Изобретение относится к устройствам для неразрушающего контроля качества изделий и может быть использовано в различных отраслях энергетического машиностроеиия и котлостроения при дефектоскопии изделий сложной формы, например плавниковых труб газоплотных панелей.
Известно устройство для ориентации преобразователя дефектоскопа, содержащее генератор постоянного тока, регулируемый резистор, два опорных ролика, между которыми закреплен преобразователь, рычажной механизм, выполненный в виде подпружиненного . двуплечего рычага, концы которого через щарниркые оси и соответствующие тяги соединены с Г-образными штоками, кинематически связанными с преобразователем, одна из шарнирных осей совмещена с осью якоря генератора, а на сопрягаемой тяге размещена неподвижная обмотка генератора, замкнутая на регулируемый резистор 1.
Недостатками этого устройства являются сложное конструктивное исполнение, низкая надежность работы, обусловленная частыми взаимосвязями узлов и отдельных элементов, ограниченные технологические возможности при контроле изделий сложной формы из-за невозможности установки устройства в труднодоступных местах.
Наиболее близким к изобретению является устройство для ориентации преобразователя дефектоскопа, содержащее несущую часть датчикодержателя, датчикодержатель с направляющей и связанный с ним механизм слежения 2.
Недостатками известного устройства являются отсутствие компактности, ограниченные технологические возможности, обусловленные тем, что не обеспечивается ориентация преобразователя дефектоскопа по нормали в каждой точке поперечного сечения изделия, что не позволяет выявлять разноориентированные дефекты в сечении, кроме того, технологические возможности ограничены из-за неддстаточного числа степеней свободы преобразователя дефектоскопа.
Цель изобретения - расширение технологических возможностей при контроле изделий сложной формы.
Поставленная цель достигается тем, что устройство для ориентации преобразователя дефектоскопа, содержащее несущую часть датчикодержателя, датчикодержатель с направляющей и связанный механизм слежения, снабжено механизмом поворота датчикодержателя, выполненным в виде С-образного захвата с осью вращения, соединенной с несущей частью датчикодержателя, взаимодействующего с направляющей датчикодержателя, последний выполнен в виде подпружиненного относительно несущей части цилиндрического корпуса с Т-образной направляющей на боковой поверхности, а механизм слежения выполнен в виде ведущих элементов, жестко соединенных с ними двух одноплечих рычагов, двух подвижных створчатых пластин, размещенных на общей оси вращения, закрепленной на несущей части, двух подпружи« ненных поворотных штанг и установленных под углом одно к другому двух колес, оси которых закреплены на штангах, последние взаимодействуют через пружины со створчатыми пластинами, которые шарнирно соединены с одноплечими рычагами.
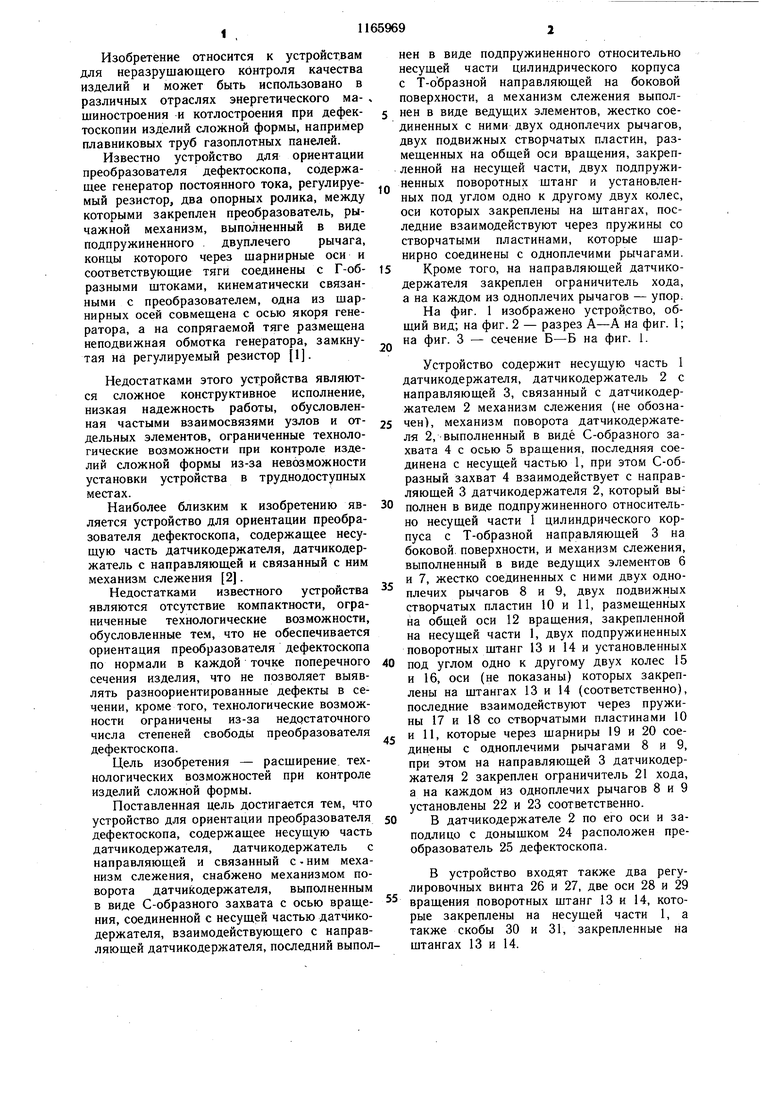
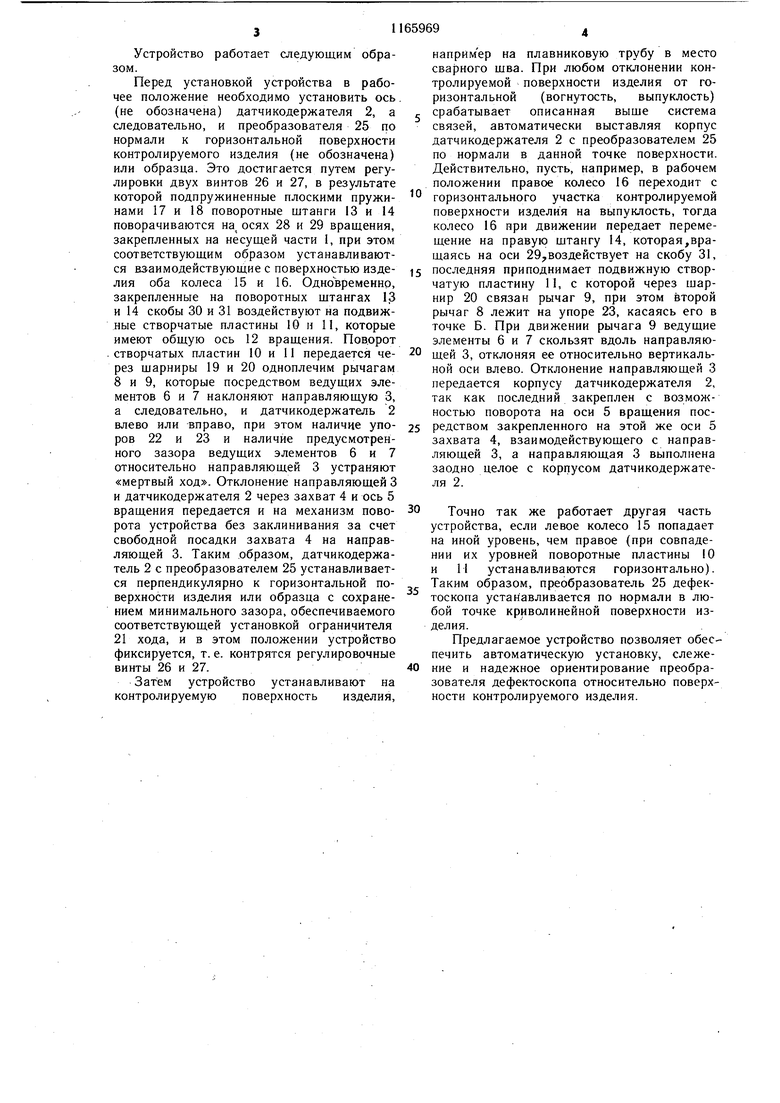
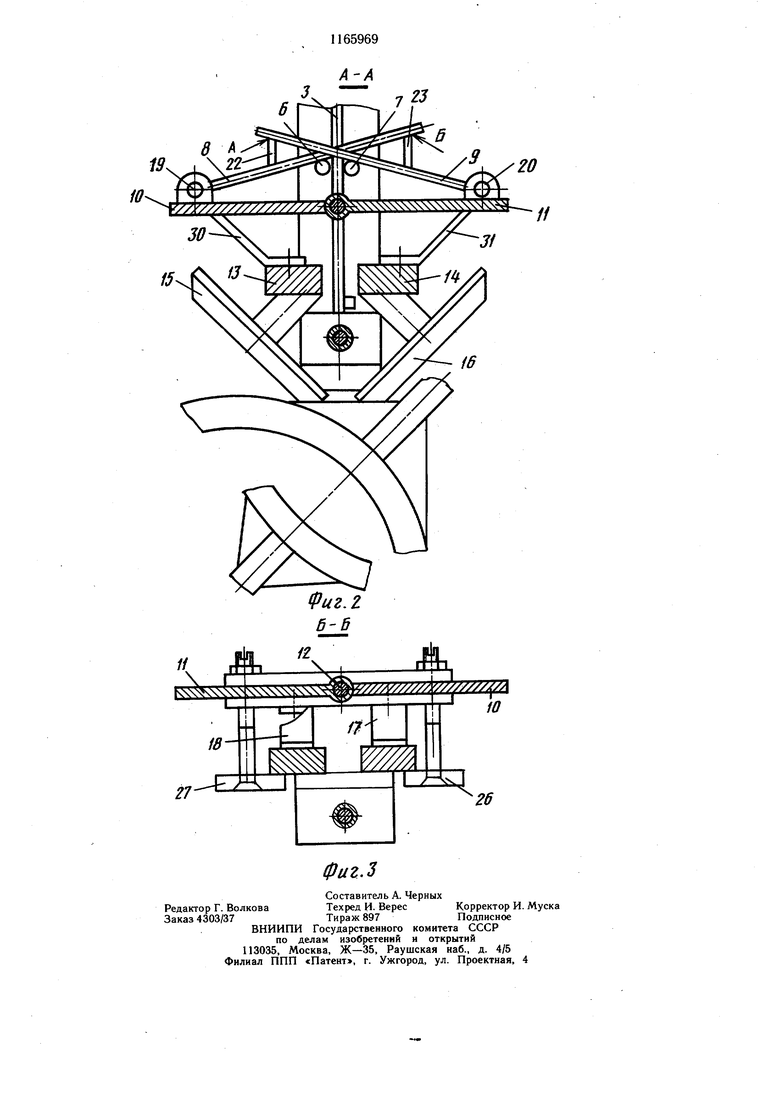
5 Кроме того, на направляющей датчикодержателя закреплен ограничитель хода, а на каждом из одноплечих рычагов - упор. На фиг. 1 изображено устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1.
Устройство содержит несущую часть 1 датчикодержателя, датчикодержатель 2 с направляющей 3, связанный с датчикодержателем 2 механизм слежения (не обозначен), механизм поворота датчикодержателя 2, выполненный в виде С-образного захвата 4 с осью 5 вращения, последняя соединена с несущей частью 1, при этом С-образный захват 4 взаимодействует с направляющей 3 датчикодержателя 2, который вы0 полней в виде подпружиненного относительно несущей части 1 цилиндрического корпуса с Т-образной направляющей 3 на боковой, поверхности, и механизм слежения, выполненный в виде ведущих элементов б и 7, жестко соединенных с ними двух одноплечих рычагов 8 и 9, двух подвижных створчатых пластин 10 и 11, размещенных на общей оси 12 вращения, закрепленной на несущей части 1, двух подпружиненных поворотных щтанг 13 и 14 и установленных
0 под углом одно к другому двух колес 15 и 16, оси (не показаны) которых закреплены на штангах 13 и 14 (соответственно), последние взаимодействуют через пружины 17 и 18 со створчатыми пластинами 10
г и 11, которые через шарниры 19 и 20 соединены с одноплечими рычагами 8 и 9, при этом на направляющей 3 датчикодержателя 2 закреплен ограничитель 21 хода, а на каждом из одноплечих рычагов 8 и 9 установлены 22 и 23 соответственно.
0 В датчикодержателе 2 по его оси и заподлицо с донышком 24 расположен преобразователь 25 дефектоскопа.
В устройство входят также два регулировочных винта 26 и 27, две оси 28 и 29 вращения поворотных штанг 13 и 14, которые закреплены на несущей части 1, а также скобы 30 и 31, закрепленные на щтангах 13 и 14.
Устройство работает следующим обраом.
Перед установкой устройства в рабоее положение необходимо установить ось (не обозначена) датчикодержателя 2, а ледовательно, и преобразователя 25 по нормали к горизонтальной поверхности контролируемого изделия (не обозначена) или образца. Это достигается путем регуировки двух винтов 26 и 27, в результате которой подпружиненные плоскими пружинами 17 и 18 поворотные штанги 13 и 14 поворачиваются на осях 28 и 29 вращения, закрепленных на несущей части 1, при этом соответствующим образом устанавливаются взаимодействующие с поверхностью издеия оба колеса 15 и 16. Одновременно, закрепленные на поворотных щтангах 13 и 14 скобы 30 и 31 воздействуют на подвижные створчатые пластины 10 и 11, которые имеют общую ось 12 вращения. Пов.орот створчатых пластин 10 и 11 передается через щарниры 19 и 20 одноплечим рычагам 8 и 9, которые посредством ведущих элементов 6 и 7 наклоняют направляющую 3, а следовательно, и датчикодержатель 2 влево или вправо, при этом наличие упоров 22 и 23 и наличие предусмотренного зазора ведущих элементов 6 и 7 относительно направляющей 3 устраняют «мертвый ход. Отклонение направляющей 3 и датчикодержателя 2 через захват 4 и ось 5 вращения передается и на механизм поворота устройства без заклинивания за счет вободной посадки захвата 4 на направяющей 3. Таким .образом, датчикодержаель 2 с преобразователем 25 устанавливается перпендикулярно к горизонтальной поверхности изделия или образца с сохранением минимального зазора, обеспечиваемого соответствующей установкой ограничителя 21 хода, и в этом положении устройство фиксируется, т.е. контрятся регулировочные винты 26 и 27.
Затем устройство устанавливают на контролируемую поверхность изделия.
например на плавниковую трубу в место съарного шва. При любом отклонении контролируемой поверхности изделия от горизонтальной (вогнутость, выпуклость) срабатывает описанная выще система связей, автоматически выставляя корпус датчикодержателя 2 с преобразователем 25 по нормали в данной точке поверхности. Действительно, пусть, например, в рабочем положении правое колесо 16 переходит с
горизонтального участка контролируемой поверхности изделия на выпуклость, тогда колесо 16 при движении передает перемещение на правую штангу 14, которая,вращаясь на оси 29,воздействует на скобу 31,
5 последняя приподнимает подвижную створчатую пластину 11, с которой через шарнир 20 связан рычаг 9, при этом второй рычаг 8 лежит на упоре 23, касаясь его в точке Б. При движении рычага 9 ведущие элементы 6 и 7 скользят вдоль направляющей 3, отклоняя ее относительно вертикальной оси влево. Отклонение направляющей 3 передается корпусу датчикодержателя 2, так как последний закреплен с возможностью поворота на оси 5 вращения посредством закрепленного на этой же оси 5 захвата 4, взаимодействующего с направляющей 3, а направляющая 3 выполнена заодно целое с корпусом датчикодержателя 2.
0 Точно так же работает другая часть устройства, если левое колесо 15 попадает на иной уровень, чем правое (при совпадении их уровней поворотные пластины 0 и II устанавливаются горизонтально). Таким образом, преобразователь 25 дефектоскопа устанавливается по нормали в любой точке криволинейной поверхности изделия.
Предлагаемое устройство позволяет обеспечить автоматическую установку, слеже0 ние и надежное ориентирование преобразователя дефектоскопа относительно поверхности контролируемого изделия.
Ж
12.
//
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ультразвукового контроля цилиндрических изделий со стороны наружной поверхности | 1985 |
|
SU1365913A1 |
| Устройство для укладки и выгрузки изделий | 1981 |
|
SU1016220A1 |
| Сканирующее устройство к дефектоскопу для контроля протяженных изделий | 1990 |
|
SU1807382A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВКИ УГЛА СХОДИМОСТИ УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ | 1992 |
|
RU2049322C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Устройство к дефектоскопу для ориентации датчика | 1970 |
|
SU502306A1 |
| Изокинетическое устройство для тренировки спортсменов | 1986 |
|
SU1326293A1 |
| Устройство для подачи поддонов | 1980 |
|
SU899391A1 |
| Многопозиционный сверлильный автомат | 1978 |
|
SU774819A1 |
| Устройство для автоматизированного ультразвукового контроля сварного шва | 1989 |
|
SU1663536A1 |
УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ПРЕОБРАЗОВАТЕЛЯ ДЕФЕКТОСКОПА, содержащее несущую часть датчика 9 держателя, датчикодержатель с направляющей и связанный с ним механизм слежения, отличающееся тем, что, с целью расщирения технологических возможностей при контроле изделий сложной формы, оно снабжено механизмом датчикодержателя, выполненным в виде С-образного захвата с осью вращения, соединенной с несущей частью датчикодержателя, взаимодействующего с направляющей датчикодержателя, последний выполнен в виде подпружиненного относительно несущей части цилиндрического корпуса с Т-образной направляющей на боковой поверхности, а механизм слежения выполнен в виде ведущих элементов, жестко соединенных с ними двух одноплечих рычагов, двух подвижных створчатых пластин, размещенных на общей оси вращения, закрепленной на несущей части, двух подпружиненных поворотных щтанг и установленных под углом одно к другому двух колес, оси которых закреплены на щтангах, последние взаимодействуют через пружины со створчатыми пластинами, которые щарнирно соединены I с одноплечими рычагами. 2. Устройство по п. 1, отличающееся тем, (Л что на направляющей датчикодержателя закреплен ограничитель хода, а на каждом из одноплечих рычагов - упор. о: сд со о ;о
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство к дефектоскопу для сохранения постоянства зазора между преобразователем дефектоскопа и контролируемой поверхностью | 1977 |
|
SU739390A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство к дефектоскопу для ориентации датчика | 1970 |
|
SU502306A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
