(54) УСТРОЙСТВО ДЛЯ ОТДЕЛОЧНОЙ ОБРАБОТКИ ИЗДЕЛИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАН ХОЛОДНОЙ ПРОКАТКИ ТРУБ | 2009 |
|
RU2385779C1 |
| Клепальный станок | 1975 |
|
SU526432A1 |
| СТАН ХОЛОДНОЙ ПРОКАТКИ ТРУБ | 2002 |
|
RU2220795C1 |
| Устройство для испытания на износоустойчивость элементов электрического соединения | 1989 |
|
SU1696963A1 |
| РАБОЧАЯ ЛИНИЯ СТАНА ХОЛОДНОЙ ПРОКАТКИ ТРУБ | 2005 |
|
RU2286221C1 |
| Автомат для высадки | 1974 |
|
SU512845A1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В ТАРУ | 2006 |
|
RU2313478C1 |
| Механический пресс | 1977 |
|
SU745705A1 |
| СТАНОК ДЛЯ ОБРАБОТКИ КИРПИЧА | 2001 |
|
RU2193967C1 |
| МЕХАНИЧЕСКИЙ ПРЕСС ДЛЯ ПОЛУСУХОГО ФОРМОВАНИЯ СЫРЦА КИРПИЧА | 1998 |
|
RU2151693C1 |
1
Изобретение относится к станкостроению ; и предназначено для отделочной обработки изделий, нащ1имер для полирования столовых прибороЬ.
Известен станок для отделочной обрабо-рки поверхностей столовых приборов, выпол, ненный в виде станины и совершающей возI вратно-поступательное движение опорной раi мы с приводом.
-10
Однако в известном станке при обработi ке поверхностей сложной формы, состоящих, ; например, из поверхностей разной кривизны или из криволинейной и прямолинейной поверхностей, ось кассеты с изделиями движет 4б ся по сложной траектории. Причем движение оси кассеты создается от разных зфиводов. В этo. случае не обеспечивается точная траектория оси кассеты относительно рабочих валков; корректировка траектории оси . 20
; кассеты осуществляется за счет деформации геометрической формы изделия вследствие возникающетп дополнительнотО сопро-; тивления движен 1Ю между издя.чием и рабо. чими вaлкa.1и. эти нопостатки 1триводят 25
к сужению технолот ических возможностей станка и увеличивают износ рабочих валков. Предлагаемое устройство отличав.оя от. известного тем, что оно снабжено совершающим 1БОЗВратно-постУпательное движение от привода опорной рамы через кривошипно-шатунный механизм кулаком, взаимодействующим св,р- им фигурным пазом со станиной и установленным на оси в корпусе, поступательно перемещающемся в направляющих станинах и соединенном посредством шарнирно-рычажного четьфехзвенника с опорной рамой, из рычагов которой жестко связан о кулаком.
Рычаг, связанный с кулаком, выполнен в виде ступицы и планки, регул1фуемой в , угловом направлении относительно стртицы.
На станине предусмотрен зажим, фиксирующий направляющие подвижного корпуса относительно привода.
Кроме того, устуюйство отличает(:;я тем, что в подвижном корпусе предусмотрен па- лец, фиксирующий кулак в Т1)ебуемом положении.
Такое выполнение устройства позволяет расширить его . технологические вшэможности при отделочной: обработке изделий.
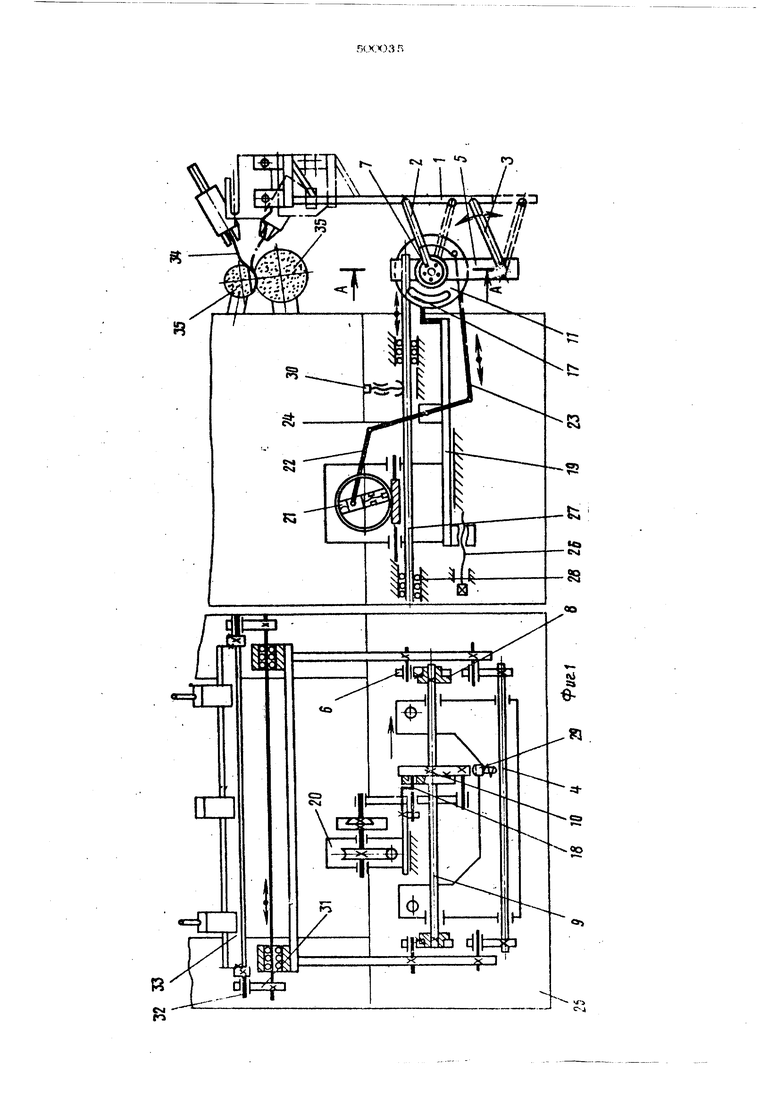
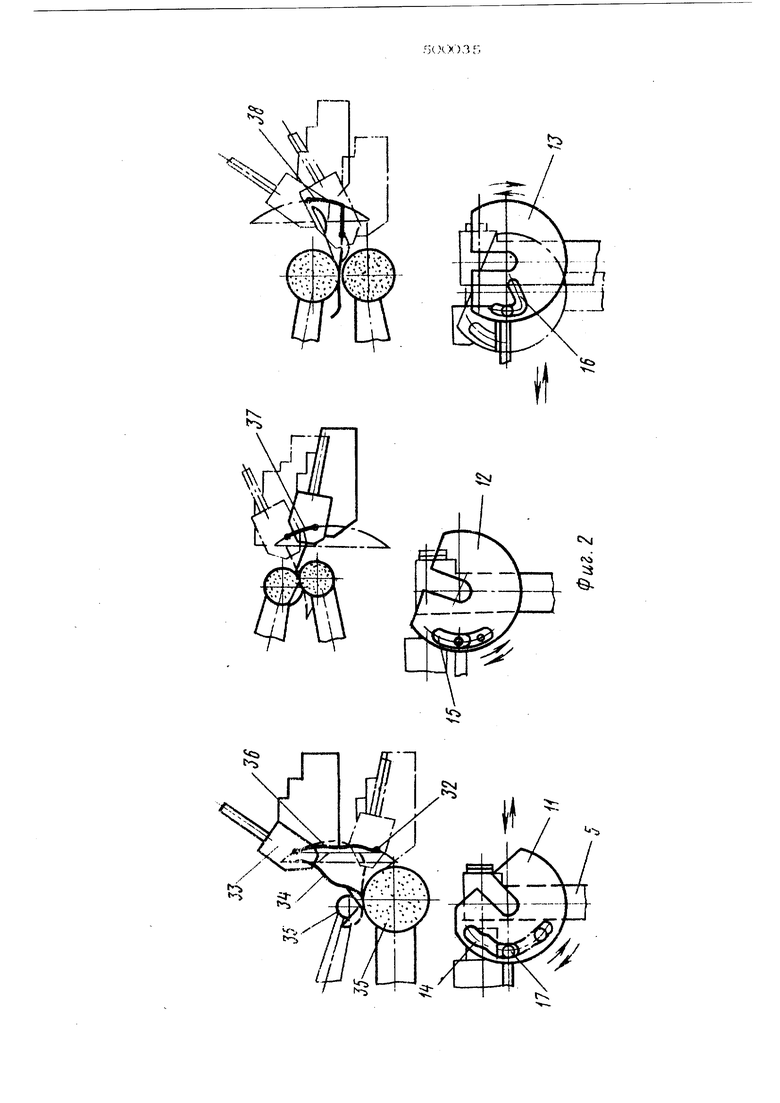
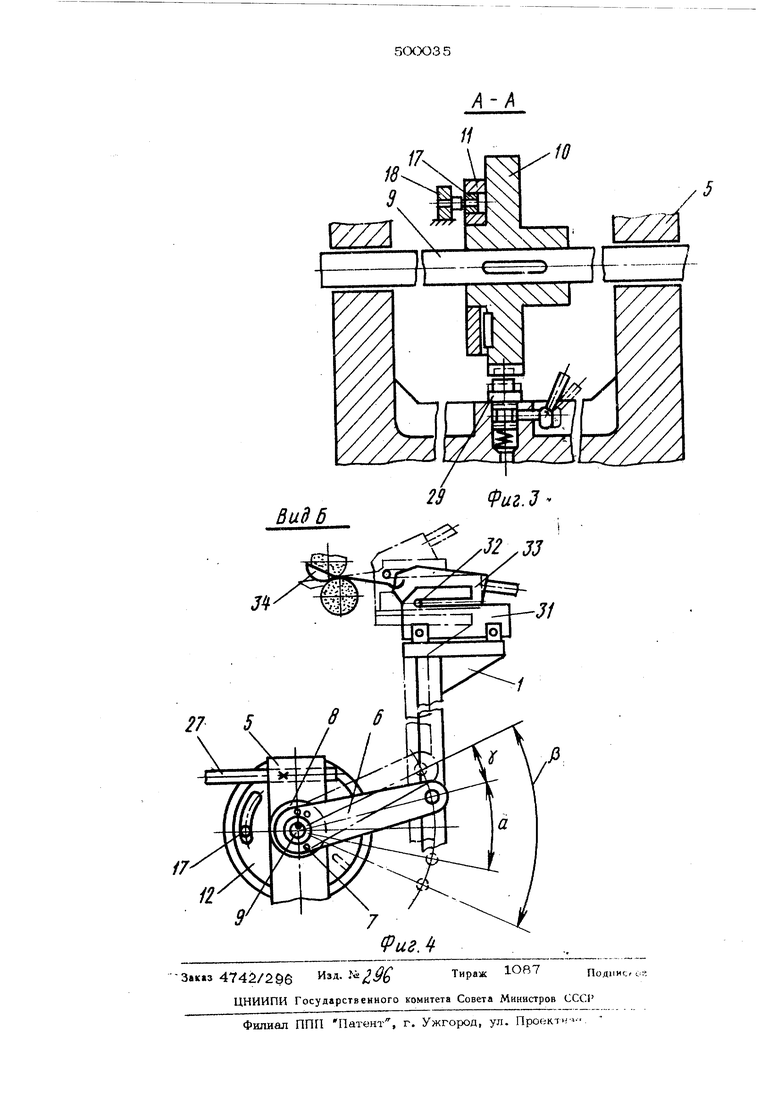
На фиг. 1 изображена кинематическая схема устройства и смежных узлов станка, вид спереди и сбоку; на фиг. 2 - траёкто -; рия оси кассеты и форма паза кулака для поверхности, образованной двумя дугами зрвзных раяяуевв - Й дл-ff-лвверхййсти, образованной дугой одного радиуса (S}, для поверхности, образованной кривой и прямой линиями ( ); не фиг. 3 - сечение по А-А на фиг. 1; Hfe фиг. 4 - вид по стрел ке Б на рычаг с опорной рамой при разных положениях оси касеты. Устройство является составной частью стайка для отделочной обработки изделий. Устройство включает опорную раму 1, которая шарнирно связана с рычагами 2 и 3.Рычаги 3 жестко связаны с нижней осью 4,установленной в подвижном корпусе 5. Рычаги 2 выполненыв виде планок 6 с от верстиями 7 для крепления со ступицами 8, которые жестко связаны с Верхней осью 9, установленной в подвижном корпусе 5(фиг. 1 и 4). Опорная рама 1, рычаги 2 и 3 образуют шарнирно-рычажный четьфехзвенник. На оси 9 установлена ступица 10, на которой закреплен в определенном положении кулак 11 (12 или 13) с фигурным пазом 14 (15 или 16). В фигурный паз 14 (15 или 16) входит ролик 17, установленный на оси кронштейна 18, который жестко связан с основанием 19 привода 20 опорной рамы 1. Привод 20 шарнирно связан через кривошипно-шатунный механизм, который состоит .из кривошипного пальца 21 с регулируемым эксцентриситетом, шатунов 22 т 23 ч коромысла 24, со ст -личей 1О кулака 11. Основание 19 с приводом 20 установлено на станине 25 и жестко фиксируется на ней. Станина 25 снабжена наладочным yct ройством 26, например парой винт-гайка, для перемещения и фиксации привода 2О. В подвижном корпусе 5 закреплены направляющие 27s которые установлены с ним в направляющих 28 станины 25. В корпус5 вставлен палец 29, вдвигае- мый в паз ступицы .10 кулака 11 и фиксирующий его относительно корпуса 5i На станине 25 установлен зажим 30, который фиксирует направляющие 27 подвиж наго корпуса 5 относительно привода 20, На опорной раме 1 размещена каретка 3 в пазах которой фиксируются оси 32 кассе ты 33 с изделиями 34, установленными в
исходном положении между рабочими валками 35.
Обработка поверхности изделий 34 начинается после наладки на заданную операцию. Обработка производится в полуавтоматическом цикле.
Исходное положение оси 32 кассеты 33 относительно осей рабочих валков 35 в готризонтальной плоскости устанавливается
перемещением основания 19 о приводом 20, подвижного корпуса 5 с опорной рамой 1 и кулаком 11 (12 или 13) относительно станины 25 при помощи регулировочного устройства 26. Исходное положение оси 32 относительно осей рабочих валков 35 по высоте устанавливается поворотом планки 6 относительно ступиды 8 на необходимый угол - . Угол; поворота Q или (фиг. 4) рычагов 2 и 3 достигается регулировкой эксцентриситета кривошипного пальца 21. Крайние положения изделия 34 при обработке должны соответ ствовать крайним - точкам траектории 36 (37 или 38) оои 32, определяемой формой ф„рур„ого паза 14 (15 пли 16), которая фигурного паза 14 (15 пли 16), которая зависит от формы обрабатываемой поверхности (фиг. 2). Исходное положение оси 32 всегда находится на дуге с радиусом, равным иежцентровому расстоянию отверстий рычагов 2 и 3. В общем случае обработки поверхности изделия 34, образованной двумя или несколькими дугами разной кривизны, например чашеобразная поверхность ложки, траектория 36 оси 32 кассеты 33 и рабочая подача язделия 34 между рабочими валками 35 в плоскости, перпендикулярной осям валков. . определяются сложением двух движений ; возвратно-поворотного движения шарнирно-рычажного четьфехзвенника опорной рамы 1 и возвратно-поступательного движения корпуса 5с кулаком 11, жестко связанным с РЫчагами 3 шарнирно-рычажного четьфехавенника, зависящих от формы фигурного паза 14 кулака 11 (фиг. 2,а). После установки изделия 34 в исходное положение верхний валок 35 прижимает его к нижнему валу с постоянным усилием, Последующая команда включает привод 20, который через кривошипно-шатунный механизм поворачивает кулак 11 и вместе с ним шарнирно-рычажный четьфехзвенник опорной рамы 1 и-ось 32 кассеты 33 по дуге на угол ( или , Одновременно кулак 11, взаимодействуя своим фигурным пазом 14 с нeпoдвE iшы роликом 17, движется поступательно вместе lie корпусом 5 и опорной paMOvi 1 и принудитачь-, но коррекпфуег дуговую Т11аекторию оси 32 чсоответственно форме паза 14. При этом рабЬчая подача изделия 34 осуществляется с постоянным равномерным контактом его поверхности с .рабочими валками 35. При обработке поверхности, образованной дугой одного радиуса,траектория 37 оси 32 имеет форму дуги одного радиуса и в зависимости от радиуса фигурного паза 15 (фиг. 2,6) определяется сложением двух Движений, как и в общем случае. В частном случае, когда радиус дуги ттраектирии 37 оси 32 равен межцентровому расстоянию отверстий рычагов 2 и 3, траек тория 37 определяется только поворотным движением опорной рамы 1. В этом пример направляющие 27 с KOI пусом 5 и кулаком 12 фиксируются относительно привода 20 зажимом 30. Обработка прямолинейной поверхности изделия 34 осуществляется только при возвратно-поступа тельном движении корпуса 5 с кулаком и опорной рамой 1 от привода 20, который посредством кривощипно-шатунного механизма связан со ступицей 10 кулака. Для фиксации кулака и, следовательно, шарнирно-рычажного четьгрехзвенника опорной рамы I от проворота в паз ступицы 10 кулака вдвигается палец 29. При обработке поверхности, образованной криволинейным и прямолинейным участ ками, траектория 38 оси 32 определяется формой паза 16 кулпкп 13 (фиг. 2,в). В том примере криволинейный участок траек- тории 38 определяется сложением двух движений, как в общем случае, и соответхзпвует криволинейному участку паза 16. Прямолинейный участок траектории 38 срответ- ствует прямолинейному участку паза 16, направленному радиально .к центру кулака 13 При повороте кулака 13 щ-) ям о линейный участок паза 16 рашолагается параллельно направляющим 9 подвижного корпуса 5 и неподвижный ролик 17, взаимодействуя с пазом 16 при дальнейшем поступательном движении корпуса 5 с кулаком,. 13, фикси ; рует последний от поворота. Формула изобретения 1.Устройство для отделочной обрабс ки .изделий, например столовых Тфиборов, вы- ; полненное в виде станины и совершающей возвратно-поступательное движение опорной рамы с приводом отличающееся тем, что, с целью расширения технологяче -оких возможностей, оно снабжено совершающим возвратно-поворотное движение от при- вода опорной рамы через кривошипно-чгатун ный механизм кулаком, взаимодействующим своим фигурным пазом состаниной и установленным на оси в корпусе, поступательно перемещающемся в направляющих и соединенном посредством шарн1фно-рычажного четырехзвенника с опорной рамой, один из рычагов которого жестко связан с кулаком, 2.Устройство по п 1, о т л и ч я ющ е е с я тем, что рычаг, связанный о 1 кулаком,,- вьшолнен в виде ступицы и планки, регулируемой в угловом направлении, относительно ступицы. 3. Устройство по ЦП. 1, 2, о т л и- чающееся тем, что на станине пре- дусмотрен зажим, фиксирующий направляю- шие подвижного корпуса относительно привода, 4. Устройство по тт. 1, 2 и 3, обличающееся Ч-ем, что в подвижном корпусе предусмотрен палец, фиксирующий кулак в требуемом положении.
- )
Ov .Ill/ .
о
Ss
«Nl
Na ij
