-1) ль тод лгичг-гк.ий злхплт для жрлкзоБЕТоииых
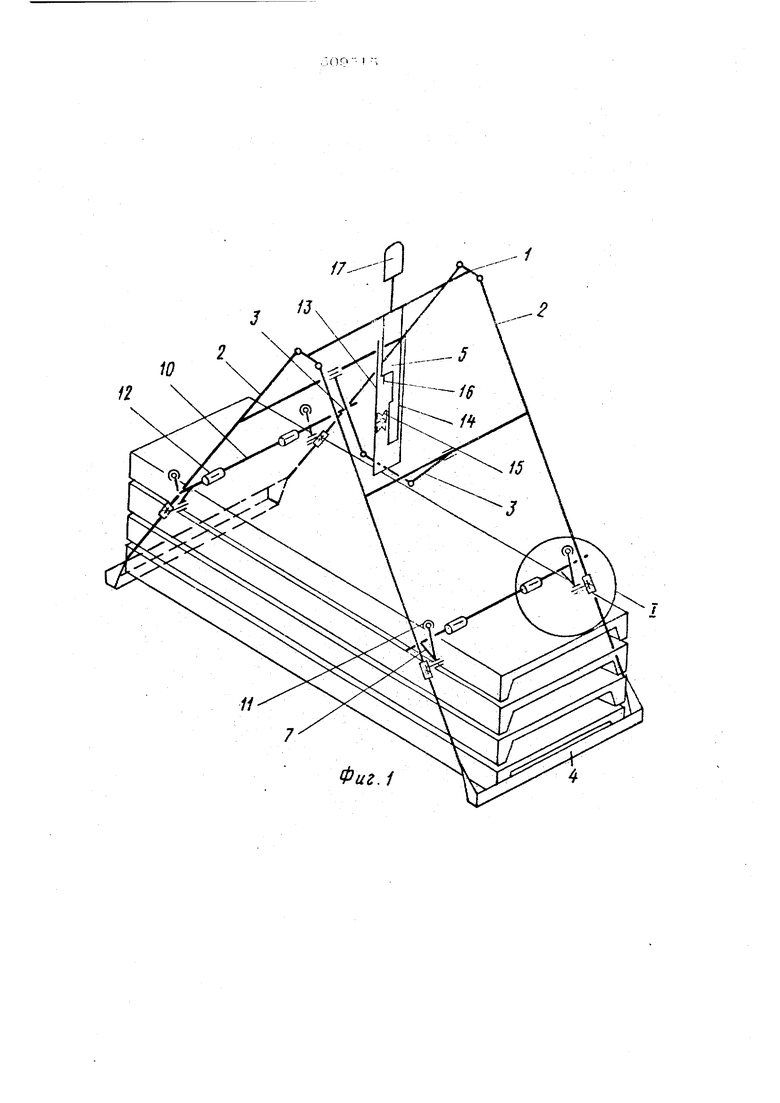
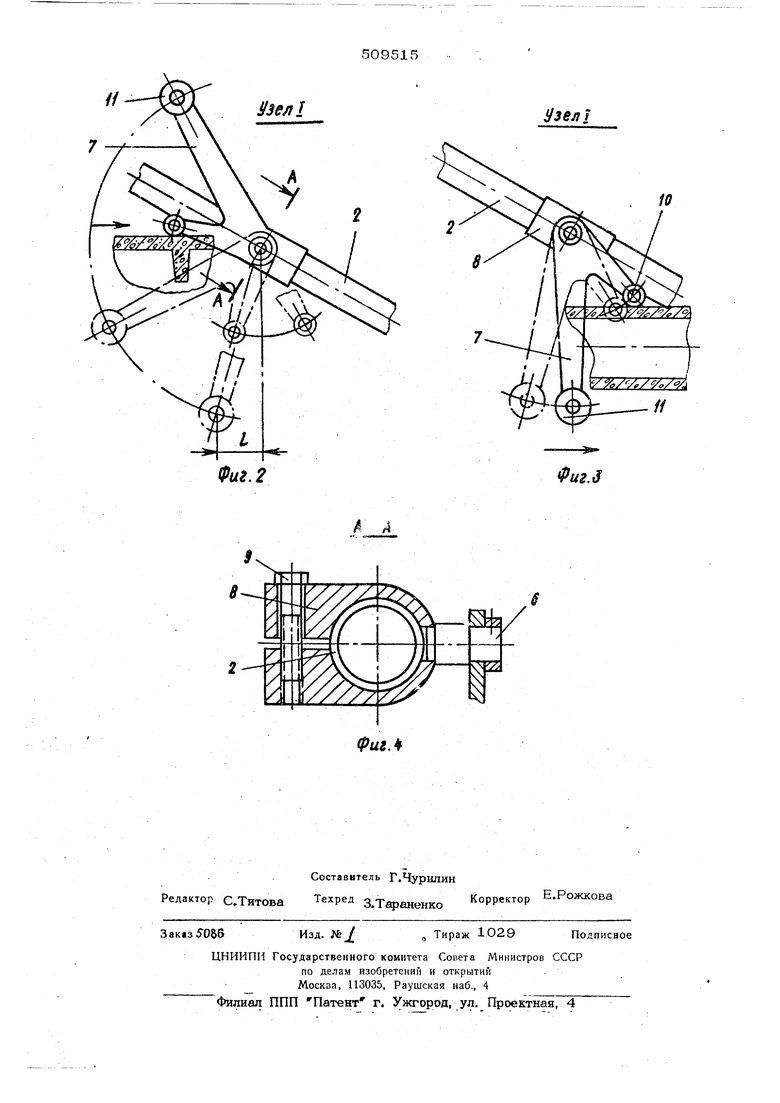
. ИЗДЕЛИЙ 50 I(,4,4141 7 гЬ1Т(1,1ШРТты таким образом, Mrifji.i нлмлиыо плечи с опорными роликами -11 до опхвата пакета устанап,чиналис1 СП смогиением относительно вертикальной плоскости подвески рычагов 7 (отрезок на фиг. 2). Механизм фиксации 5 состоит из корпуса 13, 14, поворотной звездоч ки 15 и упора 16. Корпус 13 шарнирно соединенС рычагами 3, а На ползуне 14 закреплена грузовая скоба 17. Автоматический захват работает следующим образом,. После ориентации над пакетом изделий (захват опускают до полного опирания на верхнее изделие. При этом опорные ролики 11, контактрфуя с поверхностью верхнего изделия пакета, разворачиваются вм сте с рычагами 7. Одновременно продолж ется опускание захвата, в контакт с верх ним изделием вступают ролкки 12 штанги 1О, и поворот рычагов 7 продолжается д контак а концов штанги 10 с тягами 2. В этом положении продолжают опускание захвата, тяги 2 .катятся на роликах 12, пока не сработает механизм фиксации 5 т. е. упор Гб йоворачивает звездочку 15 которая в конце хода ползуна 14 занимае горизонтальное положение. Затем начинают подъем захвата. При этом ползун 14, перемешаясБ в корпусе 13, поворачивает звездочку 15 в вертикальное положение, при котором она не - препятствует перемещению ползуна 14 относительно корпуса 13. При перемещен ползуна 14 одновременно поднимается жестко соединенная с ним подвеска 1, вследствие чего сводятся захватные орга ны 4 и посредством тяги 2, поворачивае ся система рычагов 3, Когда захватные Органы переместятся до контакта с нижним изделием начинают подъем пакета и его транспортировку к месту укладки. После укладки пакета с изделиями от него отделяют захват. Для этого грузовую скобу 17 вместе 1 с п:)т:гут1 - 1 Г1пукаютг:я, ; inxr.aTHf.ie пргмпь 4 р-гия)пятся, ПОНИ упор 16 nj-in КРИТ. и со звездочкой 15 не повернет ее на некоторый угол, после чего происходит стопорение механизма фиксации 5, укчцег о захватт 1е органы 4 в разведенном положении. При захвате пакета узких изделий опорные ролики 11 проходят мимо, а в контакт с пакетом вступают ролики 12, поворачивая рычаги 7 по направлению стрелки В (см. фиг. З) до контакта кон- цов штангн 1О с тягами 2. В этом положении продолжают опускание устройства и далее происходит процесс захт.ата, транспортировки и укладки паке-га изделий, onHcainitin выше. Описанный автоматический захват обеспечивает захватывание и транспорт1фов- ку не только пакета, но и нескольких или одного изделия. Дгя этого производится ето пореналллка. Ослабляют креп- ление втулок 8 ипоследние устанавливают на TjTax в определенном месте, поело Чего их снова закрепляют болтамт Г). Формула и 3 о б р е т е н и я Автоматический захват для железобетонных изделий, содержащий тяги, шарнирно соединенные с подвеской и системой рычагов, захватные органы, снабженные упорами, и механизм фиксации, соединенный с одной стороны с подвеской, а с другой.с системой рычагов, о т л и ч а ю щ и йс я тем, что, с целью обеспечения захвата штабелированных изделий, упоры выполнены в виде нёравноплечих рычагов, например у -образных, у которых короткие плечи связаны общей штангой, снабженных опорными роликами, установленными с возможностью смешения относительно вертикальной плоскости подвески, шарнирно подвешенных на полуосях, закрепленных на втулках,- керемещаемых вдоль тяг и фиксируемых при переналадке. Фиг. 1
//
Фиг. 2
Узел
10
11
Фиг.д
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватная система | 1989 |
|
SU1768491A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Автоматический захват для железобетонных изделий | 1991 |
|
SU1785988A1 |
| УСТРОЙСТВО для ПЕРЕГРУЗКИ ШТУЧНЫХ ГРУЗОВ | 1968 |
|
SU213307A1 |
| АВТОЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ МЕЛКОШТУЧНЫХ БЕТОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2337052C1 |
| Устройство для укладки бутылок в контейнеры | 1983 |
|
SU1088998A1 |
| Клещевой захват | 1977 |
|
SU703467A1 |
| Грузозахватное устройство | 1984 |
|
SU1196329A1 |
| Грузозахватное устройство | 1987 |
|
SU1477649A1 |
| Захватное устройство для контей-HEPOB | 1979 |
|
SU816932A1 |