевое значение, второй нуль-орган 3 вырабатывае сигнал, поступающий на блок управления моделью 1 и блок определения знака 4. При этом последний, определяя знак координаты XT { ), поступающей на его другой вход, возбуждает в зависимости от eigtt X .(о) один из входов триггера 5. И поскольку, до достожения изображающей точкой объекта линии переключения знак координатыХ J ( 9 ) не меняется, то начальное значение управле нияТГдр сохраняется неизменным, В то же время сигнал, поступающий с нульоргана 3 на блок управления моделью 1, вызывает изменения режима работы модели объекта 13, переводя ее в режим задания начальных условий. После чего весь режим рещения повторяется. Это происходит до тех пор, пока при возбуждении нуль-органа 3, блок определения знака 4 не определит изменения знака координаты Х(-Э ) при ) О. Это свидетельствует о прохождении .траектории модели объекта 13 через координат системы Xj Q Х (или Х| QyXj) или о совпадении траектории модели и кривой переключения. При этом триггер 5 изменяет свое состояние, а значит знак управленйяНдр, что определит движе ние объекта по траектории вида РЕ (фиг. 2). Поскольку теперь состояния триггеров 5, 6 не совпадают, то блок эквивалентности 7 посредством блока управления моделью 1 прерывает решение на мо дели объекта 13. Движение объекта 12 при подобном управлении происходит по траектории, обеспечивающей минимальну длительность процесса, а достижение координатой X2(t) нуля обуславливает отключение управления TJog , либо принятие значения, отвечающего заданному конечному состоянию. При этом нуль-орган-2 вырабатывает-сигнал, производящий отключения ключа 8, что вызывает подачу нулевого управления на вход объекта. Наличие связи от блока эквивалентности 7 с нуль-органом 2 исключает возможность отключения управления во всех остальных случаях. Введение новых связей между известными функциональными блокакт позволяет: повысить точность реализации процессе управления объектами второго перядка с запаздыванием; повысить быстродействие устройства управления. Формула изобретения Система оптимального управления объектами второго порядка содержащая первый нуль-орган, координатный преобразоватед,, первый вход которого соединен с первымвыходом объекта, второй выход которого через сумматор соединеа со вторым входом координатного преобразователя и блоком формиро8а1шя начальных условий, выход которего соединен с первыми входами первого н второго триггеров, первый выход первого триггера соединен с первым входом модели объекта, второй выход первого триггера черед ключ соесданен со входом объекта и непосредственно соединен с первым входом блока эквивалентности, второй вход которого соединен с выходом второго триггера, а выход .. с первым входом блока уп-, равления моделью, выход которого соединен со вторым вход(М«1 Модели объекта, первый выход модели объекта соефнен со входом блока определения знака, второй выход модели объекта через второй нульорган соединен со вторым входом блока управления моделью, отличающаяся тем, что, с целью повышения foicTродействия и статической точности системы, в ней выход второго нуль-органа соединен с управляющим входом блока определения знака, выходе которого соединены, соответственно, со вторым и третьим входами первого триггера, второй вътход которого соединен с третьим входом координатного преобразователя, выходы которого соединены, соответственно, с третьим и четвертым входами модели объекта, первый вход первого нуль-органа соещгнен с выходом блока эквивалентности, второй вход - с первъ1м выходом объекта, а выход - со вторым входом ключа. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 161145, Q 06 Q 7/36, 1962, 2.Авторское свидетельство СССР N9 341О13, q D5 В 17/О2, 1971.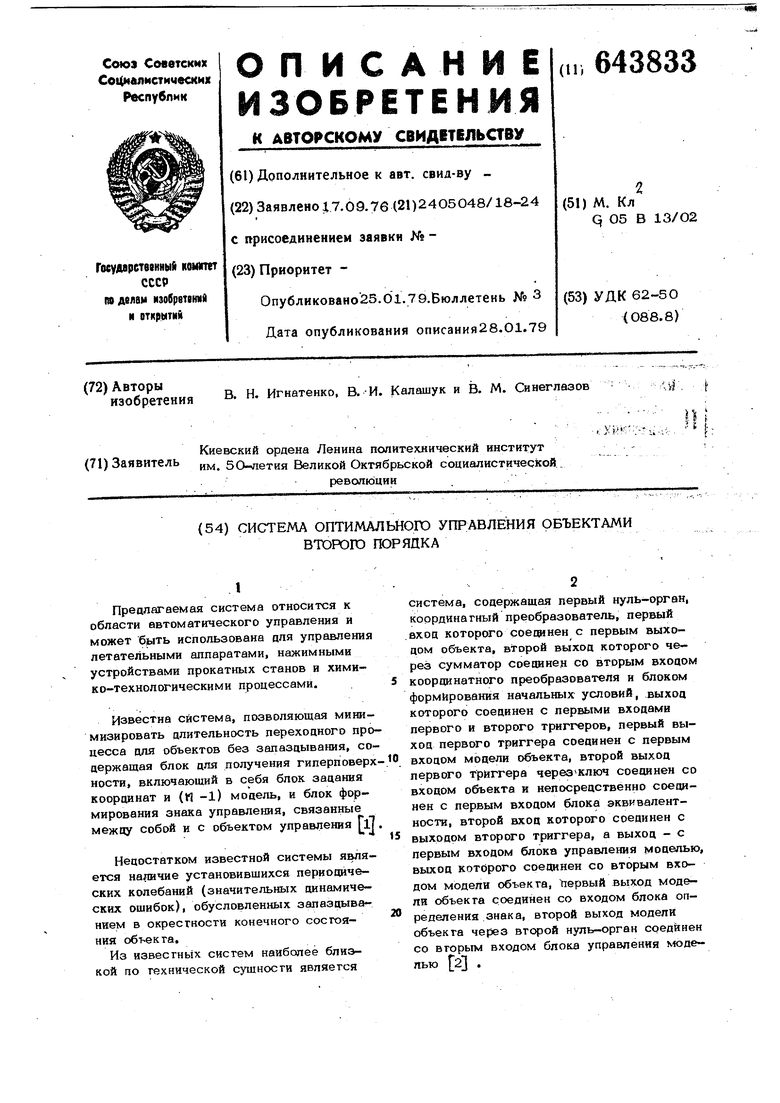
| название | год | авторы | номер документа |
|---|---|---|---|
| Система оптимального управления объектами второго порядка | 1980 |
|
SU920634A2 |
| Устройство для синтеза оптимального управляющего воздействия | 1973 |
|
SU657409A1 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU813359A1 |
| Система оптимального управления объектами второго порядка | 1981 |
|
SU954934A2 |
| Система оптимального управления объектами второго порядка | 1976 |
|
SU648946A1 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU798704A1 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU805250A1 |
| Система оптимального управления с моделью объектами второго порядка | 1980 |
|
SU888071A1 |
| Устройство для оптимального управления колебательными объектами второго порядка | 1973 |
|
SU499553A1 |
| Система оптимального управления колебательными объектами произвольного порядка | 1983 |
|
SU1092467A1 |