(54) ДИСКРЕТНЫЙ ЭЛЕКТРОПРИВОД СО СТАБИЛИЗАЦИЕЙ СКОРОСТИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Дискретный электропривод со стабилизацией скорости | 1983 |
|
SU1108601A1 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1721783A1 |
| Цифровой электропривод постоянного тока | 1982 |
|
SU1117809A1 |
| Устройство для программного управления намоточным станком | 1989 |
|
SU1725184A1 |
| ЭЛЕКТРОПРИВОД МНОГОКАНАЛЬНОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1970 |
|
SU283358A1 |
| Устройство для управления шаговым двигателем | 1976 |
|
SU738092A1 |
| Способ управления шаговым двигателем и устройство для его осуществления | 1985 |
|
SU1310993A1 |
| Управляемый электропривод | 1983 |
|
SU1144201A1 |
| Аппарат магнитной записи | 1985 |
|
SU1297110A1 |
| Следящий электропривод | 1985 |
|
SU1259207A2 |
Известен дискретный электропривод со стабилизацией скорости, содержащий шаговый двигатель с блоком управления, блоком режима работы и датчиком шагов, обеспечивающими работу двигателя ,в режиме фиксации и бескоита:ктного двигателя постоянного тока по сигналам, пода1ваемьгм на шины «пуск и «останов, частотный измеритель скорости, вкл1Очаюп;ий в себя генератор импульсов, счетчик, схему сравнения и блок формирования «омапд.
С целью упрощения управления пуском и остановом в предложенный .привод введены дополнительный генератор импульсов и четыре ключа, управляющие 1входы двух из которых соединены с шиной «пуок, а управляющие -входы двух других - с шиной «останов. Два ключа связывают основной и дополнительный генераторы импульсов через блок формирования комалд со входОМ счетчика, а два других - выход схемы сравнения со входами блока режимов работы.
Кроме того, на валу шагового двигателя установлен дополнительный импульсный датчик Положения.
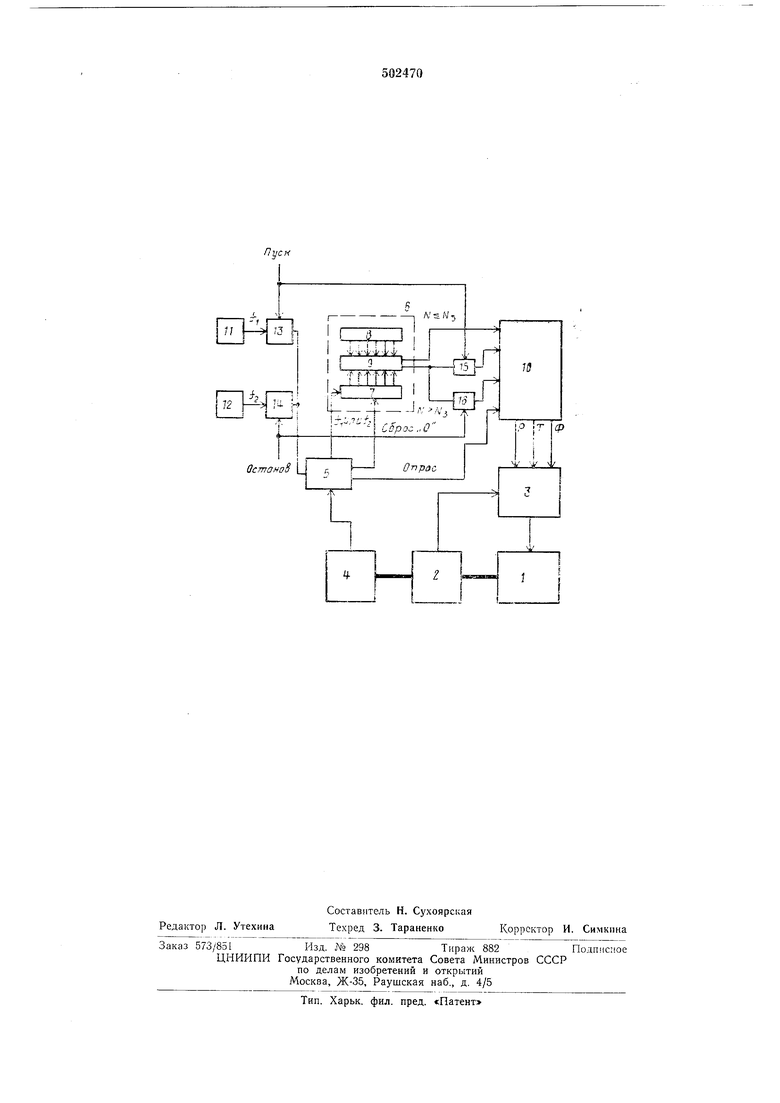
На чертеже приведена структурная схема привода.
На валу шагового электродвигателя / укреплены датчик шагов 2, связанный со входом блока управления 5, и точный импульсный
датчик положения 4, подключенный ко входу блока формирования команд 5.
Команды с блока 5 поступают на измеритель скорости 6, состоящий из счетчика 7, задатчика скорости 8 и схемы сравнения 9, а также на блок режимов работы W. Основной // и вспомогательный 12 генераторы импульсов через ключи J3, 14 и блок 5 с измерителе-м скорости 6, а один из выходов схемы сравнения 9 через ключи /5 и 16 - со входами блока режимо1В работы 10.
Привод работает следующим образом. При подаче сигнала «Пуск открываются ключи 13 и 15, а ключи 14, 15 закрываются. Импульсы с генератора 11 через блок 5 поступают на вход счетчика 7, который перед этим был обнулен. Одновременно с командой «Пуск на блок 10 подается сигнал, соответстзующ: 11 требуемому направлению дв11жения, и двигатель /, управляемый по сигналам датчика шагов 2, разгоняется в режиме бесконтактного двигателя постоянного тока по сигналу Р (разгон), поступающему с блока 10 на блок управления 3. После поворота ротора двигателя 1 па угол Дв, определяемый ценой деления импульсного датчика 4, последний вырабатывает импульс, поступающий на блок формирования команд 5 и прекращающий подачу импульсов от генератора 11
на вход счетчика 7. Кроме того, по комаиде
с датчика 4 в блоке 5 вырабатываются вспомогательные импульсы, первый из которых опрашивает состояние блока 10, а второй сбрасывает счерчик 7 в нуль. Такая последовательность командных имлульсов позволяет измерить среднюЕО скорость двигателя на интервале Д6 -в соответствии с соотношением
де 7ir/v
гл
;период следова:ния имлульсов генератора 11;
N
число импульсов, записанных в счетчик 3 за врамя .поворота ротора двигателя на угол ДЭ.
Число имлульсов N, записанное в счетчик 7, сравнивается 1при помощи схемы сравнения 9 € заданны в задатчике скорости 8 числом Скорость обратно лропордиональна числу Л и если , то скорость двигателя меньше заданной и на соот,ветствуюш,ем выходе схемы сравнения 9 появляется сигнал, который через ключ 1,5 ло команде импульса «опрос подтверждает первоначальное состояние блока 10. |Вспомогательный импульс «Сброс О обнуляет счетчик 7, подготавливает его к подсчету числа Л на следуюш;ем интервале Ав.
Когда на некотором интервале Дв выполняется соотношение . сигнал с соот.ветстзуюшего выхода схемы сравнения 9 переводит блок 10 В режим торможения. Эта команда исполняется после поступления импульса «Опрос с блока 5 и возникновения сигнала на выходе Т (тор|можение) блока 10. Это означает, что двигатель достиг заданной скорости, и ,в дальнейшем она лоддерживается в релейном режиме.
Для остановки привода подается команда «Останов, ло которой ключи 14 и 16 открываются, а ключи :/о и 15 за1кры1ваются. При этом на вход счетчкка 7 .поступают импульсы от генератора 12, .частота следования которых выбирается существенно меньшей, чем -частота генератора //, т. е. (где f, /2 - частоты генераторов 11 я 12 соответственно). Значение скорости, регистрируемое измерителем скорости 6, зависит от частоты измерительного генератора. При двигатель тормозится до тех пор, пока средняя скорость на интервале Дв не дости1гнет значения
А 9/, Л/,
В ЭТОМ случае сигнал с выхода схемы сравнения 9 через ключ 16 переводит блок режимов работы 10 и соответственно шаговый двигатель / в режим фиксации. Эта команда выполняется после поступления импульса «Олрос от блока 5 и возникновения сигнала на выходе Ф (фиксация) блока 10.
Олисанная система обеспечивает высокую стабильрюсть скорости, малые времена пуска и останова при сравнительно простой структуре.
Точность стабилизации скорости зависит от цены деления импульсного датчика положения 4, 1которая может быть в частности выбрана равной шагу двигателя /. В этом случае в качестве и мпульского датчика положения может быть использован основной датчш -коллектор. Импульсный датчик и датчикколлектор могут быть конструктивно объединены.
Формула изобретения
«останов, частотный измеритель скорости, включающий в себя .генератор импульсов, счетчи.к, схему сравнения и (блок .формирования команд, отличающийся тем, что, .с целью упрощения управления пуском и остановом, введены дополнительный генератор импульсов и четыре ключа, управляющие входы двух из которых соединены с шиной «пуск, а управляющие (Входы двух других - с шиной «останов ; причем два ключа связывают основной и дополнительный генераторы импульсов через блок формирования команд со входом счетчика, а два других выход схемы сравнения со входами блока режимов работы.
I Л/sW,
I.
Л
Фч1Х1-ф
