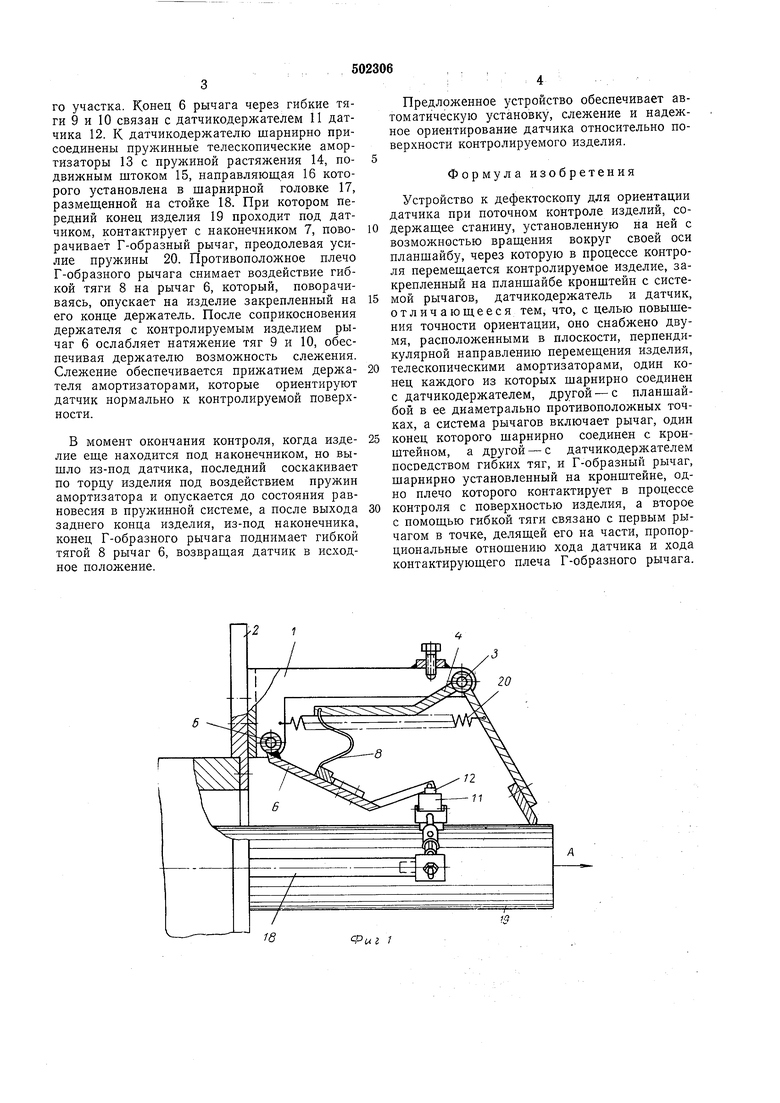
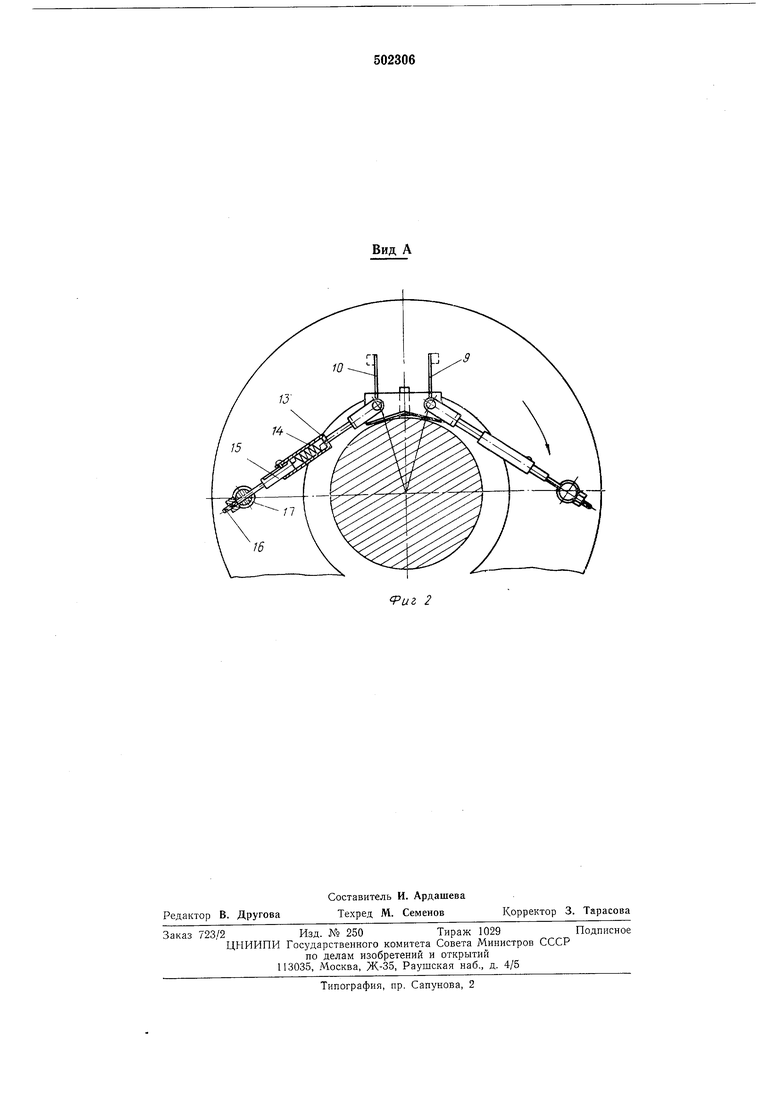
го участка. Конец 6 рычага через гибкие тяги 9 и 10 связан с датчикодержателем И датчика 12. К датчикодержателю шарнирно присоединены нружинные телескопические амортизаторы 13 с пружиной растяжения 14, подвижным штоком 15, направляющая 16 которого установлена в шарнирной головке 17, размещенной на стойке 18. При котором передний конец изделия 19 проходит под датчиком, контактирует с наконечником 7, поворачивает Г-образный рычаг, преодолевая усилие пружины 20. Противоположное плечо Г-образного рычага снимает воздействие гибкой тяги 8 на рычаг 6, который, поворачиваясь, опускает на изделие закрепленный на его конце держатель. После соприкосновения держателя с контролируемым изделием рычаг 6 ослабляет натяжение тяг 9 и 10, обеспечивая держателю возможность слежения. Слежение обеспечивается прижатием держателя амортизаторами, которые ориентируют датчик нормально к контролируемой поверхности.
В момент окончания контроля, когда изделие еще находится под наконечником, но вышло из-под датчика, последний соскакивает по торцу изделия под воздействием пружин амортизатора и опускается до состояния равновесия в пружинной системе, а после выхода заднего конца изделия, из-под наконечника, конец Г-образного рычага поднимает гибкой тягой 8 рычаг 6, возвращая датчик в исходное положение.
Предложенное устройство обеспечивает автоматическую установку, слежение и надежное ориентирование датчика относительно поверхности контролируемого изделия.
Формула изобретения
Устройство к дефектоскопу для ориентации датчика при поточном контроле изделий, содержащее станину, установленную на ней с возможностью вращения вокруг своей оси планшайбу, через которую в процессе контроля перемещается контролируемое изделие, закрепленный на планшайбе кронштейн с системой рычагов, датчикодержатель и датчик, отличающееся тем, что, с целью повышения точности ориентации, оно снабжено двумя, расположенными в плоскости, перпендикулярной направлению перемещения изделия,
телескопическими амортизаторами, один конец каждого из которых шарнирно соедине н с датчикодержателем, другой -с планшайбой в ее диаметрально противоположных точках, а система рычагов включает рычаг, один
конец которого шарнирно соединен с кронштейном, а другой -с датчикодержателем посредством гибких тяг, и Г-образнын рычаг, шарнирно установленный на кронштейне, одно плечо которого контактирует в процессе
контроля с поверхностью изделия, а второе с помощью гибкой тяги связано с первым рычагом в точке, делящей его на части, пропорциональные отношению хода датчика и хода контактирующего плеча Г-образного рычага.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентации преобразователя дефектоскопа | 1984 |
|
SU1165969A1 |
| Устройство для центрирования прутков при неразрушающем контроле | 1990 |
|
SU1772727A1 |
| Устройство ультразвукового контроля цилиндрических изделий | 1982 |
|
SU1083106A1 |
| Устройство для установки датчика дефектоскопа на изделие | 1980 |
|
SU930102A1 |
| Устройство к дефектоскопу для ориентации датчика при поточном контроле изделий | 1977 |
|
SU1089502A1 |
| Устройство для ультразвукового контроля цилиндрических изделий (его варианты) | 1981 |
|
SU968746A1 |
| Устройство для автоматизированного ультразвукового контроля сварного шва | 1989 |
|
SU1663536A1 |
| Сканирующее устройство | 1989 |
|
SU1640633A1 |
| УСТРОЙСТВО ДЛЯ МАГНИТНОГО КОНТРОЛЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ТРУБЫ | 2017 |
|
RU2661552C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
12
20
Риг 1
