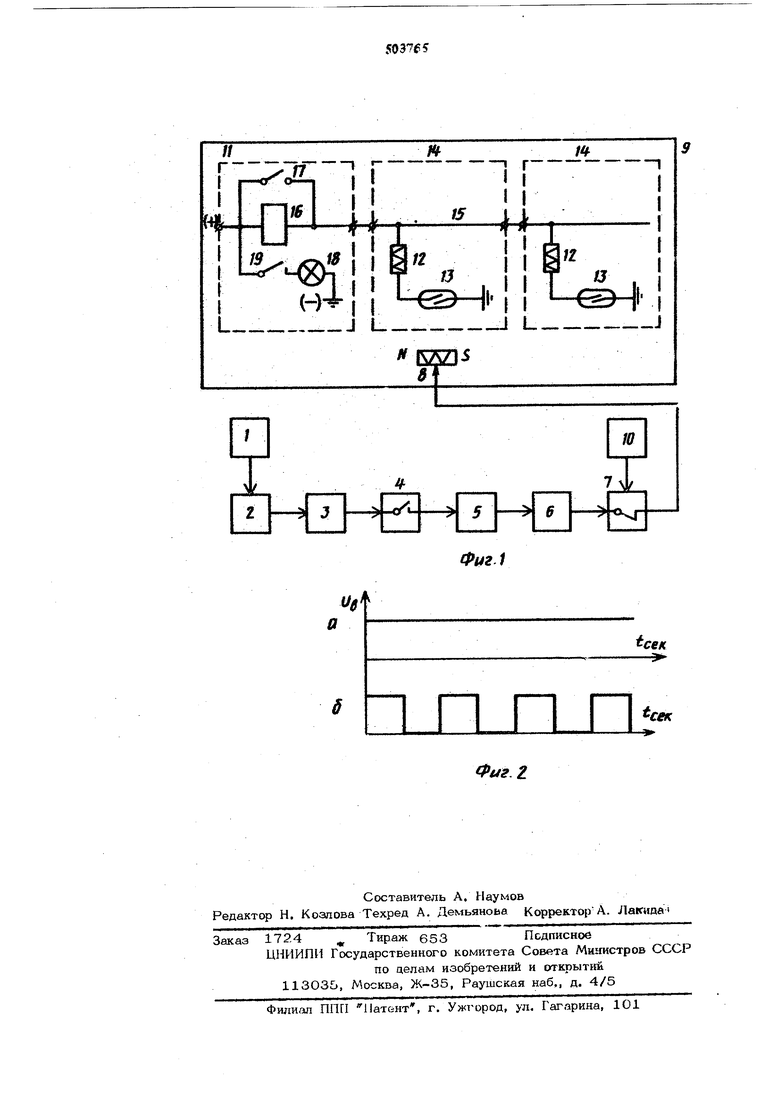
сом источника питания (на фиг, 1 не jioказан) и линией связи 15, выключатель 17 для шунтирования реле 16 точной остановки, сигнализатор 18 точной остановки вагона-самосвала на бункере, включенный в пень питания черег замыкающие контакты 19 реле 16 точной остановки. Устройство работает следующим обраI:ON;. При подходе железнодорожного состава к бункеру в момент прохождения вагона 14 над электромагнитом 8 геркон 13 входит в магнитное поле электромагнита 8, контакты геркона 13 замыкаются, при этом образуется электрическая цепь: плюс источника пцтания, реле 16, линия связи 15 электропневматический вентиль 12; геркон 13, Miffiyc источника питания (земля). По образовавшейся цепи проходит электрическийток, достаточный для срабатывания реле 16, ограничивающего ток, но недостаточный для срабатывания электропневматичес кого вентиля 12. При этом замыкающие контакты 19 реле 16 замыкаются, сигнализатор 18 точной остановки вагона у бун кера загорается. По показанию (загоранию) сигнализатора 18 машишют останавливает состав. Если вагон 14 точно установлен на бункере, сигнализатор 18 включен постоянно. При уровне сыпучего материала в бункере ниже верхнего контролируемого предела электрический сигнал на выходе уров немера 1 отсутствует, на выход усилителя 2 электрический сигнал не поступает, выходное реле 3 обесточено, замыкающие контакты 4 выходного реле 3 разомкнуты мультивибратор 5 отключен, реле 6 обесточено, замыкающие контакты 7 реле 6 замкнуты, на электромагнит 8 системы дистанционной разгрузки вагонов-самосвал непрерывно пост т1ает электрический ток от источника питания 10 (см.. фиг. 2, Ot) Сигнализатор 18 включен непрерывно, что является свидетельством возможности разгрузки. Машинист включает выключатель 17 (разгрузка), реле 16 щунтируется, образуется электрическая цепь: плюс источника питания, выключатель 17, ликия связи 15, электрситнеьматический BeHv тиль 12, геркон 13, минус 1юточника питания (.земля ). Электропневматический вентиль 12 вклю чается, открывая доступ сжатого в цилиндр разгрузки вагона-самосвала. Вагон разгружается. Так происходит управление разгару. вагонов-самосвалов, если уровень сыпучего материала в бункере ниже верхнего контролируемого предела. Если уровень сьшучего материала в бункере достиг или выше верхнего контролируемо1ч предела, на выходе уровнемера 1 сьшучего материала появится электрический сигнал, который поступает на вход усилителя 2, выходное реле 3 получает питание и своим .замыкающим контактом 4 включает мультивибратор 5t генерирующий прямоугольные имлульсы (см. фиг, 2б), частота которых выбирается в пределах восприимчивости световых пульсаций человеческим зрением, но не более 16 ГЦ. Геркон 13 .замыкается периодически с частотой пульсаций магнитного поля (с частотой генерации симметричных прямоугольных импульсов мультивибратора 5). При этом на пульте управления 11 сигнализатор 18, включенный через .замыкающие контакты 19 реле 16, срабатывает периодически, сигнализируя машинисту локомотива о запрещении разгрузки вагона-самосвала в бункер. В этом случае, если машинист включит выключатель 17, вагон не разгрузится, так как электропнеьматический вентиль 12 будет то получать питание и подавать сжатый воздух в цилиндры разгру.зки вагона, то терять питание, выпуская сжатый во.здух Е атмосферу и.з цилинд; ов ра.згрузки. Формула из обретен.ия Устройство для управления выгру.зкой сыпучих материалов и.з вагонов-самосвалов, содержащее уровнемер, соединенный через усилитель с выходным реле, блок дистанционной ра.згрузки, в котором на пульте управления локомотива парал;1ельно выключателю подключено включенное в линию СВЯ.ЗИ реле точного останова, через контакт которого включен сигнализатор точного ос.- таноаа, а на каждсйу вагоне к линии связи подключены последовательно алектропневматический вентиль и геркон, установленный В пункте выгрузки электромагнит, источник питания, о тли ч а ю щ е вся тем, что, с целью предотвращения аварии в пункте выгру.зки сыпучего м.атериала, оно снабжено включенным через контакт выходного реле мультивибратором с реле, через контакт которого источник питания подключен к электромагниту.
Фиг 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционного управления выгрузкой вагонов-самосвалов | 1982 |
|
SU1039770A1 |
| Устройство для дистанционного управления разгрузкой думпкаров | 1983 |
|
SU1092076A1 |
| Устройство для дистанционного управления выгрузкой вагонов-самосвалов | 1982 |
|
SU1062075A1 |
| Устройство для контроля состояния однопроводной цепи управления электропневматическими вентилями поезда | 1978 |
|
SU768679A1 |
| Устройство для контроля состояния однопроводной цепи управления электропневматическими вентилями поезда | 1978 |
|
SU710845A1 |
| Устройство для контроля состояния однопроводной цепи управления электропневматическими вентилями поезда при разгрузке вагонов-самосвалов | 1981 |
|
SU975477A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 2018 |
|
RU2709270C1 |
| Устройство для управления разгрузкой думпкаров | 1977 |
|
SU716894A1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ТОРМОЗ ЖЕЛЕЗНОДОРОЖНЫХ ПОДВИЖНЫХ ЕДИНИЦ | 2002 |
|
RU2243913C2 |
| УСТАНОВКА ДЛЯ АВТОМАТИЧЕСКОГО НАБОРА ШИХТЫ | 1970 |
|
SU277714A1 |
сек
9i
Фиг 2.
