(5) СИСТЕМА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ОБЪЕКТАМИ ВТОРОГО ПОРЯДКА
i
Изобретение относиться к системам I автоматического управления и предназначено для оптимального по быстродействию и расходу топлива управления неколебательными динамическими объектами второго порядка с запаздыванием типа летательных аппаратов и химико-технологических процессов.
По основному авт.св. № 813359 известна система, в которой первый вход модели объекта соединен с выходом схемы сброса, второй и третий входы - с выходами первого и второго ключей, а первый и второй выходы соответственно с выходами первого и второго блоков сравнения, выходы которых подключены ко входам первого элемента И, соединенного своим выходом с одним из входов второго элемента И и счетным входом первого триггера, первый выход которого соединен с управляющими входами первого и третьего ключей, второй выход с управляющим входом второго ключа.
подключенного входом ко входу первого ключа и второму выходу второго триггера, счетный вход которого соединен с выходом второго элемента И. первый выход - с одним из входов 1 блока эквивалентность, первым входом первого координатного преобразователя и через третий ключ со входом объекта, второй выход которого соединен с третьим входом, первого координатного преобразователя, подключенного вторым входом к первому входу объекта, входу схемы установки начальных условий, один из выходов которой соединен со входом третьего ключа, второй выход - со вторыми входами первого, второго триггеров и вторым входом третьего триггера, первый выход которого подключен, ко второму входу блока эквивалентность, соединенному своими выходами со входом схемы сброса, второй вход которой подключен к выходу второго блока сравнения 1.
39
Недостатком известной системы является низкая точность.
Целью изобретения является повышение томности системы.
Поставленная цель достигается тем, что в системе оптимального управления объектами второго порядка установлены четвертый, пятый ключи, второй координатный преобразователь, первый вход которого соединен с первым выходом второго триггера, второй и третий входы - -с первым и бторым выходами объекта соответственно, а первый выход, подключенный ко второму входу схемы установки начальных условий и второй выход - соответственно с первыми входами четвертого . и пятого ключей, соединенных своими вторыми входами с первым и вторым выходами объекта, управляющими входами - с первым выходом первого триггера, а выходами - соответственно с четвертым и пятым входами модели объекта.
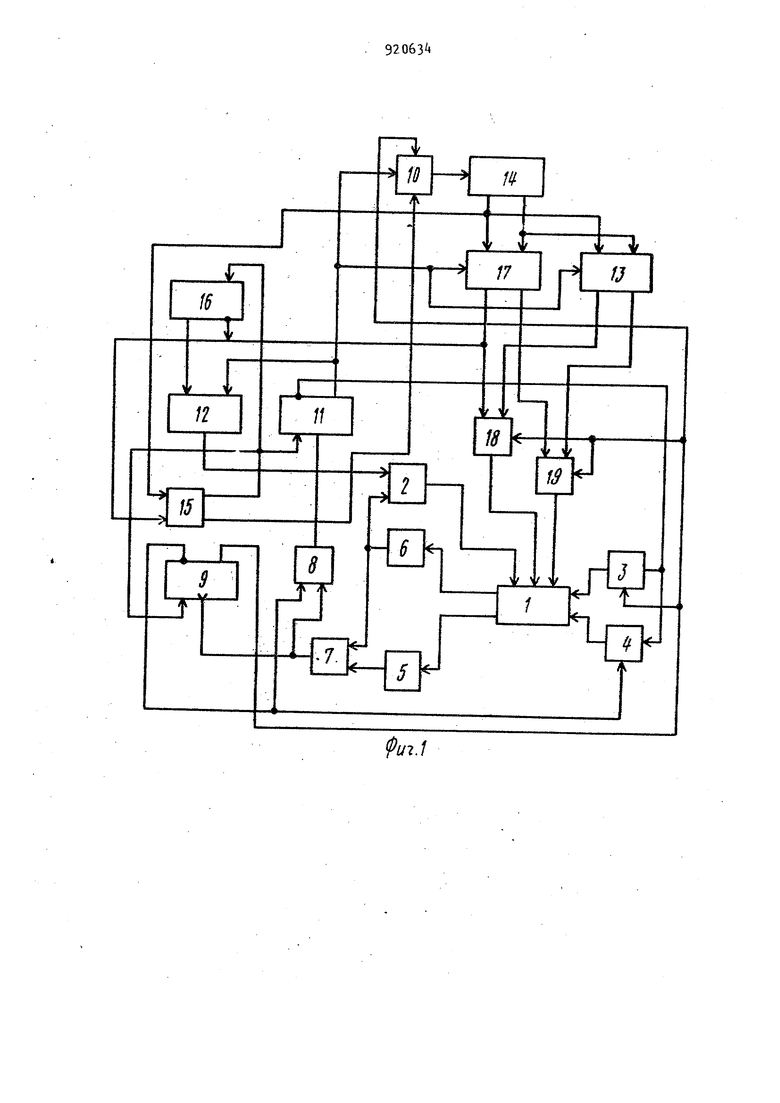
На фиг.1 представлена блок-схема системы оптимального управления объектами второго порядка; на фиг.2оптимальные линии переключения.
Система оптимального управления объектами второго порядка содердит модель объекта 1, первый вход которой соединен с выходом схемы сброса 2, второй и третий входы с выходами первого 3 и второго. ключей, а первый и второй выходы - соответственно с входами первого 5 и второго 6 блоков сравнения, выходы коюрого подключены ко входам первого элемента И 7, соединенного своим выходом с одним из входов второго элемента И 8 и счетным входом первого триггера 9 первый выход которого соединен с управляющими входами первого 3 и третьего 10 ключей, второй выход - с управляющим входом второго ключа 4, подключенного входом ко входу первого ключа 3 и второму выходу второго триггера 11, счетный вход которого соединен с выходом второго элемента И 8, первый выход - с одним из входов блока эквивалентность 12, первым входом первого координатного преобразователя 13 и через третий ключ 10 со входом объекта 1, второй выход которого соединен с третьим входом первого координатного лреобразователя 13, подключенного вторым входом к первому входу объек 4
та 1 it, входу схемы установки начальных условий 15, одним из выходов которой соединен со вторым входом тре-тьего ключа 10, второй выход - со
вторыми входами первого 9, второго 11 триггеров и вторым входом третьего триггера 1б, Первый выход которого подключен ко второму входу блока эквивалентность 12, соединенному своим
выходом со входом схемы сброса 2, второй вход которого подключен к выходу второго блока сравнения 6 при этом первый вход второго координатного преобразователя 17-соединен с
первым выходом второго триггера 11, второй и третий входы - с первым и вторым выходами объекта. соответственно, а первый выход, подключенный ко второму входу схемы установки начальных условий 15, и второй выход - соответственно с первыми входами четвертого 18 и пятого 19 ключей, подключенных своими вторыми входами к первому и второму выходам
объекта Ik, управляющими входами к первому выходу первого триггера 9, а выходами - соответственно к четвертому и пятому входам модели объекта 14.
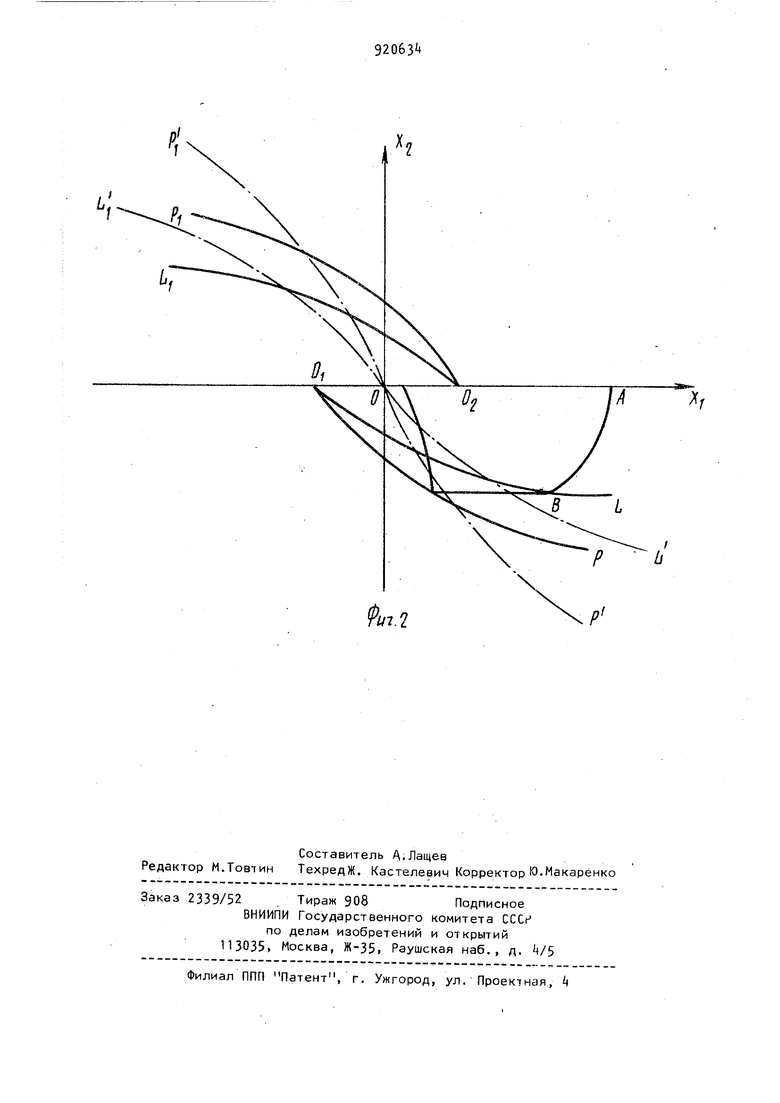
На фиг.2 представлены оптимальные по быстродействию и расходу топлива линии переключения, где приняты следующие обозначения , и LOL, РОР; - линии переключения при наличии и отсутствии запаздывания в управлении, X(t) и XQ(t) - координаты объекта, X() и Хг()) координаты модели.
Для релейных неколебательных сис40тем второго порядка оптимальными, а смысле, критерия т
0( u + K)dt,
где и - управляемое воздействие, ограниченное условием
45
iUU ctxOO Т - не фиксировано,
который учитывает расход рабочего тела (топлива) и длительность процесса, будут последовательности уп равления
IJmax. О, - итацили - ,О,Umdx, где максимальное значение управляющего воздействия. При этом управляющее устройство, синтезирующее
55 оптимальное управление в функции фазовых переменных и чистого временного запаздывания в координатах должно реализовать нелинейный закон управления, определяемый на фазовой плоскости уравнениями двух линий пе реключения. При этом для исключения необходимости использования блока постоянного или регулируемого.запаз дывания, носящего дополнительную погрешность в решении, целесообразно воспроизводить линии переключения в преобразованных координатах соответственно для первой кривой , и Х,Х, )C;xi для второй. При этом обе линии переключения в преобразованных координатах оказываются подобны друг другу,отличаясь лишь коэффициентом К,значение которого постоянно, то оказывается возможным для построения указанных линий в преобразованных координатах использовать модель, многократно и в быстром времени реализующую ура нение движения объекта. Устройство функционирует следующим образом. Схема установки начальных условий 15 при от ключении значений коор динаты X.|(t) от нулевых производит начальную установку триггеров 9 П и 16 и подключение ключа 10,причем состояние триггеров 11 и 16 определяется так, что и . Тем самым выбирается оптимальное значение управляющего воздействие на пер вом интервале (участке АВ траектори фиг.21. Поскольку триггер 9 имеет в данном случае фиксированное состоя ние О, 1,. то ключи 18 и 19 открыты для прохождения сигналов с координатного преобразователя 13 а управляющее воздействие с триггера 11 через ключ 10 поступает на вход объекта управления, вызывая изменение фазовых переменных X(t)-,X(2(t5 . Последние через координатный пре образователь 13, принимая значения X(-t), (или ), XjtU в зависимости от знака Uj)5 } , ключи 18 и 19 как начальные условия поступают в ускоренную модель, режим работы которой определяется схемой сброса2 в зависимости от сигналов с блока сравнения 6 и логического блока экви валентность 12. Так как состояние триггеров 11 и 16 одинаковы, то блок эквивалентность 12 выдает сигнал 1 и. схема сброса 2 включает модель 1 в режим Решение, реализующую уравнения намики объекта в преобразованных координатах с коэффициентом подобия К (ПРИ возбужденной ключе 3- На вход модели поступает управляющее воздействиеи -и через один из ключей 3 или k, а при указанном начальном г состоянии 0,1 триггеры 9 возбужденным оказывается ключ 3 и управляющее воздействие поступает на вход модели 1. Ключи 3 и обеспечивают поочередную подачу управляющего воздействия U, которое может быть, в соответствии со схемным решением либо +Un(ixj либо - Urncix так как си|- нал снимается с выхода триггера управления. При достижении координаты модели Х значения равного нуля блок сравнения 6 вырабатывает сигнал, поступающий на логический блок И 7 и схему сброса 6. Последняя сбрасывает модель в исходное состояние, при котором текущие знамения преобразованных координат объекта вводятся в модель как начальные условия. После чего модель, ввиду изменившегося после введения ненулевых начальных условий состояния блока сравнения 6, а значит и 2, вновь включается в режим Решение. Этот процесс продолжается до тех пор, пока не выполнится условие Х л) 0. При этом фазовая траектория модели совпадает с одной из кривых L, О или LO и сигналы блоков сравнения 5 и 6 через логический И 7 изменяют состояние три| гера 9 делая его Т,О. Последний отключает ключи 10 и 3, открывает ключи 18 и 19 для прохождения си| налов с координатного преобразователя 17, включает ключ 4; устанавливая тем самым знамение управления на входе объектаиы 0 и изменяя вход ускорений модели. Теперь в режиме Решение управляющее воздействие модели, по-прежнему равное ,поступает через ключ Ц на вход модели, в результате чего модель решает, уравнения динамики объекта в преобразованных координатах с коэффициентом подобия и на фазовой плоскости строятся траектории, подобные кривум РО и PJ, О и исходящие иЗ точек траектории движения объекта. При выполнении условия Х(0) X5(i)0, что указывает на совпадение азовой траектории модели с одной из 7 кривых переключения РО и р,о, сигналы с блоков сравнения 5 и 6 через логический блок И 7 поступают на логический блок .И 8 и счетный вход триггера 9- Последний изменяетсвое состояние 1,0 при котором сигналы с блока 7 через блок 8 могут поступать на счетный вход триггера управления объектом 11, изменяя его состояние. Изменение в данном случае состояния триггеров 9 и 11 приводит к изменению знака управляющего возлействия k. Тем самым реализуется требуеА-1Ый оптимальный алгоритм управления, состоящий как в определении релейного управления нужного зна ка, так и замене им предыдущего нуле вого управления. Ввиду различных состояний триггеров 11 и 16, блок 12 реализующий логическую функцию эквивалентность, имеет на выходе сигнал О, и схема сброса откпючает модель от периодического режима Решение, переводя режим Задание начальных условий. Наконец при достижении преобразова ной координатой Х XJ, заданного ну левого значения схемы 15 отключает ключ 10, что соответствует упрежден ному на время запаздывания отключен управления объекта, обеспечивающему сохранение сколь угодно долго задан ного конечного состояния . Результаты исследований, продела ных на макете предлагаемой системы. оказали, что по сравнению с известым удалось повысить точность реалиации процесса управления на 20%, Формула изобретения Система оптимального управления оиъектами второго порядка по авт.св. № 813359, отличающаяся тем, что, с целью повышения точности системы, в ней установлены четвертый, пятый ключи, второй координатный преобразователь, первый вход которого соединен с первым выходом второго триггера, второй и третий входы - с первым и вторым выходами объекта соответственно, а первый выход, подключенный к второму входу схемы установки начальных условий, и второй выход - соответственно с первыми входами четвертого и пятого ключей, соединенных своими вторыми входами с первым и вторым выходами объекта, управляющими входами - с первым выходом первого триггера, а выходами - соответственно - с четвертым и пятым входами модели объекта, Источники информации, принятые во внимание при экспертизе 1, Авторское свидетельство СССР №813359, кл, 05 В 13/02, 1980 (прототип) .
i./
| название | год | авторы | номер документа |
|---|---|---|---|
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU813359A1 |
| Устройство для оптимального управления колебательными объектами второго порядка | 1973 |
|
SU499553A1 |
| Система оптимального управления колебательными объектами произвольного порядка | 1983 |
|
SU1092467A1 |
| Система оптимального управления объектами второго порядка | 1976 |
|
SU643833A1 |
| УСТРОЙСТВО для СИНТЕЗА ОПТИМАЛЬНЫХ УПРАВЛЯЮЩИХ | 1972 |
|
SU341013A1 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU805250A1 |
| Система оптимального управления с моделью объектами второго порядка | 1980 |
|
SU888071A1 |
| Система оптимального управления объектами второго порядка | 1981 |
|
SU954934A2 |
| Устройство для синтеза оптимального управляющего воздействия | 1973 |
|
SU657409A1 |
| Устройство для контроля средств числового программного управления | 1988 |
|
SU1675852A1 |