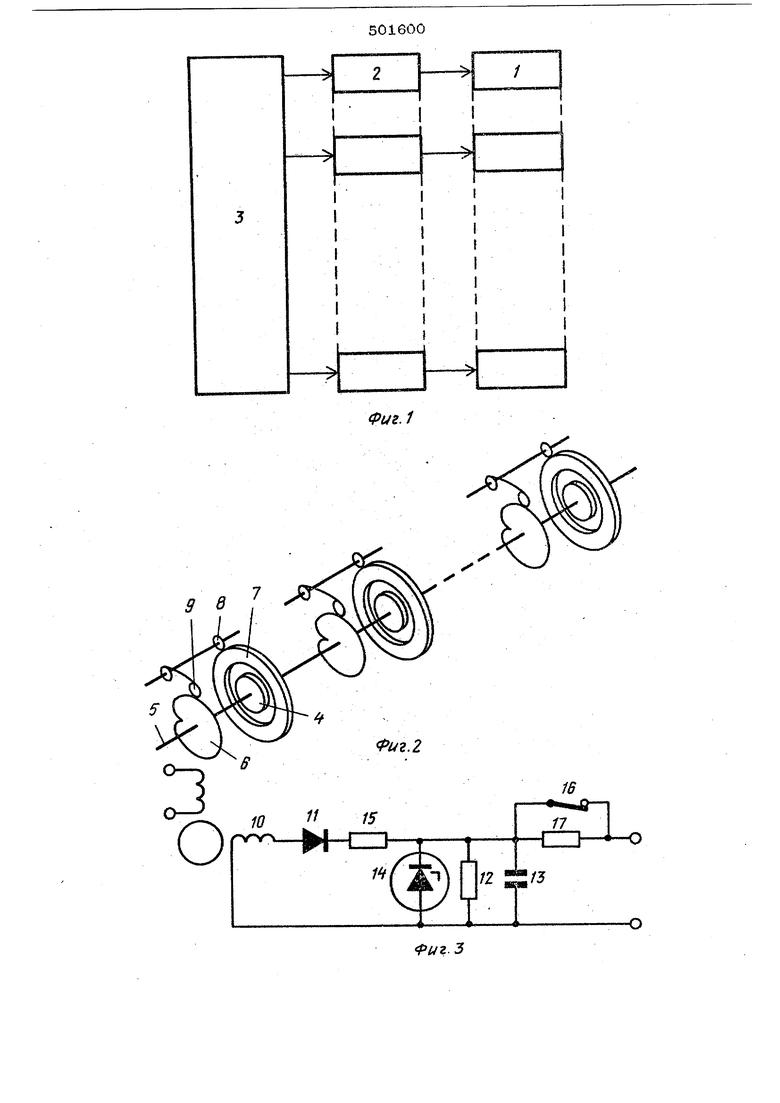
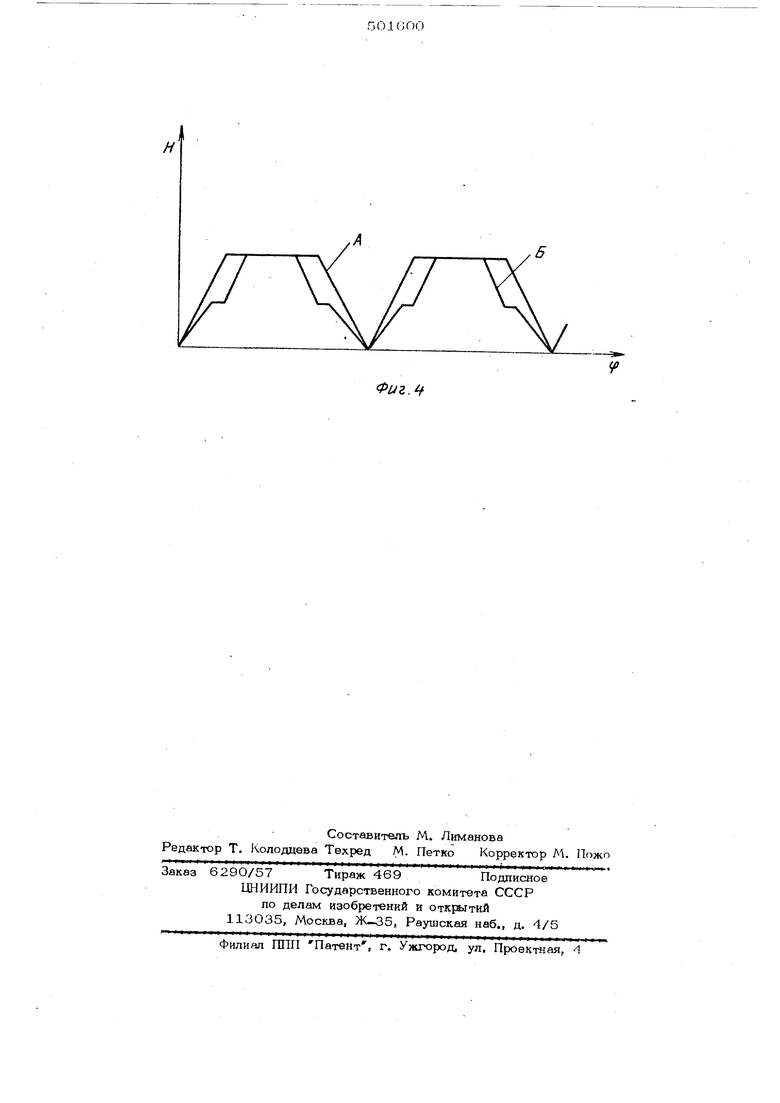
Изобретение относится к трикотажному производству, а именно к устройству для управления многосистемной кругловязальной машиной, содержащей игольницу, набранную вязальными иглами и игловодами, и кольцевые кглоперемещагошие устройства, каждое из которых связано с авт-одомным гидроприводом. Известно устройство для управления многоснстемной кругловязальной машшюй, которое имеет следящие системы и программный механизм, при этом траектория движения игл в петлеобразуюшем устройст ве с трудом поддается изменению. С целью получения произвольной траектории игл предлагаемое устройство управления снабжено формирующим устройством и группой линейных индукционных датчиков угла по числу иглоперемешаюших уст ройств. Роторы датчиков угла расположе- ны ла одной оси и электрически разверну тч один относительно другого для обаспе- ч«зния необходимого сдвига фаз. Ойи кинематически связаны с игчзльницей для синхронного с ней вращения. Выходы датчиков соединены через формирующие устройства со следящими системами, а статоры датчиков установлены подвижно и через кулачковые механизмы машины связаны со своими роторами. На фиг. 1 представлена блок-схема привода иглоперемещаюших устройств ма шины; не фиг. 2 - кинематическая схема предлагаемого устройства для управления многосистемной кругловязальной машиной на фиг. 3 - электрическая схема формирующего устройства; на фиг. 4 - кривые зависимости высоты Н подъема ргл от угла Ц) поворота нитеводителя при юс относительном движении. Каждое из иглоперемещаюших устройств 1 машины соединено с гидравлическим пр19водом следящих систем 2. Ко входам следящих систем подключено предлагаемое устройство- 3 для управления машиной. Устройство для управления машиной снабжено группой линейных индукционных датчиков угла, роторы 4 которых располо- жены на одной оси 5 с кулачковыми ханизмами 6 машипаы. Ось через систему передач соединена с игольницей. Статоры 7 датчиков подвижно установлены на станине машины и через шестерни 8, щуп 9 и кулачковые механизмы 6 связаны со своими роторами. Роторы и кулачковые механизмы электрически развернуты один относительно другого на определенный угол. Все кулачки имеют одинаковый про филь. На выходе каждого датчика 1U установлено формирующее устройство (см. фиг. 3), которое состоит из выпрямителя на диоде 11, сопротивления 12, конденсатора 13, ограничителя на стабилитроне 14 и сопротивления 15. При размыкании контакта 16, шунтирующего сопротивление 17, изменяется коэффициент передачи формирующего устройства, чем достигается полуподъем игл. Предлагаемое устройство работает следующим образом. При включении машины роторы датчиков угла вращаются синхронно с игольницей, чем достигается временная синхронизация поступления управляющих сигналов на входы следящих систем. Линейные индукционные датчики угла являются задающими генераторами входного сигнала линейных электрогидронриводов. Напряжение на выходе на линейном участке изменяется линейно при линейном изменении угла поворота ротора. При жестком закреплении статоров сигналы на вхо дах электрогидравлических следящих систем имеет форму, в определенном масштабе повторяющую форму траектории А. Дополнительное вращение статора о.т кулачкового Механизма 6 и щупа 9 через шестерню 8 приводит к. неравномерному вращению ротора относительно статора. При этом огибающая выходного сигнала датчика в точности повторяет во времень закон изменения угла ф поворота рото- ра. Выбором соответствующе1Ч) профиля кулачкового механизма Э можно получить желаемую форму траектории, например траекторию Б с ярко выраженными нелинейностями. Благодаря наличию сдвига пи фазе в управляющих сигналах иглоперемещающие устройства движутся возвратно-поступательно поочередно, с некоторым перекрытием по времени, создавая бегущую волну. Величину фазовохх) .сдвига оС определяют по формуле где Д4|7 - размер одной игольной системы в угловых единицах; л - число гидроприводов. Форма траектории не искажается при неравномерном вращении ихольницы, а также при полном останове , так как высоте подъема иглоперемещающих устройств зависит только от угла поворота игольницы, но не от времени разворота на этот угол. Формула изобретения Устройство для управления многосистем- (НОЙ кругловязальной машиной, содержащее следящие системы и программный механизм, отличающееся тем, что,, с целью получения произвольной траектории игл, оно снабжено формирующими устройствами и группой линейных индукционных датчиков угла, роторы которых электрически развернуты один относительно другого для обеспечения необходимого сдвига фаз и кинематически связаны с игольницей, при этом выходы датчиков соединены через формирующие устройства со следящими системами, а статоры датчиков установлены подвижно и через кулачковые механизмы машины связаны со своими роторами.
I
1
| название | год | авторы | номер документа |
|---|---|---|---|
| Многосистемная кругловязальная машина | 1971 |
|
SU501601A1 |
| Многосистемная двухфонтурная кругловязальная машина | 1971 |
|
SU501598A1 |
| Многосистемная кругловязальная двухфонтурная машина | 1975 |
|
SU767249A1 |
| Устройство управления групповой трикотажно-вязальных машин | 1971 |
|
SU501602A1 |
| Многосистемная плосковязальная мшина для выработки кулирного трикотажа | 1976 |
|
SU653316A1 |
| Вязальный механизм кругловязальной машины | 1977 |
|
SU740878A1 |
| ОПТИКОЭЛЕКТРОННЫЙ СЛЕДЯЩИЙ КООРДИНАТОР | 1996 |
|
RU2101724C1 |
| Кругловязальная многосистемная машина | 1971 |
|
SU557613A1 |
| Многосистемная круговязальная машина | 1974 |
|
SU504388A1 |
| СПОСОБ ОБРАЗОВАНИЯ НАЧАЛЬНЫХ ПЕТЕЛЬНЫХ РЯДОВ ИЗДЕЛИЯ | 1991 |
|
RU2041991C1 |
9 в 10 1
I
Фиг.1
.3 //г.2 15
Фиг.
